 DB-MGT型大小鼠步態實時檢測分析處理系統
DB-MGT型大小鼠步態實時檢測分析處理系統
簡單介紹
北京智鼠多寶品牌大小鼠步態(gait)是指大小鼠行走時所表現的姿態。大小鼠步態分析系統基于原有足跡分析方法(footprint analysis),運用新技術對足印分析法進行了改進,通過足印圖像增強技術采用高速攝像機可以清晰地采集大小鼠行走過程的足印信息,然后利用步態分析系統自動識別分析大小鼠足跡的步行周期、支撐距離、支撐時長、擺動時長、制動時長、推進時長、步頻等60余種指標,以此客觀、準確和**地反映動物步態的變化情況。而且本步態分析系統集數據采集、監測、分析、統計處理、繪圖制表、打印輸出于一體,避免繁重的人工勞動,極大提高實驗的自動化程度。
產品描述
一、系統構成
1.硬件構成
其硬件系統主要包括:1視頻采集分析計算機(1臺)、2老鼠步行通道、3高速攝像機、4足跡增強板、5背景增強系統等等。圖1 為步態分析系統原理機事物圖片。

圖1 步態實時檢測分析處理系統原理機實物圖
2.軟件展示
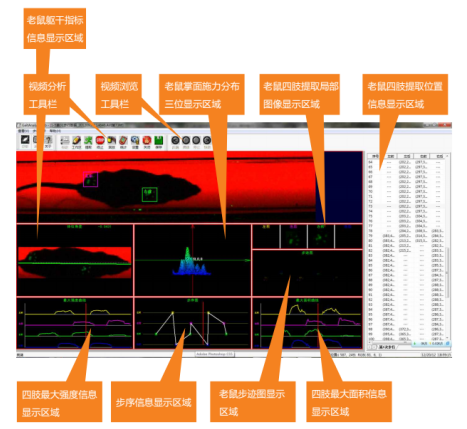
步態實時檢測分析處理系統主界面
二、指標評價體系
1步行周期動物行走時一側足跟著地到該側足跟再次著地的過程被稱為一個步行周期,一個步行周期可分為支撐相(stance phase)和擺動相(swing phase)
2支撐時長在一個步行周期中始終與地接觸的階段
3擺動時長在一個步行周期中始終與地無接觸的階段
4支撐時相支撐時長所占步態周期的百分數(cycle%)作為單位來表達。
5單支撐時相通常指一足著地到該足離地的過程。
6雙支撐時相在一個步行周期中產生的雙足同時著地的階段。
7三支撐時相在一個步行周期中產生的三足同時著地的階段
8擺動時相擺動時長所占步態周期的百分數(cycle%)作為單位來表達
9制動時長從該足開始接觸時刻到該足與地面*大接觸面積時刻所需的時長
10制動指數制動時長/支撐時長
11推進時長從該足與地面*大接觸面積時刻到該足離地時刻所需的時長
12推進指數推進時長/支撐時長
13同源協調性被觀測足爪(RH or LH)的擺動時間或支撐時間與對照足爪(LH or LF)的步行周期的比值
14同側協調性被觀測足爪(RH or LH)的擺動時間或支撐時間與對照足爪(RF or LF)的步行周期的比值
15對側協調性被觀測足爪(RH or LH)的擺動時間或支撐時間與對照足爪(LF or RF)的步行周期的比值
16步幅動物在一個步行周期中,同一前肢或后肢連續兩個*大腳印橫坐標中點之間的距離
17左側步基動物在一個步行周期中,左前肢連續兩個*大腳印橫坐標中點與左后肢連續兩個*大腳印橫坐標中點之間的距離
18右側步基同上
19前肢步寬在行走中左、右兩足間的距離稱為步寬,通常以足爪中點為測量參考點
20后肢步寬同上
21足跡*大面積:t為足爪接觸地面的*大面積時刻,*大面積計算公式為:
22足跡平均面積:每幀圖像足跡面積之和/總幀數
23足跡*大強度:t為足爪接觸地面的*大強度時刻,同理*大面積的計算方法:
24足跡平均強度:每幀圖像足跡強度之和/總幀數
25擺動速度:步長/擺動時間
26瞬時速度:每只爪子的步長/步行周期
27平均速度:在一次行走過程中瞬時速度的平均值
28總速度:在一次行走過程中,步長的總和/步長周期的總和
29足角:在行走中前進的方向(體中線)與足的長軸所形成的夾角稱為足角
30平均體轉角老鼠嘴尖與尾根形成的軸線的方向和正前方向軸之間的夾角的平均值。比如老鼠移動的方向偏離正前方向5°
31體轉角標準偏差 老鼠嘴尖與尾根形成的軸線方向和正前方向軸之間的夾角的標準偏差。比如如果老鼠的平均體轉角為5°,標準偏差為3°,那么代表動物有在2-8°的范圍內運動的趨勢
32平均側向移動動物質量中心延Y軸側向移動的距離
33側向移動標準偏差動物質量中心延Y軸側向移動的標準偏差
審核編輯黃宇
-
處理系統
+關注
關注
0文章
93瀏覽量
16680 -
實時檢測
+關注
關注
0文章
13瀏覽量
10592
發布評論請先 登錄
相關推薦
紫外線光譜分析與應用 紫外線水處理系統的工作原理
步態監測方案首次亮相ICMD秋季展,促進個體化步態矯正朝高水平進階
大小鼠也需要跑步機——ZL-013小動物實驗跑步機
簡儀高性能平臺在小鼠腦電波實驗中的應用

信號采集與處理系統通常由哪些模塊組成
Profibus轉Modbus網關在智能化水處理系統優化改造的應用
基于FPGA的實時邊緣檢測系統設計,Sobel圖像邊緣檢測,FPGA圖像處理
基于MATLAB的信號處理系統與分析
一種手掌大小的氣體傳感器和分析儀,可實時檢測多種有毒氣體

通過大小鼠無創血壓測量實驗明白了無創血壓測量技術的重要性
在全志V853平臺上成功部署深度學習步態識別算法
晶振在視覺處理系統中的運作及作用






 工商網監
工商網監
評論