") 攝像機標定和立體標定
攝像機標定和立體標定
嘗試用OpenCV來實現(xiàn)立體視覺也有一段時間了,主要的參考資料就是Learning OpenCV十一、十二章和OpenCV論壇上一些前輩的討論。過程中磕磕碰碰,走了不少彎路,終于在前不久解決了最頭大的問題,把整個標定、校準、匹配的流程調(diào)試成功。(雖然還有一些問題至今尚未搞清)
在這里寫這篇文章,第一方面是給自己一個總結(jié),第二方面是感覺OpenCV立體視覺方面的資料還是相當零散和不完整,新手入門需要花很長時間才能摸索出來,第三方面,也是自己在過程中有些問題仍舊迷迷糊糊,希望可以拋磚引玉。
1.攝像頭
我用的攝像頭是淘寶上買的三維攝像頭,兩個USB Camera加一個可調(diào)節(jié)的支架。實物照片如下
1.1 三維攝像頭實物圖
雙USB攝像頭的OpenCV驅(qū)動可以參考以下鏈接
http://www.opencv.org.cn/index.php/使用DirectShow采集圖像
將上面代碼復(fù)制到自己的工程之后還需要對工程或者編譯環(huán)境做一下設(shè)置
VC6下的詳盡設(shè)置可以見代碼的注釋(修改工程的屬性)
VS2008中的設(shè)置也可以參照代碼注釋中VC++2005的設(shè)置(修改編譯環(huán)境)
2. 標定
由于OpenCV中cvStereoCalibrate總是會得到很夸張的結(jié)果(見下文5.1問題描述),所以最后還是決定用Bouguet的Matlab標定工具箱立體標定,再將標定的結(jié)果讀入OpenCV,來進行后續(xù)圖像校準和匹配。
Matlab標定工具箱的參考鏈接如下:
http://www.vision.caltech.edu/bouguetj/calib_doc/
上面有詳細的使用步驟,用起來相當?shù)姆奖恪?/p>
以下是我個人用Matlab工具箱進行立體標定的步驟,供參考,如果需要更詳細步驟的話還是參照上面的鏈接
把Matlab工具箱的文件copy到對應(yīng)目錄下,把所要標定的棋盤圖也放到.m文件所在的目錄下,然后在Matlab命令行窗口中打入calib_gui,選擇Standard之后便出現(xiàn)以下窗口
2.1. calilb_gui面板
我們先對右攝像頭的標定,所以先把從右攝像頭上采集到的棋盤圖復(fù)制到工具箱目錄下。
點擊Image names, 命令行窗口會提示你輸入圖片的basename以及圖片的格式(比如你圖片文件名是right1, right2, …, right10,basename就是right),然后Matlab會自動幫你讀入這些圖片,如下圖所示,可以看到,讀入了10幅右攝像頭的棋盤圖。
采集棋盤圖的時候要注意,盡量讓棋盤占據(jù)盡可能多的畫面,這樣可以得到更多有關(guān)攝像頭畸變方面的信息
2.2. 圖像basename讀入
2.3. 讀入的棋盤圖
然后再回到主控制界面,點擊Extract grid corners,提取每幅圖的角點
2.4. calib_gui面板
點擊完后,命令行會出現(xiàn)如下提示,主要是讓你輸入棋盤角點搜索窗口的大小。窗口定的大一點的話提取角點會比較方便點(即便點得偏離了也能找到),但也要注意不能大過一個方格的大小。剩下的兩個選項,只要回車選用默認設(shè)置就可以了
2.5. 選擇窗口大小
然后就開始了角點的提取工作,按一定順序分別提取棋盤的最邊上的角點,程序會自動幫你找到所有對應(yīng)的角點
2.6. 提取角點
2.7. 提取角點2
在提取第一幅圖的時候命令行窗口可能會提示你輸入方格大小,這里輸入你方格的實際大小就行,比如我方格是27mm,就輸入27。這步事實上相當關(guān)鍵,它定義了空間的尺度,如果要對物體進行測量的話,這步是必須的。
按相同的方法提取完10幅圖后,點擊Calibration,開始攝像頭標定
2.8. calib_gui面板
經(jīng)過多次迭代后,程序會最終得到攝像頭的內(nèi)外參數(shù),如下圖所示(圖中符號由于字體關(guān)系沒有完全顯示,中間的問號是表示誤差的加減號)
2.9. Calibration迭代過程及結(jié)果
可以通過面板上的Show Extrinsic查看一下標定結(jié)果,可以驗證一下標定外參數(shù)的結(jié)果
2.10. 外部參數(shù)圖示
驗證標定結(jié)果無誤之后,就點擊面板上的Save按鈕,程序會把標定結(jié)果放在一個叫Calib_Result.mat中,為了方便后續(xù)立體標定,把這個文件名改為Calib_Result_right.mat。
左攝像頭標定的方法與右攝像頭相同,生成的Calib_Result.mat之后,將其改名為Calib_Result_left.mat就可以了
左右攝像頭都標定完成之后,就可以開始立體標定了。
在Matlab命令行中鍵入stereo_gui啟動立體標定面板,如下圖所示
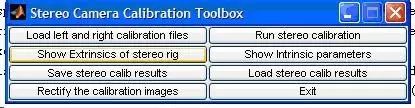
2.11. stereo_gui面板
點擊Load left and right calibration files并在命令行中選擇默認的文件名(Calib_Result_left.mat和Calib_Result_right.mat)之后就可以開始Run stereo calibration了,run之后的結(jié)果如下圖所示,左右攝像頭的參數(shù)都做了修正,并且也求出了兩個攝像頭之間的旋轉(zhuǎn)和平移關(guān)系向量(om和T)
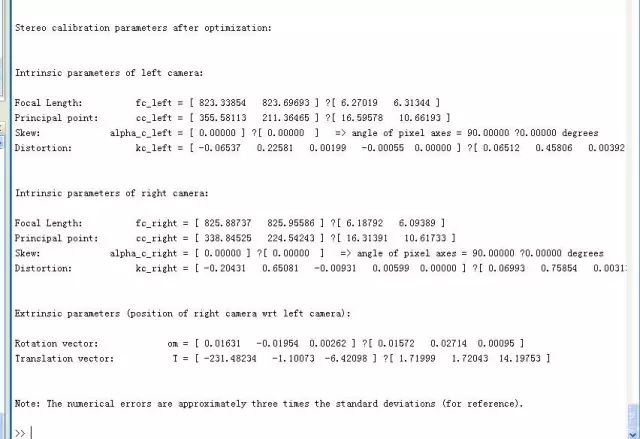
2.12. 立體標定結(jié)果
在面板上點擊Show Extrinsics of stereo rig,可以看到如下圖所示的雙攝像頭關(guān)系圖,可以看到,兩個攝像頭基本是前向平行的
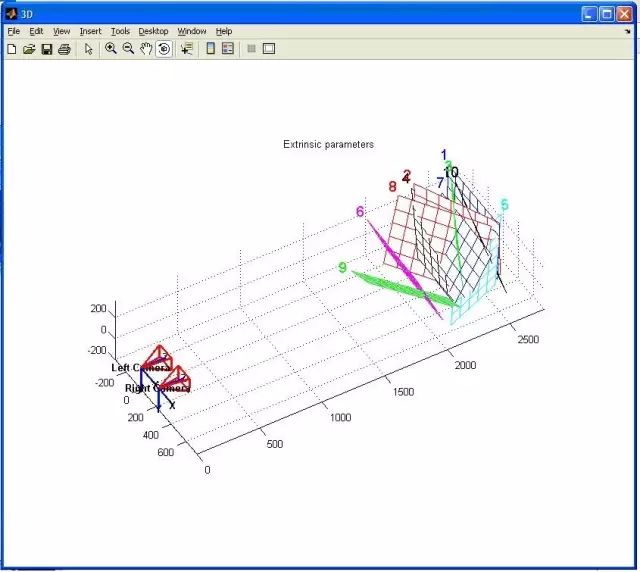
2.13. 雙攝像頭與定標棋盤間的位置關(guān)系
得到了立體標定參數(shù)之后,就可以把參數(shù)放入xml文件,然后用cvLoad讀入OpenCV了。具體的方法可以參照Learning OpenCV第11章的例子,上面就是用cvSave保存標定結(jié)果,然后再用cvLoad把之前的標定結(jié)果讀入矩陣的
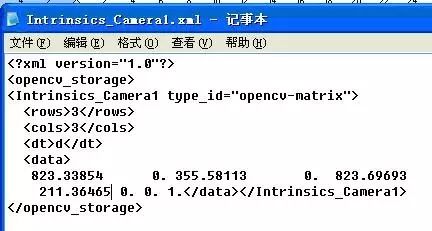
2.14. xml文件示例
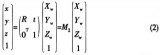
這里需要注意的是Matlab標定結(jié)果中的om向量,這個向量是旋轉(zhuǎn)矩陣通過Rodrigues變換之后得出的結(jié)果,如果要在cvStereoRectify中使用的話,需要首先將這個向量用cvRodrigues轉(zhuǎn)換成旋轉(zhuǎn)矩陣。關(guān)于Rodrigues變換,Learning OpenCV的第11章也有說明。
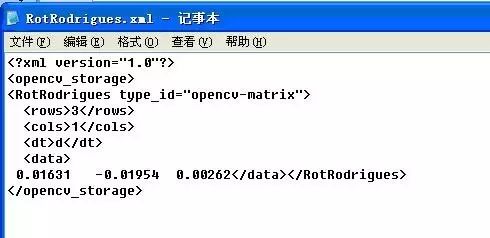
2.15. 旋轉(zhuǎn)矩陣的Rodrigues形式表示
3. 立體校準和匹配
有了標定參數(shù),校準的過程就很簡單了。
我使用的是OpenCV中的cvStereoRectify,得出校準參數(shù)之后用cvRemap來校準輸入的左右圖像。這部分的代碼參考的是Learning OpenCV 十二章的例子。
校準之后,就可以立體匹配了。立體匹配OpenCV里面有兩種方法,一種是Block Matching,一種是Graph Cut。Block Matching用的是SAD方法,速度比較快,但效果一般。Graph Cut可以參考Kolmogrov03的那篇博士論文,效果不錯,但是運行速度實在是慢到不能忍。所以還是選擇BM。
以下是我用BM進行立體匹配的參數(shù)設(shè)置
[cpp:nogutter]
BMState=cvCreateStereoBMState(CV_STEREO_BM_BASIC,0);
assert(BMState!=0);
BMState->preFilterSize=13;
BMState->preFilterCap=13;
BMState->SADWindowSize=19;
BMState->minDisparity=0;
BMState->numberOfDisparities=unitDisparity*16;
BMState->textureThreshold=10;
BMState->uniquenessRatio=20;
BMState->speckleWindowSize=13;
其中minDisparity這個參數(shù)我設(shè)置為0是由于我的兩個攝像頭是前向平行放置,相同的物體在左圖中一定比在右圖中偏右,如下圖3.1所示。所以沒有必要設(shè)置回搜的參數(shù)。
如果為了追求更大的雙目重合區(qū)域而將兩個攝像頭向內(nèi)偏轉(zhuǎn)的話,這個參數(shù)是需要考慮的。
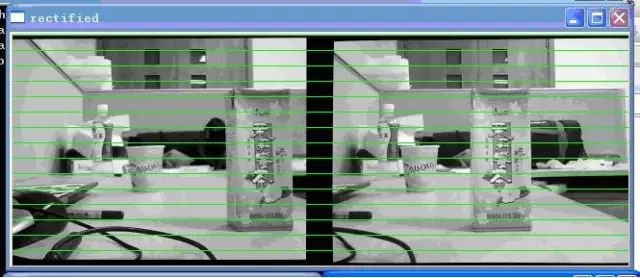
3.1. 校正后的左右視圖
另外需要提的參數(shù)是uniquenessRatio,實驗下來,我感覺這個參數(shù)對于最后的匹配結(jié)果是有很大的影響。uniquenessRatio主要可以防止誤匹配,其主要作用從下面三幅圖的disparity效果比對就可以看出。在立體匹配中,我們寧愿區(qū)域無法匹配,也不要誤匹配。如果有誤匹配的話,碰到障礙檢測這種應(yīng)用,就會很麻煩。

3.2. UniquenessRatio為0時的匹配圖,可以看到大片的誤匹配區(qū)域

3.3. UniquenessRatio為10時的disparity map, 可以看到誤匹配被大量減少了, 但還是有噪點

3.4. UniquenessRatio為20時的disparity map, 可以看到誤匹配基本被去除了, 點云干凈了很多
關(guān)于cvFindStereoCorrespondenceBM這個函數(shù)的源代碼,曾經(jīng)做過比較詳細的研究,過一段時間也會把之前寫的代碼注釋整理一下,發(fā)篇博文。
4.實際距離的測量
在用cvFindStereoCorrespondenceBM得出disparity map之后,還需要通過cvReprojectImageTo3D這個函數(shù)將單通道Disparity Map轉(zhuǎn)換成三通道的實際坐標矩陣。
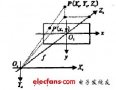
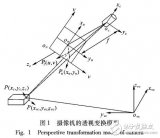
具體的數(shù)學(xué)原理可以參考下面這個公式(from chenyusiyuanhttp://blog.csdn.net/chenyusiyuan/archive/2009/12/25/5072597.aspx,實際深度的一些問題這篇博文中也有提到)
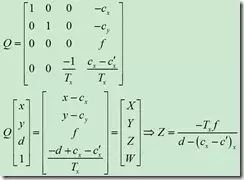
4.1 距離轉(zhuǎn)換公式
但是在實際操作過程中,用cvReprojectImageTo3D得到的數(shù)據(jù)并未如實際所想,生成深度矩陣所定義的世界坐標系我就一直沒弄清楚。這在下面的例子中會詳細說明,希望這方面的專家能幫忙解答一下:
圖4.2是測量時的實際場景圖,場景中主要測量的三個物體就是最前面的利樂包裝盒、中間的紙杯、和最遠的塑料瓶。

4.2. 實際場景中三個待測物體的位置
圖4.3是校準后的左右圖和匹配出來的disparity map,disparity窗口中是實際的點云,object窗口是給disparity map加了個閾值之后得到的二值圖,主要是為了分割前景和背景。可以看到要測的三個物體基本被正確地分割出來了
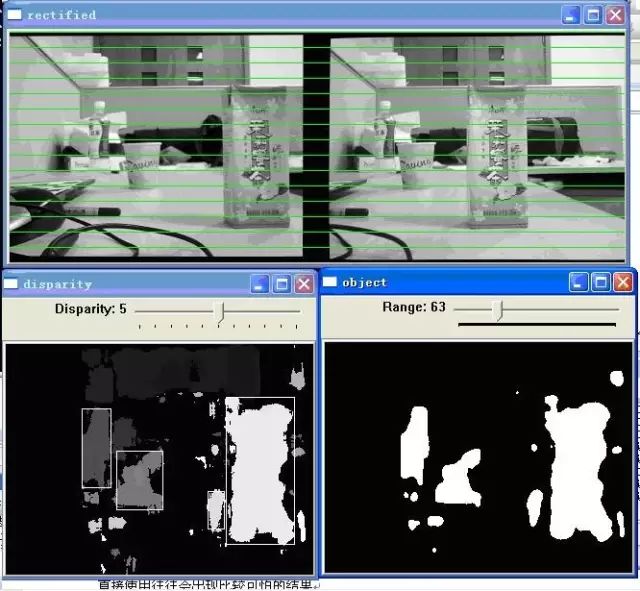
4.3. 雙目攝像頭得到的disparity map
圖4.4是在disparity窗口中選取一個點后然后在實際坐標矩陣中得到的對應(yīng)三維信息,在這里,我在三個物體的點云上各選一個點來代表一個物體實際的坐標信息。(這里通過鼠標獲取一點坐標信息的方法參考的是opencv sample里的watershed.cpp)
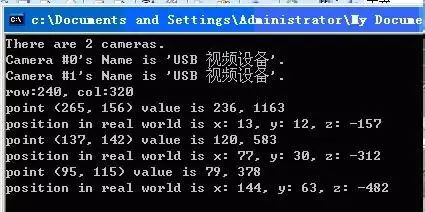
4.4. 對應(yīng)點的三維坐標
在這里可以看到,(265, 156)也就是利樂包裝盒的坐標是(13, 12, -157),(137, 142)紙杯的坐標是(77, 30, -312),(95, 115)塑料瓶的坐標是(144, 63, -482)。
補充一下:為了方便顯示,所以視差圖出來之后進行了一個0-255的normalize,所以value值的前一個是normalize之后點的灰度值,后一個是normalize之前點的實際視差圖。
由cvFindStereoCorrespondenceBM算法的源代碼:
dptr[y*dstep] = (short)(((ndisp - mind - 1 + mindisp)*256 + (d != 0 ? (p-n)*128/d : 0) + 15) >> 4);
其中
ndisp是ndisp = state->numberOfDisparities;
mindisp是mindisp = state->minDisparity;
mind就是sad得出的視差
實際視差大約是(64-mind-1)*256=1163, 基本是對的, 后面一項修正值在通常情況下可以忽略
目前我還是不是很清楚立體坐標系原點和尺度,但是從這三個點的z坐標可以大致看出這三個物體的距離差大概是13,基本與實際場景中物體的位置一致。因此,可以通過這種方法確定出物體的大致距離信息。
但是,如果就從攝像頭參數(shù)本身來測量距離的話,就不是很明白了,還求這方面的大牛解答。
5. 一些問題
5.1 關(guān)于StereoCalibrate
OpenCV自帶的cvStereoCalibrate感覺不怎么好用,用這個函數(shù)求出的內(nèi)參外參和旋轉(zhuǎn)平移矩陣進行校準,往往無法達到行對準,有時甚至?xí)霈F(xiàn)比較可怕的畸變。在看了piao的http://www.opencv.org.cn/forum/viewtopic.php?f=1&t=4603帖子之后,也曾經(jīng)嘗試過現(xiàn)用cvCalibrateCamera2單獨標定(左右各20幅圖),得出的結(jié)果基本和Matlab單獨標定的相同,然后再在cvStereoCalibrate中將參數(shù)設(shè)成CV_CALIB_USE_INTRINSIC_GUESS,用來細化內(nèi)參數(shù)和畸變參數(shù),結(jié)果得出的標定結(jié)果就又走樣了。
不知道有誰在這方面有過成功經(jīng)驗的,可以出來分享一下。畢竟用Matlab工具箱還是麻煩了些。
5.2Translation向量以及立體匹配得出的世界坐標系
Learning OpenCV中對于Translation和Rotation的圖示是這樣的
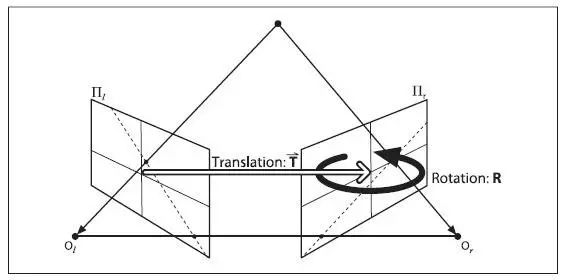
5.1. Learning OpenCV中的圖示
可是在實驗過程中發(fā)現(xiàn),如果將Translation向量按尺度縮放,對于StereoRectify之后的左右視圖不會有變化,比如將T = [ -226.73817 -0.62302 8.93984 ] ,變成T = [ -22.673817 -0.062302 0.893984 ],在OpenCV中顯示的結(jié)果不會有任何變化。而且我如果修改其中的一個參量的話,左右視圖發(fā)生的變化也不是圖5.1中所示的那種變化(比如把x縮小,那么視圖發(fā)生的變化不是往x軸方向的平移)。
因此又回到了老問題,這里這些坐標的尺度究竟是什么?通過ReprojectTo3D那個函數(shù)得到的三維坐標又是以哪個點為原點,那三個方向為x,y,z軸的?
補充: 對這個問題的解答來自于和maxwellsdemon的討論
他的解釋如下:rotation是兩者的旋轉(zhuǎn)角度的關(guān)系,但是你要把它矯正平行,也是需要translation matrix的。你可以設(shè)想,兩個看似已經(jīng)平行了的攝像頭,但是深度上放置的有差距,那么在矯正的時候會議translation matrix所對應(yīng)的角度或者直線為基準,二者旋轉(zhuǎn)一個小角度,使得完全平行。
審核編輯 :李倩
-
攝像機
+關(guān)注
關(guān)注
3文章
1596瀏覽量
60016 -
面板
+關(guān)注
關(guān)注
13文章
1675瀏覽量
53838 -
OpenCV
+關(guān)注
關(guān)注
31文章
634瀏覽量
41337
原文標題:攝像機標定和立體標定
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
簡易攝像機標定方法

基于攝像機標定的車輛速度檢測方法
一種基于Tsai法的攝像機改進標定法
基于OpenCV的單目攝像機標定
基于OpenCV的雙目攝像機標定
基于HALCON的雙目是相機立體視覺系統(tǒng)標定

機器視覺中的攝像機標定和自標定分析
基于梯形棋盤格標定板對激光雷達和攝像機聯(lián)合標定方法
單幅二維圖像的攝像機標定方法

機器視覺的攝像機標定技術(shù)你知道多少?
機器視覺中攝像機標定的目的是什么





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論