 SystemVerilog中線程常用的精細化控制方法
SystemVerilog中線程常用的精細化控制方法
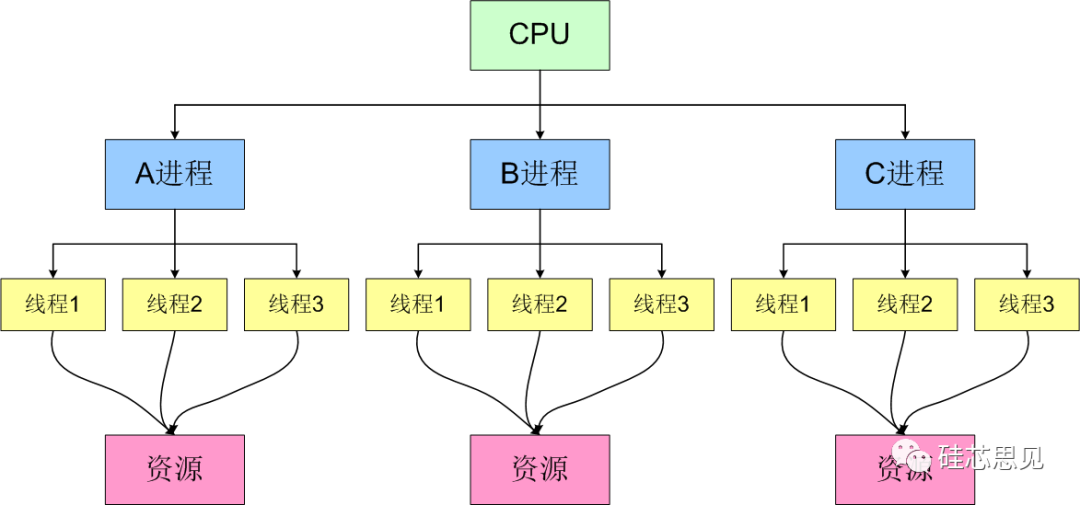
在計算機中存在進程和線程的概念,其中進程是并發執行的程序在執行過程中分配和管理資源的基本單位,線程是進程的一個執行單元,是比進程還要小的獨立運行的基本單位。在一個程序中至少有一個進程,一個進程至少有一個線程。進程是資源分配最小單位,線程是程序執行的最小單位。
計算機在執行程序時,會為程序創建相應的進程,進行資源分配時,是以進程為單位進行相應的分配。每個進程都有相應的線程,在執行程序時,實際上是執行相應的一系列線程,過程如下圖所示。
在SystemVerilog中,雖然IEEE中也使用了process和thread,但是在實際手冊解釋的過程中,兩個概念基本上處于互用的狀態,所以本文統一使用線程進行描述說明SystemVerilog中線程常用的精細化控制方法。
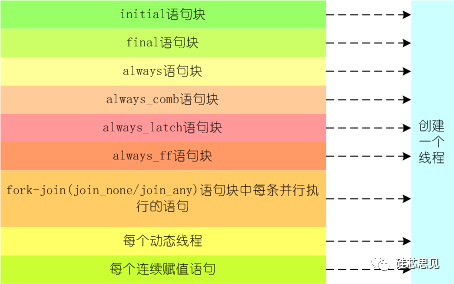
在SystemVerilog中,線程的創建主要有以下幾種方式:
?每一個initial結構都會創建一個對應的線程;
?每一個final結構都會創建一個對應的線程(關于final用法參考《SystemVerilog中的final是怎么結束的》);
?每一個always、always_comb、always_latch和always_ff結構都會創建對應的線程;
?fork-join(join_any/join_none)結構中每條并行執行的語句塊;
?每一個動態線程,一般并行執行的線程并且不會阻塞其他線程或者task中其他語句執行的線程;
?每一個連續賦值語句;
在SystemVerilog中可以通過process來實現對于上述線程的控制,而這個process其實是SystemVerilog中的一個內建類,通過該類聲明的句柄可以指向特定的線程,從而可以通過該句柄實現對于指向線程的訪問控制。process類在SystemVerilog中的定義如下:
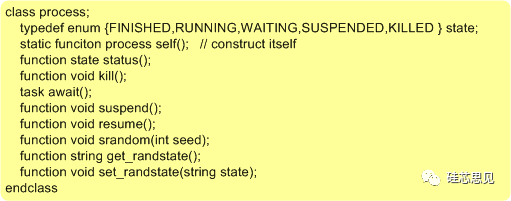
雖然process是一個類,但是這哥們比較特殊,不能被拓展派生,也就是說process不會有子類的,并且該類在創建對象時,是不能使用new函數的,process類型句柄指向對象是通過process::self()完成的,因此如果用戶需要通過process句柄指向對應的線程時需要在對應的線程中調用process::self()實現。在process中經常用來實現對于線程控制的方法主要如下:
?self()返回指向當前線程的句柄;
?status()返回當前句柄指向線程的狀態(包含的狀態有:FINISHED、RUNNING、WAITING、SUSPEND和KILLED等狀態);
?kill()終止當前句柄指向的線程及其開啟的所有子線程;
?await()等待調用其的句柄指向的線程執行完成,注意不能在調用其的句柄指向的線程中使用該方法,只能在別的線程中調用該方法用以阻塞調用該方法的句柄指向的線程;
?suspend()掛起當前句柄指向線程;
?resume()恢復被掛起的線程;
?srandom()設置線程的隨機種子;
上述方法中,kill()、await()、suspend()、resume()只能用于initial、always和fork結構啟動的線程。下面將針對process中這些方法的使用進行示例說明。
【示例】
【仿真結果】
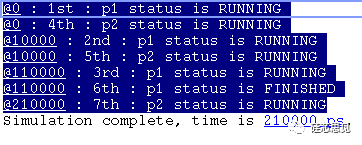
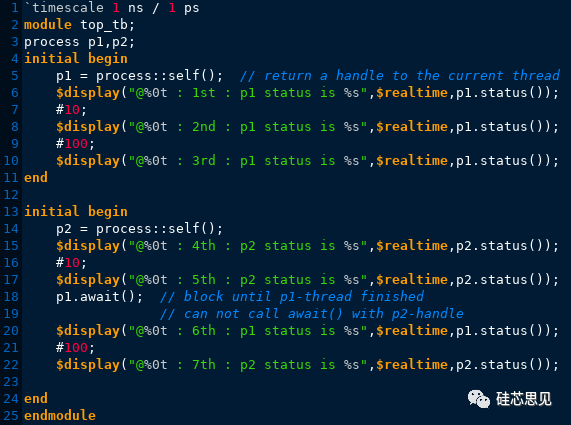
示例中,首先聲明了兩個句柄p1和p2,在兩個initial結構中,p1和p2通過調用“process::self()”實現p1和p2分別指向其所在的initial結構開啟的線程。
在第一個initial結構中“@0”時刻第一個$display中通過p1.status()方法獲取了當前線程的狀態(log中顯示為RUNNING),然后等待10個時間單位后,再次調用$display(),在其中調用p1.status()方法獲取了當前線程時刻“@10”的狀態(log中顯示為RUNNING),再經過100個時間單位,在時刻@110再次在$display()中調用p1.status()方法獲取了當前線程的執行狀態(log中顯示為RUNNING),該語句執行完后第一個initial結構開啟的線程執行完畢。
第二個initial結構中,“@0”時刻第一個$display中通過p2.status()方法獲取了當前線程的狀態(log中顯示為RUNNING),然后等待10個時間單位后,再次調用$display(),在其中調用p2.status()方法獲取了當前線程時刻“@10”的狀態(log中顯示為RUNNING),然后通過p1調用await()方法,p1.await()后的語句將處于等待p1指向線程執行完畢,其后的語句此時處于阻塞的狀態,當p1指向的線程(也就是第一個initial結構)在時刻“@110”執行完畢,p1.await()不再阻塞其后語句的執行,其后的語句繼續執行,此時調用p1.status()顯示的值為p1當前的狀態(log中顯示此時p1狀態位FINISHED)。在等待100個時間單位,在時刻“@210”調用p2.status()時,p2指向的線程還沒有執行完畢,所以其顯示的狀態仍為RUNNING。上述兩個線程執行的過程如下圖所示。

【示例】
【仿真結果】
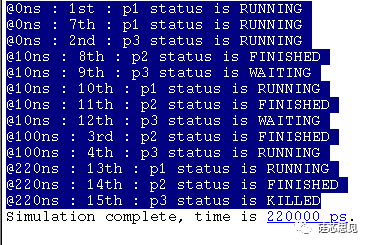
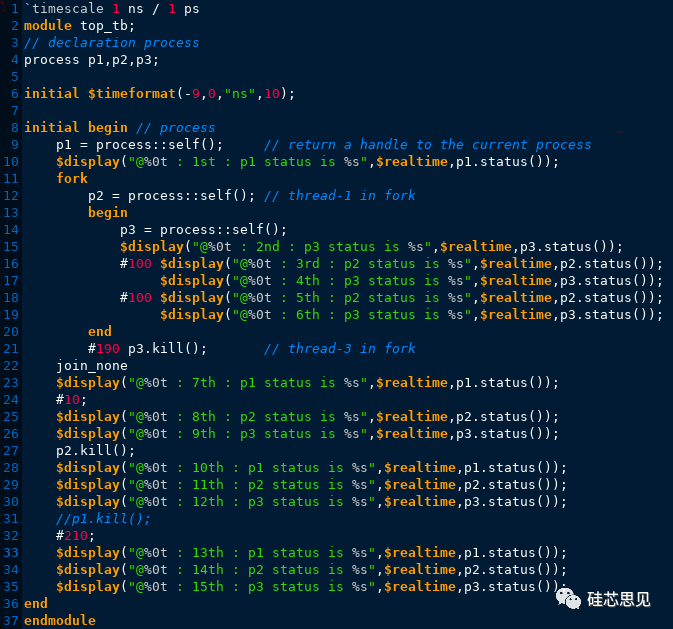
示例中,聲明了三個process句柄p1、p2和p3.在initial結構中調用“process::self()”實現p1指向當前的initial結構開啟的線程,然后調用$display語句通過p1.status()獲取當前initial結構開啟線程的執行狀態為RUNNING(該initial結構正在執行中)。
fork-join_none結構中所有語句是并行執行的,示例中的fork結構中一共有三個線程,
第一個線程通過調用“process::self()”實現p2指向自己,當該方法結束后,該線程的歷史使命也就結束了,這里需要注意p2并沒有指向fork。
第二個線程為一個begin-end結構,在begin-end中首先通過調用“process::self()”實現了p3指向該線程,然后調用$display中通過p3.status()獲取當前線程執行狀態為RUNNING(該begin-end結構還在執行中),在等待100個時間單位,通過p2.status()和p3.status()獲取當前時刻p2和p3指向線程的執行狀態,因為p2指向的線程在調用“process::self()”完后就執行完了,所以p2.status()返回的狀態位FINISHED,p3.status()獲取的狀態值仍為RUNNING(其所指向begin-end結構還在執行中),再等待100個時間單位,通過p2.status()和p3.status()獲取當前時刻p2和p3指向線程的執行狀態,因為此時fork-join_none中并行執行的第三個線程通過p3調用了kill()方法,所以begin-end結構對應的線程被kill掉,因此此時企圖在等待100個時間單位再次獲取p2和p3執行狀態的語句不會執行。
第三個線程為等待190個時間單位后調用p3.kill(),實現了對于fork-join_none中第二個線程的kill操作。
fork-join_none結構后通過p1.status()獲取p1指向線程的執行狀態為RUNNING(因為p1指向的initial結構正在執行中);
在經過10個時間單位,通過p2.status()和p3.status()獲取當前時刻p2和p3指向線程的執行狀態分別為FINISHED(p2指向線程已經執行完畢)和WAITING(p3指向線程正在執行其中#100,處于延遲阻塞等待狀態);
通過p2.kill()企圖kill掉p2指向的線程,實際上此時p2指向的線程已經執行完畢,所以并不會影響p2指向線程的狀態,所以此時在p2.kill()后通過p2.status()和p3.status()獲取當前時刻p2和p3指向線程的執行狀態仍為FINISHED(p2指向線程已經執行完畢)和WAITING(p3指向線程還在執行其中#100,處于延遲阻塞等待狀態);
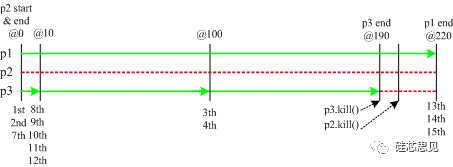
在經過210個時間單位,通過p1.status()、p2.status()和p3.status()獲取當前時刻p1、p2和p3指向線程的執行狀態為RUNNING(p1指向的initial結構正在執行中)、FINISHED(p2指向線程已經執行完畢)和KILLED(p3指向的線程執行完之前,在fork-join_none結構中等待190個時間單位時已經被kill掉了,所以此時狀態位KILLED);上述線程執行過程如下圖所示。
【示例】
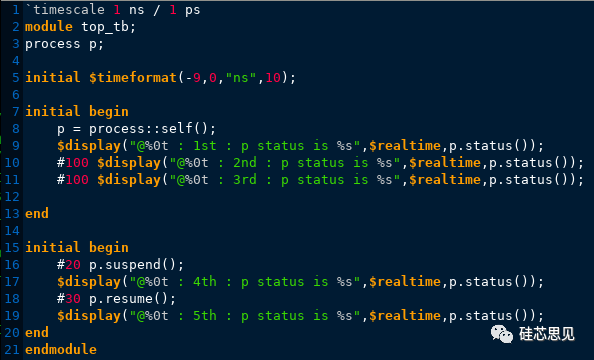
【仿真結果】
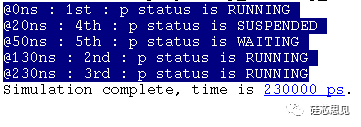
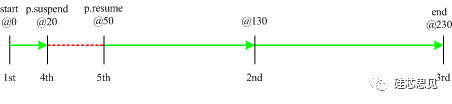
示例中,p通過“process::self()”指向了當前的線程,通過$display顯示了p.status()為RUNNING,等待100個時間單位,企圖通過p.status()顯示p的狀態,但是在這100個時間單位等待到其中的20個時間單位時,另外一個initial結構中仿真開始等待的20個時間單位后調用了p.suspend(),即此時將p指向的線程掛起,所以此時p指向的線程這時處于掛起等待狀態,$display顯示了p.status()為SUSPEND,在再等待30個時間單位,調用p.resume()將之前掛起的p指向的線程返回,因為當前線程并未阻塞,所以當前線程繼續執行,$display顯示了p.status()為WAITING,當前initial執行完后,p指向的線程再次開始繼續之前暫停的執行。
再等待80個時間單位(之前100個時間單位計時20個時間單位后還剩下80個時間單位未計時)調用$display顯示了p.status()為RUNNING,再等待100個時間單位后調用$display顯示了p.status()仍為RUNNING。上述線程執行過程如下圖所示。
通過示例可以看到,await是用來等待一個線程執行完成后返回的,而suspend則用來將一個線程手動掛起,其解除必須通過resume()來完成,并不一定要等到線程執行完畢。
上述通過示例展示了process中常用方法的使用,其實在UVM中對于線程的控制大多都是通過process完成的,如下例中run_phase的執行。
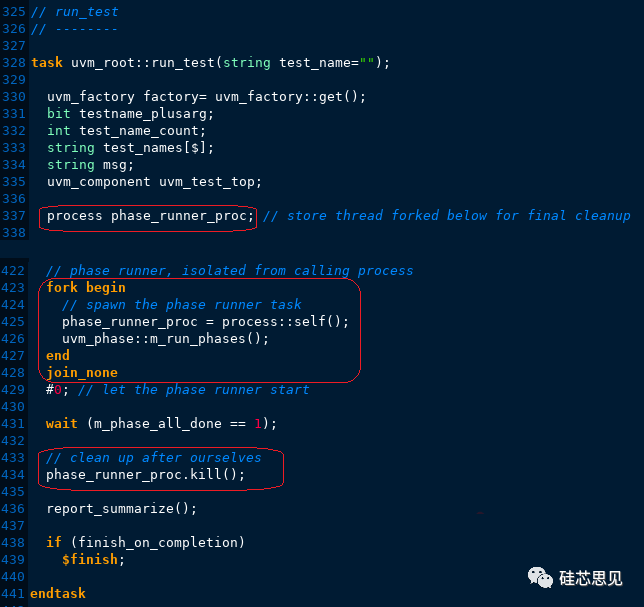
當我們執行run_test時,實際上在run_test這個task中聲明了一個process句柄phase_runner_proc,這個句柄在425行通過“process::self()”指向了當前fork-join_none結構中的一個線程,這個線程就是fork-join_none中的begin-end。當后續的m_run_phases()執行完成后,wait等到了m_phase_all_done拉高,表明當前的run_phases執行完畢,然后通過phase_runner_proc.kill()將fork-join_none中開啟的線程及其所有子線程都kill掉,相當于打掃戰場,從而通過process實現了對于fork-join_none中線程及其所有子線程的控制操作。
審核編輯:劉清
-
計算機
+關注
關注
19文章
7488瀏覽量
87852 -
Verilog
+關注
關注
28文章
1351瀏覽量
110077 -
UVM
+關注
關注
0文章
182瀏覽量
19167
原文標題:進程(線程)精細化控制中方法的使用
文章出處:【微信號:處芯積律,微信公眾號:處芯積律】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
2010年迪拜精細化工展
2010迪拜精細化工展/中東化工技術機械展
怎么才能讓無線站點實現精細化覆蓋?
實用精細化工辭典
精細化工常用原材料手冊

無線站點精細化覆蓋
如何才能實現smt貼片車間的精細化管理
福斯特、光華科技、西隴科學上榜2020中國精細化工百強企業榜單
基于TransModeler軟件的精細化交通設計
進程(線程)精細化控制中方法的使用
淺談數據中心精細化建設策略分析

綜合管廊精細化節能系統設計與實施





 工商網監
工商網監
評論