

1、添加頭文件
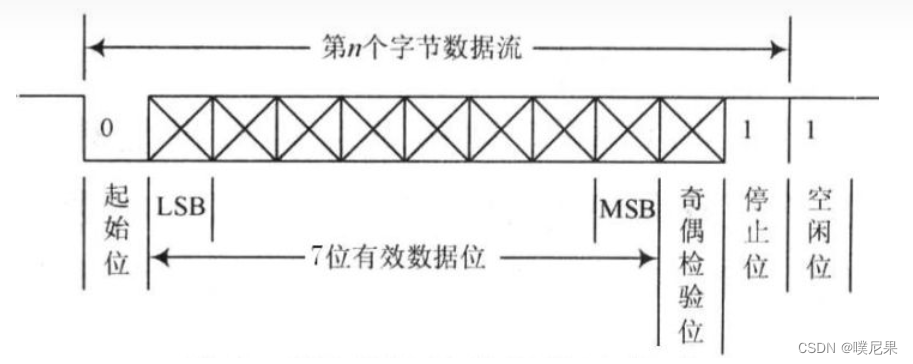
首先我們先添加相應(yīng)的頭文件。既然我們要進(jìn)行對(duì)串口的模擬,因此我們要先了解uart相關(guān)的通信協(xié)議。由于UART的通信方式是由1個(gè)起始位,8個(gè)數(shù)據(jù)位,包含一個(gè)奇偶校驗(yàn)位,和結(jié)束位構(gòu)成因此我們將使用單片機(jī)中的兩個(gè)普通的IO口電平的高低進(jìn)行對(duì)相應(yīng)時(shí)序的模擬。
#include"stm32f10x.h" #include"vuart2.h"
2、宏定義
使用到的io口為
#defineOI2_TXDPDout(6) #defineOI2_RXDPDin(7) #defineBuadRate2_9600104 #defineRecive2_Byte19//接收緩沖器的個(gè)數(shù) u8len2=0;//接收計(jì)數(shù) u8USART2_buf[Recive2_Byte];//接收緩沖區(qū)
將IO口相應(yīng)的位帶操作函數(shù)進(jìn)行宏定義從而使得在對(duì)不同的電平的進(jìn)行轉(zhuǎn)換的時(shí)候更為方便,并且減少了調(diào)用其他函數(shù)的過(guò)程所消耗的時(shí)間,程序執(zhí)行效率更高。
在本次的傳輸過(guò)程中我選用的是使用波特率速率為9600,也就是1s中發(fā)送9600個(gè)字節(jié),因此對(duì)每個(gè)字節(jié)數(shù)據(jù)進(jìn)行計(jì)算1000000us/9600可以得出,發(fā)一個(gè)字節(jié)的數(shù)據(jù)需要進(jìn)行大概需要 104.16us并且對(duì)于相應(yīng)的電平持續(xù)時(shí)間要求誤差不能超過(guò)±5%因此對(duì)我們進(jìn)行時(shí)間的控制要求就顯得比較重要了。
3、枚舉出各個(gè)位
enum{
COM_START_BIT,
COM_D0_BIT,
COM_D1_BIT,
COM_D2_BIT,
COM_D3_BIT,
COM_D4_BIT,
COM_D5_BIT,
COM_D6_BIT,
COM_D7_BIT,
COM_STOP_BIT,
};
u8recvStat2=COM_STOP_BIT;
u8recvData2=0;
4、IO——TXD進(jìn)行模擬
voidIO2_TXD(u8Data)
{
u8i=0;
OI2_TXD=0;
delay_us(BuadRate2_9600);
for(i=0;i>1;
}
OI2_TXD=1;
delay_us(BuadRate2_9600);
}
由于發(fā)送的信號(hào)是將TXD信號(hào)進(jìn)行拉低處理,因此在拉低TXD相應(yīng)的IO口之后進(jìn)行延時(shí)處理,再進(jìn)行循環(huán)對(duì)我們需要發(fā)送的各個(gè)位的數(shù)據(jù)繼續(xù)進(jìn)行發(fā)送循環(huán)發(fā)送完成之后將電平拉高代表停止位。
5、構(gòu)建發(fā)送函數(shù)
voidUSART2_Send(u8*buf,u8len2)
{
u8t;
for(t=0;t
其中的*buf為需要發(fā)送的數(shù)據(jù),len2為數(shù)據(jù)長(zhǎng)度,進(jìn)行循環(huán)調(diào)用IO_TXD進(jìn)行一個(gè)字節(jié)一個(gè)字節(jié)的數(shù)據(jù)發(fā)送。
6、IO口初始化
voidIO2Config(void)
{
GPIO_InitTypeDefGPIO_InitStructure;//初始化gpio
NVIC_InitTypeDefNVIC_InitStructure;//中斷初始化函數(shù)
EXTI_InitTypeDefEXTI_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOD|RCC_APB2Periph_GPIOC,ENABLE);//使能PD,PC端口時(shí)鐘
//SoftWareSerialTXD
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;//選擇io口6
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//推挽輸出
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//IO口速度為50MHz
GPIO_Init(GPIOD,&GPIO_InitStructure);
GPIO_SetBits(GPIOD,GPIO_Pin_6);//TXD默認(rèn)電平拉高
//SoftWareSerialRXD
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOD,&GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOD,GPIO_PinSource7);//對(duì)D7的下降沿進(jìn)行中斷采樣,當(dāng)接收到下降沿時(shí)代表接收到數(shù)據(jù)觸發(fā)中斷處理函數(shù)
EXTI_InitStruct.EXTI_Line=EXTI_Line7;//用到了中斷7
EXTI_InitStruct.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger=EXTI_Trigger_Falling;//下降沿觸發(fā)中斷
EXTI_InitStruct.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStruct);//初始化中斷
NVIC_InitStructure.NVIC_IRQChannel=EXTI9_5_IRQn;//中斷發(fā)生于9-5的中斷之中
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
7、定時(shí)器初始化
voidTIM5_Int_Init(u16arr,u16psc)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStructure;
NVIC_InitTypeDefNVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE);//時(shí)鐘使能
//定時(shí)器TIM5初始化
TIM_TimeBaseStructure.TIM_Period=arr;//設(shè)置在下一個(gè)更新事件裝入活動(dòng)的自動(dòng)重裝載寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler=psc;//設(shè)置用來(lái)作為T(mén)IMx時(shí)鐘頻率除數(shù)的預(yù)分頻值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;//設(shè)置時(shí)鐘分割:TDTS=Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;//TIM向上計(jì)數(shù)模式
TIM_TimeBaseInit(TIM5,&TIM_TimeBaseStructure);//根據(jù)指定的參數(shù)初始化TIMx的時(shí)間基數(shù)單位
TIM_ClearITPendingBit(TIM5,TIM_FLAG_Update);
TIM_ITConfig(TIM5,TIM_IT_Update,ENABLE);//使能指定的TIM5中斷,允許更新中斷
//中斷優(yōu)先級(jí)NVIC設(shè)置
NVIC_InitStructure.NVIC_IRQChannel=TIM5_IRQn;//TIM5中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//先占優(yōu)先級(jí)1級(jí)
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;//從優(yōu)先級(jí)1級(jí)
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;//IRQ通道被使能
NVIC_Init(&NVIC_InitStructure);//初始化NVIC寄存器
}
對(duì)TIM5進(jìn)行初始化操作使得定時(shí)器可以檢測(cè)到各個(gè)位的電平持續(xù)性時(shí)間從而對(duì)接收到的數(shù)據(jù)進(jìn)行分析。計(jì)時(shí)結(jié)束后進(jìn)入中斷TIM5處理。
8、外部中斷處理函數(shù)
voidEXTI9_5_IRQHandler(void)
{
if(EXTI_GetFlagStatus(EXTI_Line7)!=RESET)//對(duì)中斷標(biāo)志位進(jìn)行采集
{
if(OI2_RXD==0)
{
if(recvStat2==COM_STOP_BIT)
{
recvStat2=COM_START_BIT;//將當(dāng)前的狀態(tài)設(shè)置為開(kāi)始位
TIM_Cmd(TIM5,ENABLE);//開(kāi)啟定時(shí)器計(jì)數(shù)
}
}
EXTI_ClearITPendingBit(EXTI_Line7);//清除中斷標(biāo)志
}
}
9、定時(shí)器中斷處理函數(shù)
voidTIM5_IRQHandler(void)
{
if(TIM_GetFlagStatus(TIM5,TIM_FLAG_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM5,TIM_FLAG_Update);//清除中斷標(biāo)志位
recvStat2++;//將位置移動(dòng)到第一位的數(shù)據(jù)
if(recvStat2==COM_STOP_BIT)//當(dāng)運(yùn)行到停止位時(shí)進(jìn)入
{
TIM_Cmd(TIM5,DISABLE);//停止tim5
USART2_buf[len2++]=recvData2;//將采集到的各個(gè)數(shù)據(jù)傳遞給USART2_buf
if(len2>Recive2_Byte-1)//將數(shù)據(jù)通過(guò)回顯到串口調(diào)試助手中
{
len2=0;
USART2_Send(USART2_buf,Recive2_Byte);
}
return;
}
if(OI2_RXD)//采集RXD各個(gè)電平
{
recvData2|=(1<
整體代碼
vuart2.c
#include"stm32f10x.h"
#include"vuart2.h"
/**
*軟件串口的實(shí)現(xiàn)(IO模擬串口)
*波特率:9600 1-8-N
*TXD:PD6
*RXD:PD7
*使用外部中斷對(duì)RXD的下降沿進(jìn)行觸發(fā),使用定時(shí)器5按照9600波特率進(jìn)行定時(shí)數(shù)據(jù)接收。
*Demo功能:接收11個(gè)數(shù)據(jù),然后把接收到的數(shù)據(jù)發(fā)送出去
*/
#defineOI2_TXDPDout(6)
#defineOI2_RXDPDin(7)
#defineBuadRate2_9600104
#defineRecive2_Byte19//接收緩沖器的個(gè)數(shù)
u8len2=0;//接收計(jì)數(shù)
u8USART2_buf[Recive2_Byte];//接收緩沖區(qū)
enum{
COM_START_BIT,
COM_D0_BIT,
COM_D1_BIT,
COM_D2_BIT,
COM_D3_BIT,
COM_D4_BIT,
COM_D5_BIT,
COM_D6_BIT,
COM_D7_BIT,
COM_STOP_BIT,
};
u8recvStat2=COM_STOP_BIT;
u8recvData2=0;
voidIO2_TXD(u8Data)
{
u8i=0;
OI2_TXD=0;
delay_us(BuadRate2_9600);
for(i=0;i>1;
}
OI2_TXD=1;
delay_us(BuadRate2_9600);
}
voidUSART2_Send(u8*buf,u8len2)
{
u8t;
for(t=0;tRecive2_Byte-1)
{
len2=0;
USART2_Send(USART2_buf,Recive2_Byte);
}
return;
}
if(OI2_RXD)
{
recvData2|=(1<
vuart2.h
#ifndef__VUART2__H
#define__VUART2__H
#include"stm32f10x.h"
voidIO2_TXD(u8Data);
voidUSART2_Send(u8*buf,u8len);
voidIO2Config(void);
voidTIM5_Int_Init(u16arr,u16psc);
#endif
審核編輯:湯梓紅
-
單片機(jī)
+關(guān)注
關(guān)注
6061文章
44854瀏覽量
645817 -
通信
+關(guān)注
關(guān)注
18文章
6158瀏覽量
137290 -
STM32
+關(guān)注
關(guān)注
2288文章
10996瀏覽量
361888 -
串口
+關(guān)注
關(guān)注
14文章
1581瀏覽量
78488 -
uart
+關(guān)注
關(guān)注
22文章
1254瀏覽量
103087
原文標(biāo)題:STM32 模擬串口(UART)使用!
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
uart是什么意思?認(rèn)識(shí)uart串口
串口通信的原理,IO口模擬UART串口通信
【CubeIDE】STM32 HAL庫(kù)史上最詳細(xì)教程(一):UART串口收發(fā)

【STM32學(xué)習(xí)筆記】串口通訊 — USART / UART
STM32F407的串口UART 基礎(chǔ)配置STM32CubeMX
基于STM32之UART串口通信協(xié)議(一)詳解
stm32使用IO模擬串口
STM32F103VE USART & UART串口通信
STM32 HAL庫(kù) UART 串口讀寫(xiě)功能筆記
單片機(jī)IO口模擬UART串口通信
AN4457_基于STM32F4xx系列單片機(jī)軟件模擬UART的設(shè)計(jì)實(shí)現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論