 基于F280025C controlCard和DRV8312-Kit的InstaSPIN FOC軟硬件使用指南
基于F280025C controlCard和DRV8312-Kit的InstaSPIN FOC軟硬件使用指南
隨著市場需求的發展,F28002x系列擁有100MHz C28x 32Bit DSP CPU,高達128KB Flash和24KB RAM,有兩個獨立的12位ADC轉換器,每個ADC轉換器高達3.45MSPS采樣率,有16個ADC通道,有14路ePWM輸出(其中8路支持高精度HRPWM,最高可到達150ps精度),有四個窗口比較器CMPSS,支持CAN和LIN通訊,有48腳/64腳/80腳LQFP三種封裝,因此,非常適合做各種風機,水泵,油泵,空調壓縮機等電機控制應用以及做交錯式PFC,圖騰柱PFC,LLC,移相全橋等數字電源拓撲控制。
F280023C/F280025C型號內置TI高性能的無傳感器InstaSPIN FOC控制算法,其優異的觀測器性能,可以提升客戶產品的啟動性能,也可以讓客戶產品運行在更低的工作頻率。過調制功能可以讓客戶產品運行在更高的工作頻率,從而提升了電機運行的效率。InstaSPIN FOC同時還自帶電機參數自學習功能,通過自學習功能,可以識別電機的電阻,電感和反電勢參數, 從而自動生成速度環和電流環控制的PID,因此大大簡化了客戶匹配電機的過程,減少了客戶的開發時間。同時降低了客戶對于FOC電機控制的經驗要求,因此深受廣大客戶的歡迎。從而廣泛應用于白電空調壓縮機,冰箱壓縮機,洗衣機電機,無人機動力電機,新能源汽車空調壓縮機,各種風機,水泵,油泵等控制場合。
本文將介紹基于F280025C ControlCard和DRV8312-Kit的InstaSPIN FOC軟硬件使用指南。
硬件準備工作
首先, 請準備好下面三個硬件:
1. TMDSCNCD280025C -- F280025C ControlCard
2. DRV8312-C2-KIT/DRV8312-69M-KIT — DRV8312電機控制套件這個套件包含以下內容:
DRV8312 三相電機控制板
PiccoloTMDSCNCD28035ISOcontrolCARD或者TMDSCNCD28069MISOcontrolCARD
24 V 電源
USB 線
3. TMDSADAP180TO100 — 180PIN到100PIN轉接卡
因為DRV8312-KIT是比較早的電機控制套件, 設計時ControlCARD的接口是按第二代C2000 ControlCARD設計的100PIN接口, 而F280025C ControlCARD是按照第三代C2000 ControlCARD設計的120接口,因此F280025C ControlCARD需要通過TMDSADAP180TO100轉接才能接到DRV8312-KIT的接口上。
硬件設置
接下來請按下面步驟來設置硬件。
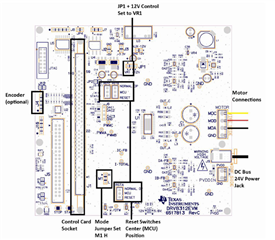
步驟一. DRV8312-KIT跳線和撥碼開關設置:
如下圖所示:JP1跳線接到VR1, M1接到H ,RSTA/RSTB/RSTC撥到中間(MCU)位置
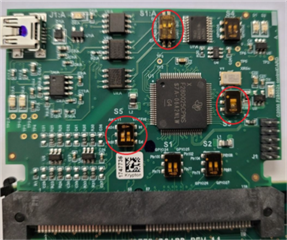
步驟二.F280025C ControlCard撥碼開關設置
如下圖所示:S1A全撥到上面, S3 撥到上面 ,S5 左邊的撥到下面,右邊的撥上面
步驟三:將F280025C ControlCard接到TMDSADAP180TO100上, 然后將它們一起接到DRV8312-KIT的J1 ControlCard插槽上,如下圖所示:
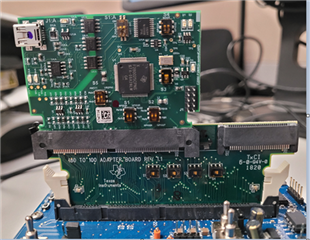
步驟四:
1.將電機三相輸入接到M0A/MOB/MOC,
2.將Mini USB接口一端鏈接電腦USB口,一端連接到F280025C ControlCard J1:A接口上,
3.24V電源接到J9
整體安裝完成圖如下:

軟件準備工作
請確保已經安裝C2000Ware_MotorControl_SDK_F28002x_3_00_00_01
步驟一:打開CCS,導入項目CCS項目,例如is05_motor_id_eabi
(項目在“..C2000Ware_MotorControl_SDK_F28002x_3_00_00_01solutionsdrv8312_c2_kitf28002x
ccssensorless_foc”路徑下)
步驟二:確保hal.c(在..C2000Ware_MotorControl_SDK_F28002x_3_00_00_01solutions
drv8312_c2_kitf28002xdriverssourcehal.c路徑下)文件,HAL_setupADCs(HAL_Handle handle)函數中,ADC SOC配置如下:
// configure the SOCs for drv8312kit_revD
// IA-FB - A1/RA0
ADC_setupSOC(obj->adcHandle[0],ADC_SOC_NUMBER0,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN1, 14);
// IB-FB - C1/RC0
ADC_setupSOC(obj->adcHandle[1],ADC_SOC_NUMBER0,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN1, 14);
// IC-FB - A3/RA1
ADC_setupSOC(obj->adcHandle[0],ADC_SOC_NUMBER1,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN3, 14);
// ADC-Vhb1 - C11/RC1
ADC_setupSOC(obj->adcHandle[1],ADC_SOC_NUMBER1,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN11, 14);
// ADC-Vhb2 - A7/RA2
ADC_setupSOC(obj->adcHandle[0],ADC_SOC_NUMBER2,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN7, 14);
// ADC-Vhb3 - C7/RC2
ADC_setupSOC(obj->adcHandle[1],ADC_SOC_NUMBER2,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN7, 14);
// VDCBUS - A14/RA3. DRV8312 board does not have capacitor onVbusfeedback, so
// the sampling needs to be very long to get an accurate value
ADC_setupSOC(obj->adcHandle[0],ADC_SOC_NUMBER3,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN14, 200);
// throttle - C0->RC3
ADC_setupSOC(obj->adcHandle[1],ADC_SOC_NUMBER3,ADC_TRIGGER_EPWM1_SOCA,
ADC_CH_ADCIN0, 14);
步驟三:確保user.h(在..C2000Ware_MotorControl_SDK_F28002x_3_00_00_01solutions
drv8312_c2_kitf28002xdriversincludeuser.h路徑下)中電流,電壓,截止頻率參數如下:
//! brief Defines the nominal DC bus voltage, V
//!
#defineUSER_NOMINAL_DC_BUS_VOLTAGE_V ((float32_t)(24.0f))
//! brief Defines the maximum voltage at the AD converter
//!
// Full scale voltage of AD converter, not the current voltage
#defineUSER_ADC_FULL_SCALE_VOLTAGE_V ((float32_t)(66.32f))
//! brief Defines the maximum current at the AD converter
//!
// DRV8312 motor control kit
#defineUSER_ADC_FULL_SCALE_CURRENT_A ((float32_t)(17.3f))
//! brief Defines the analog voltage filter pole location, Hz
//!
#defineUSER_VOLTAGE_FILTER_POLE_Hz ((float32_t)(714.14f))
步驟四:增加下面部分內容,并確保 #define USER_MOTOR my_motor_new
#define my_motor_new 600
#elif(USER_MOTOR == my_motor_new)
#defineUSER_MOTOR_TYPE MOTOR_TYPE_PM
#defineUSER_MOTOR_NUM_POLE_PAIRS (4)
#defineUSER_MOTOR_Rr_Ohm (NULL)
#defineUSER_MOTOR_Rs_Ohm (0.417878777f)
#defineUSER_MOTOR_Ls_d_H (0.0007190173f)
#defineUSER_MOTOR_Ls_q_H (0.0007190173f)
#defineUSER_MOTOR_RATED_FLUX_VpHz (0.0327013217f)
#defineUSER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#defineUSER_MOTOR_RES_EST_CURRENT_A (1.5f)
#defineUSER_MOTOR_IND_EST_CURRENT_A (-1.5f)
#defineUSER_MOTOR_MAX_CURRENT_A (5.0f)
#defineUSER_MOTOR_FLUX_EXC_FREQ_Hz (20.0f)
#defineUSER_MOTOR_NUM_ENC_SLOTS (NULL)
#defineUSER_MOTOR_INERTIA_Kgm2 (7.06154e-06f)
#defineUSER_MOTOR_MIN_MAX_HZ (5.0) // Hz
#defineUSER_MOTOR_FREQ_MAX_HZ (390.0) // Hz
#defineUSER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#defineUSER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz
#defineUSER_MOTOR_VOLT_MIN_V (4.0) // Volt
#defineUSER_MOTOR_VOLT_MAX_V (24.0) // Volt
至此軟硬件準備工作完畢,接下來可以參考MotorControl SDK InstaSPIN Lab Guide.pdf進行具體的InstaSPIN FOC軟件調試工作。
(MotorControl SDK InstaSPIN Lab Guide.pdf在..C2000Ware_MotorControl_SDK_F28002x_3_00_00_01
solutionscommonsensorless_focdocslabs路徑下)
審核編輯:郭婷
-
電源
+關注
關注
184文章
17704瀏覽量
249961 -
轉換器
+關注
關注
27文章
8694瀏覽量
147085 -
adc
+關注
關注
98文章
6495瀏覽量
544466 -
比較器
+關注
關注
14文章
1650瀏覽量
107185
發布評論請先 登錄
相關推薦
請問DRV8312-69M-KIT硬件電路圖哪里可以下載?
請問DRV8312-69M-KIT電機開發套件的問題
DRV8312-C2-KIT的例程無法DEBUG怎么辦?
motorware17的特性有哪些?
基于F280025C controlCard和DRV8312-Kit的InstaSPIN FOC軟硬件使用手冊
使用 DRV8301- HC - C2- KIT對DRV8301集成電機預驅動速度控制
DRV8312 Eval Kit的使用講解及應用
InstaSPIN FOC軟硬件使用指南

基于F280025C controlCard和DRV8312-Kit的InstaSPIN FOC 軟硬件使用指南

TMS320F280039C controlCARD信息指南
TMS320F280025C controlCARD信息指南
InstaSPIN-FOC?和InstaSPIN-MOTION?使用手冊





 工商網監
工商網監
評論