
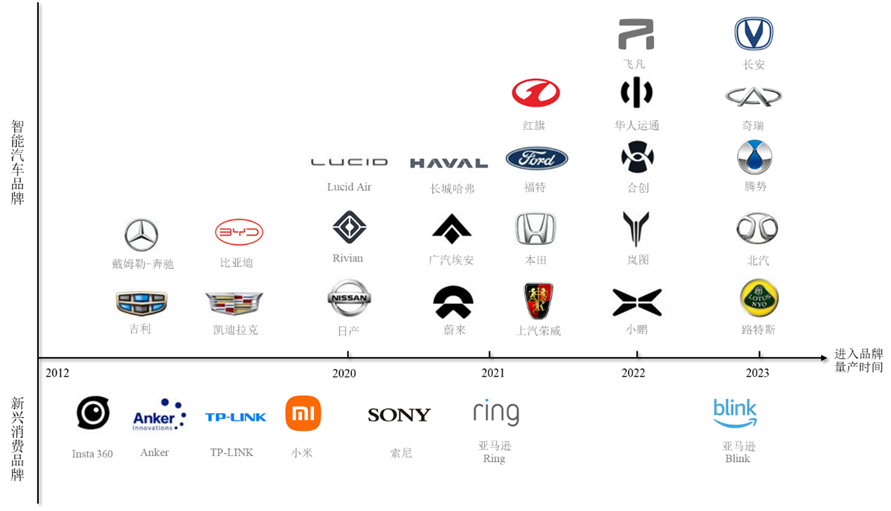
隨著移動互聯網、物聯網、人工智能等與現代光學制造技術、信息、通信、半導體技術的高度融合,汽車智能網聯化也獲得了高速發展。通過加載先進的車載鏡、傳感器、控制器、執行器,實現了環境感知、停車位檢測、目標識別、泊車路徑規劃、緊急制動、剎車輔助等全新智能化功能,帶來用戶更好的駕駛體驗。
雷達、攝像頭等傳感器是ADAS的核心部件之一,前者是通過深度圖和點云的方式來實現對目標物體的探測和識別,后者則是以圖像視覺的方式來對目標進行捕捉,兩者的有效結合能極大提高對周圍環境感知力。早期文章中有介紹Ansys Zemax+Speos的激光雷達的仿真案例,在接下來的文章中,筆者會重點圍繞CMS(電子后視鏡),運用Zemax和Speos來進行車載鏡頭的聯合仿真中的核心問題點做相關闡述。
核心問題一:CMS透鏡設計和優化
CMS電子后視鏡分為內鏡和外鏡,是由攝像頭和顯示屏組成,用來實現對后方、側面視野的捕捉和監控。其中攝像頭的作用是實現對環境的監測,捕捉到的圖像經過信號轉化和后處理后可以在顯示屏上顯示,配合其他前視或者側視的車載鏡頭最終可實現環視效果。過大的視場角造成鏡片工藝難度加大,最終影響了制造成本,這也是為什么當下較成熟的CMS攝像頭通常在90°到130°的原因。基于以上分析如何實現多車道大角度范圍監控、識別更遠的車牌、提升夜視效果、擁有更高性能的同時降低成本是行業趨勢。
綜合考慮車載鏡頭的大視場角的使用場景、鏡頭系統尺寸、后截距大于焦距的設置等因素,本例中的車載鏡頭初始結構可以設置為反遠攝物鏡的系統。
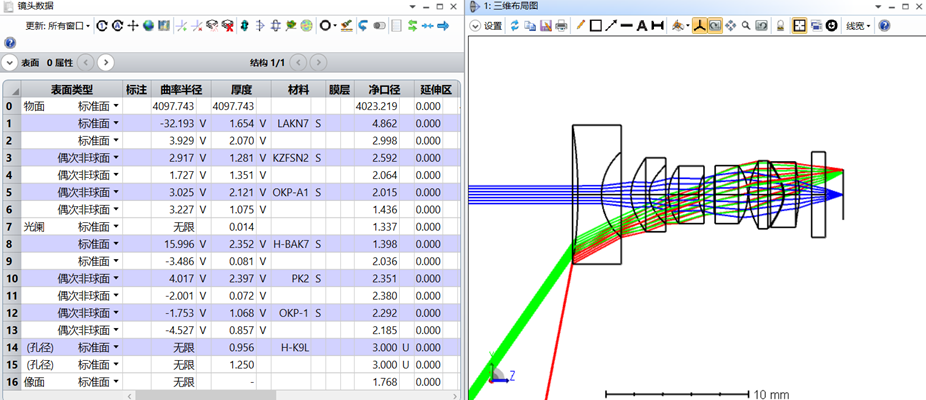
圖1 初始結構
該系統前組件為大光焦度負的彎月型透鏡作為負透鏡,后組件為正光焦度主要存在色差和場曲。因此可以采用雙膠合結構,通過提高高冕牌玻璃折射率,降低火石玻璃折射率來實現。最終通過調整前后組件和光闌相對應位置以及透鏡曲率半徑的非球面系數,得到一個系統參數:F#1.8,焦距1.9mm,FOV為158°,空間頻率140lp/mm時全視場大于0.3的光學系統。
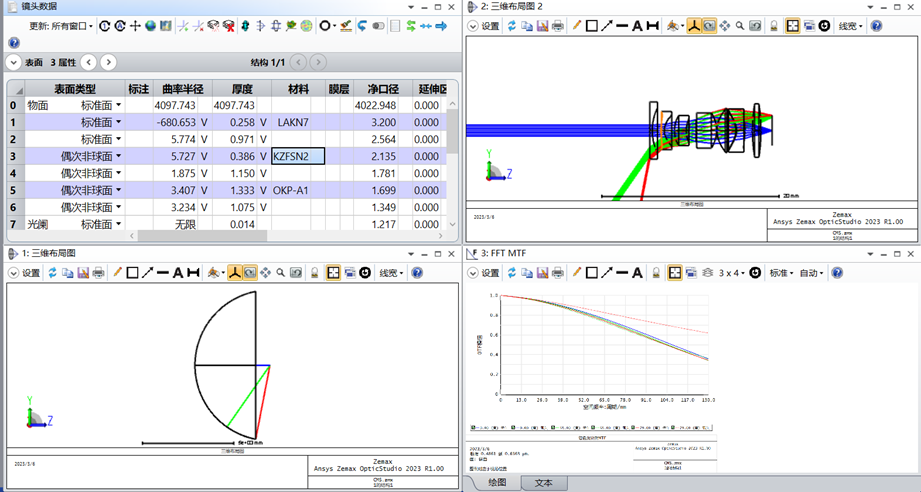
圖2 優化后
核心問題二:雜散光分析
光學系統主要分為兩類:一種是成像光學系統,另一種是非成像光學系統。針對成像光學系統,任何但經過光學系統傳播后到像面的非成像光線都稱為雜散光;而對非成像光學系統,任何成像或其它非預期的光線傳播形成的光斑等為雜散光。通常雜散光的來源有三種:其一,外部系統引入的光源,比如太陽光、環境反射或者漫反射的光源,外部系統光源進入光學系統后會發生多次的折射、反射以及衍射最終進入到成像像面;其二是系統自身的機械構件會發生熱輻射,從而在紅外熱成像系統中會形成雜散光;其三光線進入光學系統中發生多次折反射,形成多個次光源,最終在像面上匯聚或者發散。
因此,在進行光學產品設計時,如果環境因素、自身熱輻射過強,光線在系統中折返次數過多時,一定會降低光線系統的成像質量。如何控制、減弱雜散光的影響是一個重要的光學課題。Ansys Speos中可以通過開啟LightExpert模式,Light Expert - Reverse Tracing 逆向追跡分析法、Sequence Detection 序列探測法、Surface Contribution 面貢獻率分析法,針對導入的透鏡組的實體模型,在仿真結果里可以針對特定區域開啟光線追擊,來分析穿過特定鏡面的光線能量分布和貢獻率,以及其對應的序列路徑。在完成光路分析后,設計師可以用過增加膜層結構、遮光結構等方法來實現對雜散光的抑制。
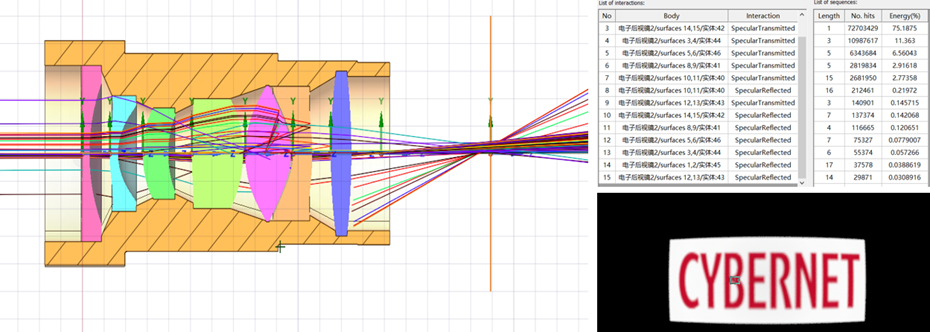
圖3 雜散光分析
核心問題三:成像的可視化仿真
實際應用中,只考慮像差或者雜散光對于分析車載鏡頭的成像功能來說是不夠的。當光線穿過鏡頭并進入圖像傳感器,傳感器捕捉光照強度并將光信號轉換成未處理圖像發送給圖像信號處理單元,最終輸出相應的指定來指導駕駛。以CMS系統的光學仿真為例,對像面所接收的能量分布實施監測,評估遠距離的車牌識別能力,傳感器分辨力與成像傾斜度仿真,夜視效果以及霧氣影響等都是考量范圍。
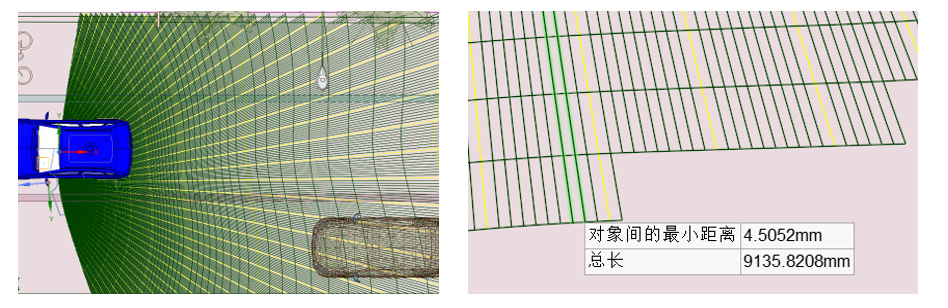
圖4 成像FOV分析 (左圖)
圖5 像素投影與尺寸分析(右圖)
因此如何得到車載鏡頭成像系統的能量分布以及圖像信號也是仿真中的關鍵環節。針對此問題Ansys 平臺開發了Zemax與Speos聯合方案。通過將Zemax透鏡組的系統參數(焦距、像差、景深、畸變等),按照視場角內每個采樣光線和探測器上每個像元的位置、能量之間的映射關系轉化成相應的DISTORTION文件,在Ansys Speos 的Camera Sensor中加載該文件就可以實現虛擬光學系統的導入。
運用Camera Sensor可以實現以下兩個核心功能。其一:如何可視化評估鏡頭的FOV、縱深可捕捉距離,以及針對目標場景的分辨力的解析;其二:成像系統能量、視覺、環境因素的仿真。其中圖8為不同時間(上海10點,12點,16點,18點))太陽入射方位對成像仿真影響,圖9為不同能見度(可見度15m,30m,50m)對成像效果影響。
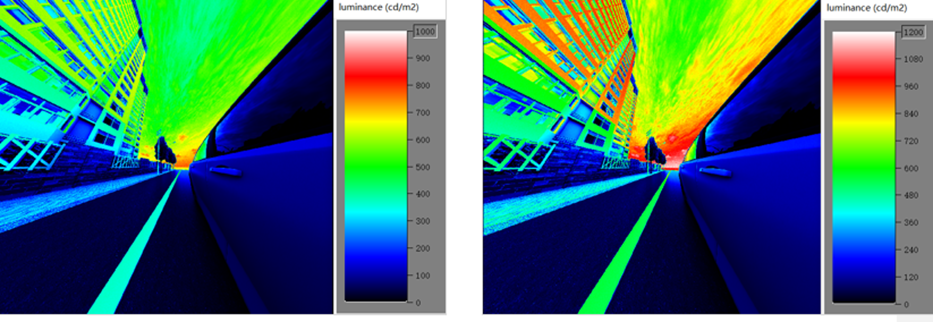
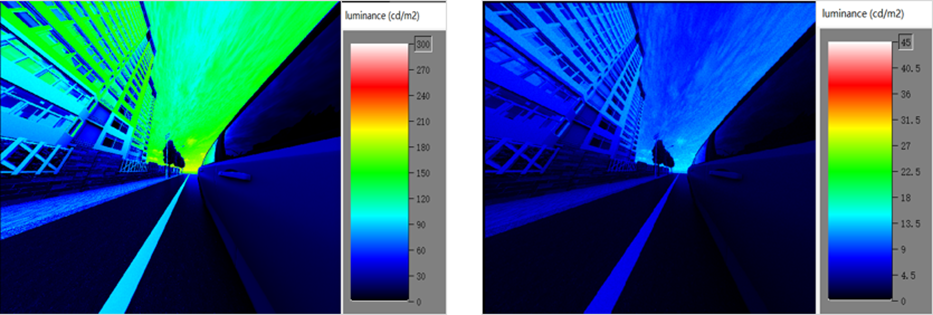
圖6 環境光能量分析
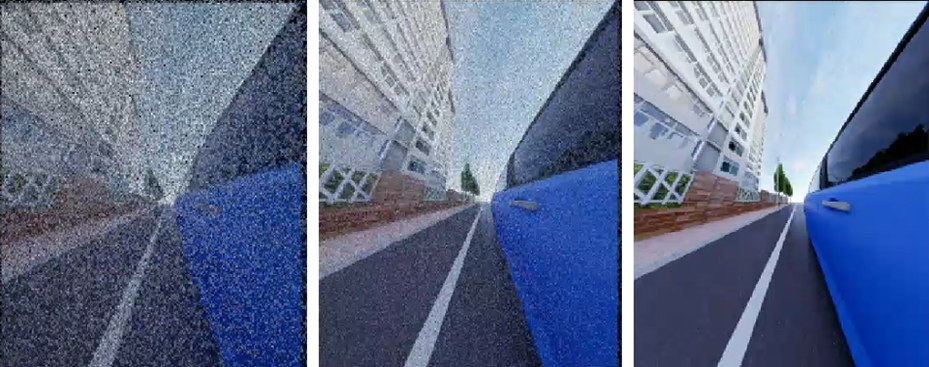
圖7 能見度仿真
核心問題四:成像系統的動態仿真
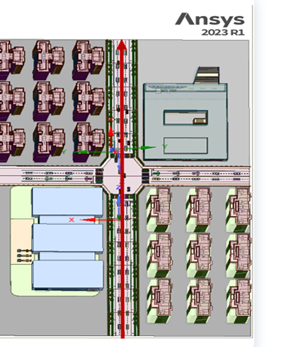
在分析自動駕駛時,多場景的動態仿真也是一個關鍵點。通過動態仿真可以結合場景等諸多環境因素實時捕獲多視角的圖像信息,從而可以更加全面驗證成像性能以及后期圖像算法的精確性。在進學校自動駕駛系統的動態仿真之前需求構建場景。主要包括道路、基礎交通設施(交通標線、交通標志、交通信號燈)、天氣、光照、其他建筑物基礎設施等。
在目前的軟件開發版本中Ansys 對目前主流的CAD軟件,比如CATIA、UG、犀牛、草圖大師等格式的數據是完全支持的,也就是不需要通過轉成中間格式數據就能導入,這種格式上的兼容性極大方便了后期種導入其他軟件所對應的3D場景。其次如何能生成動態的仿真也是自動駕駛種需要考量的,針對這種需求,可以運用Ansys 二次開發種腳本功能,通過采集不同路徑不同時刻下所對應的軌跡數據(包括初始的坐標原點,X/Y坐標值,以及對應的X/Y方向),生成特定的軌跡文件,加載到CAMERASensor即可。
 ?
?
圖8 直線軌跡動態仿真
核心問題五:攝像頭的多物理仿真
成像質量的好壞不僅僅取決光學像差的控制,更與系統所收到的力或者溫度影響,導致鏡片曲率發生改變而最終影響成像效果。目前針對多物理場的分析Ansys 平臺有兩種方案,一種是Ansys Mechanical聯合Speos來實現應力變形導致光學成像質量改變的分析,另一種是Mechanical 、Zemax聯合Speos的方案。前者主要依賴Workbench來實現同一數據的不同仿真結果在不同平臺無損傳遞來實現,后者則是通過txt文件記錄鏡片受力變形后數據重新擬合來參與光學仿真分析的思路。
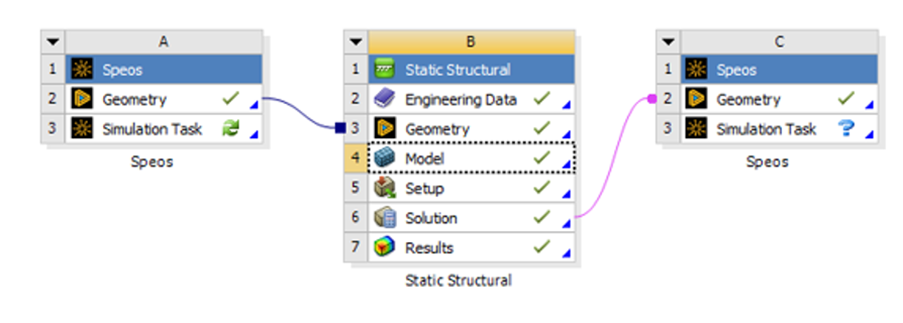
圖9 Mechanical與Speos聯合仿真工作流
圖10Zemax Star擬合鏡面
隨著國內外自動駕駛的提高,未來對車載鏡頭的聯合仿真的需求會逐漸加大,超高清分辨率、超低照度、日夜共焦、超廣角、大光圈、低畸變、小型化、高可靠性、紅外夜視、防水防霧、降噪、分析力熱變形等等逐步成為技術開發的熱點。運用Zemax+Speos (Lumerical,Cmos微觀效應,本文未涉及)以及Ansys的光機熱產品(Fluent,Mechanical),不論是從設計源頭像質、視覺,還是大型場景、環境因素,力熱變形等都能提供絕佳方案,高效助力解決設計到自動駕駛中遇到的光學疑難問題。
審核編輯:劉清
-
傳感器
+關注
關注
2562文章
52558瀏覽量
763654 -
控制器
+關注
關注
114文章
16962瀏覽量
182891 -
光學
+關注
關注
4文章
784瀏覽量
36979 -
人工智能
+關注
關注
1804文章
48700瀏覽量
246442 -
adas
+關注
關注
310文章
2239瀏覽量
209869
原文標題:案例 | 車載鏡頭光學仿真核心問題解析
文章出處:【微信號:ilinki,微信公眾號:智匯工業】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
PanDao:光學加工評估
精彩回顧 | 《電磁兼容仿真技術與電源EMC問題解析》直播圓滿結束!

請問DLP4500拆除光學鏡頭和光源后的如何工作?
車載總線監控分析及仿真工具 - VBA

弘景光電:以創新驅動發展,引領光學鏡頭及攝像模組行業新征程
一體化機芯技術解析:鏡頭、傳感器與電路板的完美融合
光學測量鏡頭怎么選?

舜宇光學科技7月手機鏡頭出貨量1.15億件
遠心鏡頭的幾個參數解析

工業鏡頭光學原理、優勢及應用

遠心鏡頭光學原理、優勢及應用





 工商網監
工商網監

評論