 鐵路轉轍機視覺高精度定位抓取,大幅提升了產線自動化、柔性化水平
鐵路轉轍機視覺高精度定位抓取,大幅提升了產線自動化、柔性化水平
近年來,隨著城市規模不斷擴大,城市交通擁堵問題凸顯,人們越來越多地選擇城市軌道交通作為日常出行工具。而城市軌道交通車輛速度不斷提升,列車的載重量和車輛行駛密度不斷增加,對軌道交通輔助設備的穩定、安全和維護等提出了更高的要求。
轉轍機設備作為實現道岔尖軌等轉換的關鍵設備,任何失效都會使列車無法正常運行,甚至可能造成列車掉軌、翻車等嚴重后果,帶來生命和財產的嚴重損失。因此,鐵路轉轍機的重要性不言而喻,人工搬運上料難度大,風險高,如何利用人工智能技術代替人力來進行鐵路轉轍機定位抓取上料,是鐵路局迫切需要解決的問題。
某鐵路局鐵路轉轍機視覺高精度定位抓取
項目背景:
鐵路轉轍機重量重,體積大,如果由傳統人工進行上料,工作強度非常大,需要部署多名工人進行重復性搬運。轉轍機在來回搬運的過程中容易產生磕碰,并造成工人工傷風險,增加人工成本,為了降本增效,客戶希望能通過自動化來進行改善。
項目難點:
1、工作臺來料狀態無序,工件尺寸和體積較大,難以用單相機拍攝整個工件;
2、后端對接裝配工藝對工件定位精度要求較高,表面反光增加了圖像識別定位的難度。
解決方案:
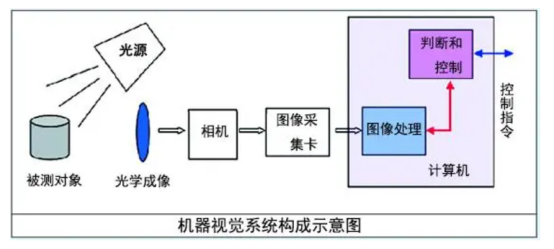
1、采用2D視覺多拍照點數據融合算法完成工件精準定位,通過單目相機分別拍攝工件表面的不同位置,對局部進行精定位;
2、自主開發多拍照點相機高精度標定算法,將不同拍照位置的數據進行融合,最終實現對整個工件的精準定位;
3、最后根據手眼標定結果將坐標轉化到機器人坐標系下,并通過TCP通信發給機器人對工件完成抓取。
方案優勢:
1、替代人工,高精度2D視覺大工件定位,既保證了較高的精度又降低了成本;
2、自研多拍照點數據融合算法,自主開發智能機械臂軌跡規劃算法,抓取成功率高達99%;
3、可24小時系統穩定運行。
該鐵路局引入富唯智能高精度視覺定位抓取系統進行鐵路轉轍機抓取上料,通過2D視覺進行精準定位,提供精準定位坐標給機器人,大幅提升了產線自動化、柔性化水平,保障上料精準性和安全性。
富唯智能立足客戶實際場景需求,可提供性能強大,靈活易用的視覺高精度定位抓取上下料方案,經過簡單調試和培訓即可快速實現所需功能,幫助廣大集成商伙伴順利交付,助力客戶實現高效、高質量生產。
審核編輯黃宇
-
機器人
+關注
關注
211文章
28501瀏覽量
207472 -
自動化
+關注
關注
29文章
5593瀏覽量
79401 -
定位
+關注
關注
5文章
1336瀏覽量
35413
發布評論請先 登錄
相關推薦
自動化新寵打開人機協同的未來,底層芯片如何賦能協作機器人發展?

比斯特點焊機如何提升電池生產線的自動化水平

生產線自動化革新:視覺上下料技術的精準應用與效率飛躍
制造業上自動化產線的RFID讀寫器與標簽的選型應用方案——選型流程
基于機器視覺的鐵路轉轍機精準定位與故障抓取自動化解決方案
從AGV到立庫,物流自動化的更迭與未來

愛普生的高精度傳感技術有助于監控自動化

機器視覺檢測技術在工業自動化中的應用
視覺控制器在工業自動化的應用
高性能纖維應變傳感器,實現可穿戴設備的柔性化、舒適化、便攜化

深圳恒興隆|自動換刀電主軸:實現加工自動化與高效化的關鍵.
高精度直線滑臺輕松應對工業自動化高難度挑戰





 工商網監
工商網監
評論