

本篇文章主要介紹主流自動駕駛實現方案中舉足輕重的一個部分——高精地圖。之所以稱其為主流方案,是因為總有一個奇葩,那就是特斯拉,偏偏不走尋常路。而除此之外,包括Waymo、蔚來、百度等上下游企業均選擇了高精地圖作為自動駕駛的支撐點。從Apollo的課程安排上也可以看出百度對自家高精地圖的重視和自信,畢竟比地圖資源可沒有幾家有他那樣的資質。
那么今天我們就來聊一聊高精地圖。
一、高精地圖VS傳統地圖
首先需要解決的問題是——什么是高精地圖?這要先從我們平時開車、出行所使用的導航地圖說起。當我們想去某地時,只要將目的地的名稱輸入app,軟件便會為我們規劃出一條或幾條合理的路線,不過這樣的路線通常只會顯示一些較少的信息。得益于人類發達的智能水平,你可以靠肉眼觀察便能讀懂各種交通信號、知道何時要變道、不能走錯車道、何時需要限速。
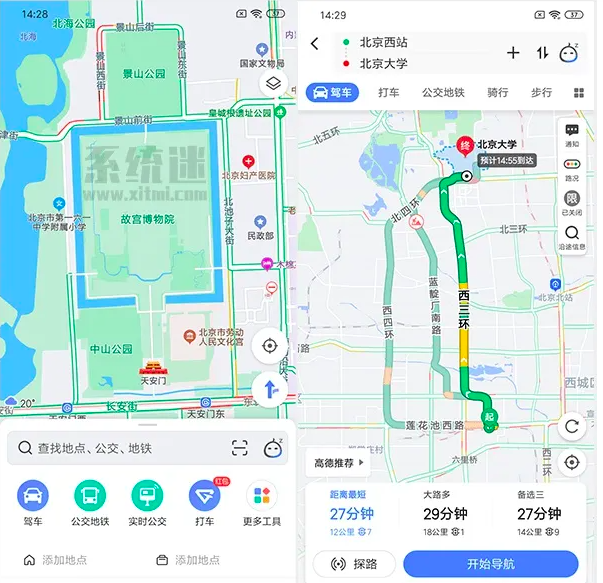
示例照片顯示某導航app能提供三種行車路線,以及擁堵、施工等信息。傳統地圖主要是給人看的。
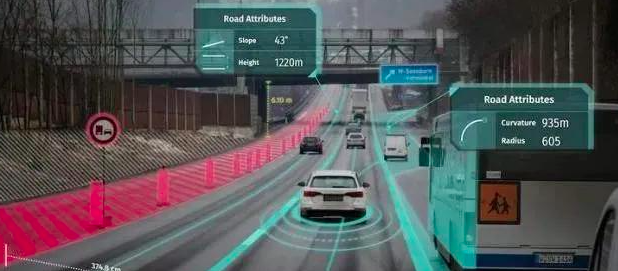
但是輪到車自己開了,這樣的地圖就顯得不夠用了,因為車輛的智能水平還遠遠達不到人類的水平,他們并不能知道路牌的信息含義、交通燈在哪,不同的車道代表了什么。因此,為了配合車輛做好感知、決策等一系列工作,人們開發出了高精地圖,這個地圖主要是為了給車看的。
因此,現在可以給出高精地圖的定義了:高精地圖(High Definition Maps, 縮寫為HD Maps)是一種包含大量駕駛輔助信息的高精確度機器用地圖。
那什么叫做“駕駛輔助信息”呢?實際上,你在路上開車碰到的所有車道標志、路牌標志、交通燈、路口布局、路標位置等等所有幫助你進行駕駛過程的都叫駕駛輔助信息。比如,你看到地面上的車道標志了,就知道左轉該走哪條車道、直行走哪條車道,中間的黃線不能逾越。根據上方的紅綠燈信息,你就知道了何時可以左轉,何時能夠直行,甚至這幅圖中還出現了左轉專用道,你還需要知道何時前出,駛入等候區。
再比如,下面這種豎在路邊的路牌也提供了駕駛信息,它告訴你機動車走哪條道,行人、自行車走哪條道,甚至這背后還暗含這樣的語義信息,駕駛時注意路邊的行人和自行車。

每一次駕駛行為中其實充滿了這些各式各樣的“輔助信息”,只是人類以其智慧能夠輕松應對,但是車輛就不行,它沒法像人一樣這么好的理解這些信息,因此就需要一幅為他量身打造的地圖,把這些信息全部標出來告訴他,他才能看得懂。
高精地圖最重要的特征之一便是“高精”,這一點從名字上就能看出來。那它的精度到底有多高呢?一般普通導航地圖所采用的GPS定位精確度為米級,信號較好的開闊地帶一般定位較為精準,但是一旦信號減弱或是有房屋遮擋,把你定位到河里也是有可能的。但是這在自動駕駛場景下便是不可接受的,因為這會給車輛帶來錯誤的感知定位,以至于產生災難性的后果,因此,將精度提高到“厘米級”勢在必行。

精確度為米級,會導致自主泊車上路牙子
二、高精地圖對于整個自動駕駛任務的重要意義
相對于人類的“高智商”,車輛也并非一無是處。他們擁有強大的“記憶能力”,可以記住每一個車道標記、每一處路標,從而確保定位精準。一幅高精地圖放在人類面前可能是眼花繚亂,過多的信息甚至會干擾人集中注意力駕駛;但是擺在機器面前那可是“多多益善”。自動駕駛車輛還能依靠高精地圖進行提前的規劃。因為事先已經采集到了行駛道路的所有數據,因此便可在實驗室的仿真軟件中事先對路徑進行預測規劃。
高精地圖對于感知、定位和規劃等核心模塊而言起到了基礎性的作用,它支撐著上層的算法架構。
1.高精地圖對感知功能的幫助在于它“提升”了硬件傳感器的感知范圍。和人類的眼睛一樣,無人駕駛車輛的傳感器也是受到距離限制的,尤其是在惡劣自然環境下,感知范圍大大受限。而高精地圖由于事先即存好了相應地點的地理位置信息,便可幫助傳感器進行超前感知。另外,高精地圖還能幫助傳感器縮小檢測范圍。高精地圖能夠告訴傳感器在哪些特定區域搜尋想要的信息,如交通信號燈、停車路牌等,這樣縮小了ROI(感興趣區域)的大小,便可節省感知耗費的時間。
2.高精地圖能夠為車輛提供精準定位。車輛的自主定位是從收集路標點開始的,通過感知得到的多模態數據在這一步里經過預處理、坐標轉換和數據融合,將路標點與高精地圖中所存的已有信息進行匹配,從而判斷出車輛的準確位置。
3.高精地圖可幫助預測規劃模塊找到合適的行車路線。例如,它能夠根據自身掌握的道路信息提前為車輛指明哪條路不堵,那條路行駛紅燈少等。它還能指引汽車找尋到車道中線,從而盡可能沿車道線安全行駛;在有限速等標志牌的路段,高精地圖能夠提前幫助決策進行車輛減速,從而降低突然減速帶來的不適駕乘體驗。
三、如何構建高精地圖
想要構建高精地圖自然少不了地圖采集設備,這里涉及到地圖測繪方面的專業知識,就一筆帶過。這樣的采集車攜帶的全是專業設備,并且具有地圖采集資質的地圖商并不多,這里面涉及很多國家機密,因此是不會對外國公司開放的。前不久被調查的滴滴就是因為掌握了出行地圖數據,涉及重大國家安全數據泄露而被多部委調查了。
百度為Apollo采集了一套覆蓋中國大部分高級道路的高精地圖,同時這些地圖還需不斷維護升級,比如這里的路在維修、那出了場車禍等等都可能引起高精地圖的“高精”不在。因此在數據采集階段,地圖公司需要養一個龐大的采集車隊,以確保對地圖的修正和更新。
在獲得采集到的大量數據后,需要對數據進行處理,包括整理、分類、清洗等,以獲得一張沒有任何語義信息或注釋的初始地圖模板。隨后,需要使用機器學習的方法對這上面的物體進行識別標注,這是一項繁復浩大的工程,所幸這些都可通過自動標注完成,大大減輕了人工標注的工作量。之后還需進行手動驗證,這確保了自動地圖創建過程中一切正常進行,并能夠及時發現問題。這些工作都做完之后,一幅高精地圖便可上線發布了。
當然,這樣龐大的工作如果只靠Apollo一家來做自然也是不現實的,百度采取了眾包的模式,讓每一個用戶在每日駕駛過程中幫助更新高精地圖,從而確保地圖的實時準確性。
下面是找到的另一家地圖廠商在構建高精地圖時的方法,可供大家了解參考。
想要更深入的學習高精地圖是如何制作的,推薦大家去報名深藍學院的《基于圖像的三維重建》這門課程。眾所周知,基于圖像的三維重建是自動駕駛中制作矢量高精地圖的關鍵技術,而深藍學院邀請名師授課,梳理了三維重建的完整技術流程,又提供針對性的編程訓練。在這一領域苦苦鉆研的小伙伴建議去聽一聽~
四、高精地圖的問題
最后來談一談高精地圖的問題。其實高精地圖本身最大的優點同時也是其最大的缺點。如何理解這句話?高精地圖由于追求“高精”而使日常維護變得極為繁瑣,在降低實現L4自動駕駛難度的同時也讓相關自動駕駛算法更加依賴于高精地圖,換句話說,如果車輛行駛至某處沒有高精地圖或者高精地圖沒來得及更新的地點,則可能導致車不會走了而發生交通事故。這也是為何激進的特斯拉選擇直接放棄高精地圖的原因。
審核編輯 :李倩
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763537 -
自動駕駛
+關注
關注
788文章
14192瀏覽量
169465 -
Apollo
+關注
關注
5文章
346瀏覽量
18697
原文標題:從零學習自動駕駛—百度Apollo高精地圖
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
百度王勁:百度掌握自動駕駛十項核心技術
3天造出自動駕駛汽車的百度Apollo,背后竟有50多個后臺
百度Apollo 5.5自動駕駛平臺發布,新增了什么功能呢
百度Apollo發布消息 自動駕駛開放平臺將迎來新的合作伙伴
百度正式宣布量產自動駕駛計算平臺Apollo Computing Unit正式下線
百度最新版本Apollo6.0發布,百度自動駕駛技術的更迭
百度通過Apollo平臺和Weltmeister EV展示了全自動駕駛
百度自動駕駛車輛規模擴充 新增Apollo Moon 極狐版
百度Apollo自動駕駛科技教育華西區域示范基地落地重慶永川






 工商網監
工商網監

評論