 全橋LLC電路的三種控制方式
全橋LLC電路的三種控制方式
有限雙極性控制方式
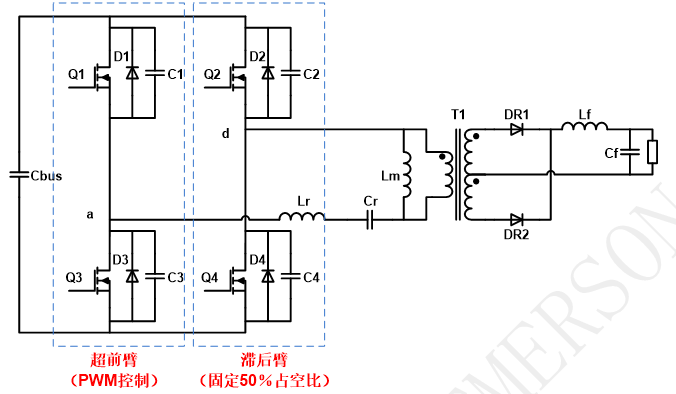
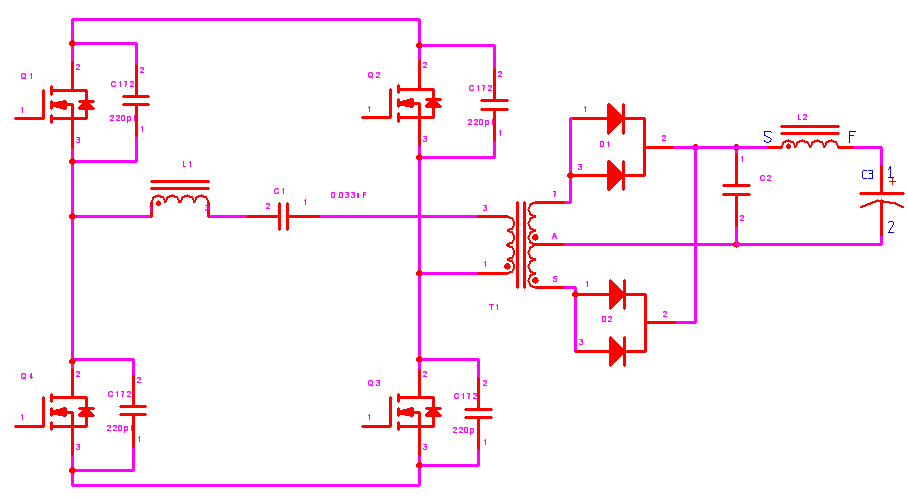
圖1有限雙極性控制的全橋電路
有限雙極性控制的全橋電路如圖1所示,其中,超前臂MOS管Q1、Q3的驅動信號脈寬可調(PWM控制);滯后臂MOS管Q2、Q4的驅動信號脈寬不可調,為固定50%占空比。C1~C4分別為Q1~Q4的外并電容(含Q1~Q4的寄生電容),假設容值都為C。開關管Q1、Q4和Q2、Q3保持相同的開通時刻,每個橋臂的兩個MOS管成180°互補導通,為了避免同一橋臂上下管同時導通,上下管需設置一個固定的死區時間。通過調節Q1、Q3驅動信號的脈寬可以調節輸出電壓。
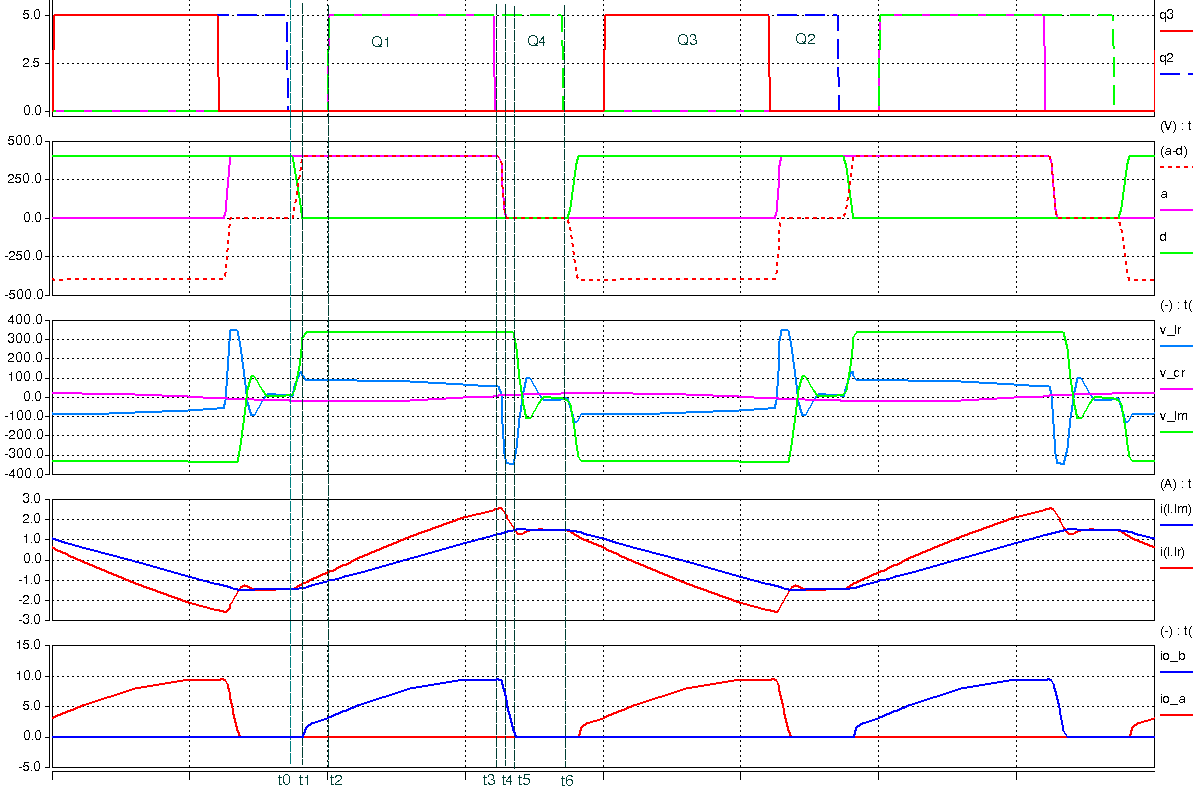
圖2 有限雙極性控制時主要波形
在半個工作周期內,有限雙極性控制的全橋變換器有6個工作過程,電路的主要波形如圖2所示。
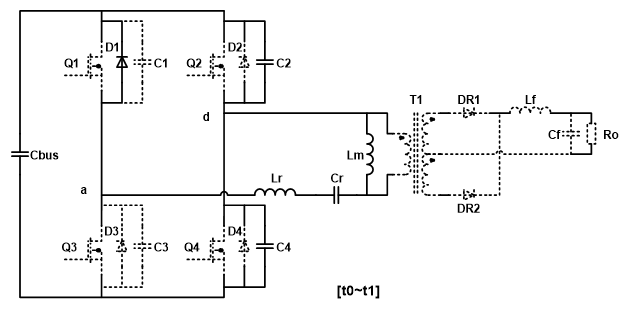
① 開關模態1[t0~t1]:t0時刻,Q2管關斷(由于C2的存在,Q2管為零電壓關斷),諧振電感電流為反向電流,流過Q1的體二極管D1,為Q1管的ZVS導通創造了條件。此時C4開始放電,C2開始充電,d點電位開始下降,Uad電位開始上升。假設此時的諧振電流恒定,則d點電位完全到零的時間為:
t01=2CUin/ip1 (1)
由于此時諧振電感與勵磁電感串聯諧振,諧振電流和勵磁電流開始正向增加,諧振電感電壓和變壓器原邊電壓都從零開始正向增加,此時諧振電容開始負向增加。
滯后橋臂要實現ZVS的條件:滯后橋臂(Q2、Q4)的死區間隔時間大于Q2、Q4管結電容的充放電時間。
輕載時,由于ip1很小,造成了t01很大,當充放電時間t01大于死區td時,Q4管ZVS導通失敗。
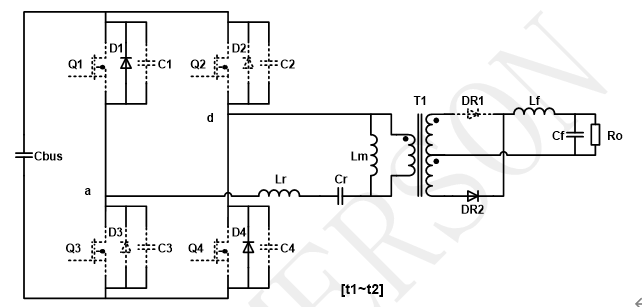
② 開關模態2[t1~t2]:t1時刻,當C4完全放電后(即d點的電位下降到零時),Uad電壓被箝位為母線電壓。由于諧振電流仍為負向,Q4管的體二極管D4開始流過電流。此時諧振電流開始大于勵磁電流,DR2導通,原邊變壓器電壓被箝位在nVo,原邊開始向副邊傳能。
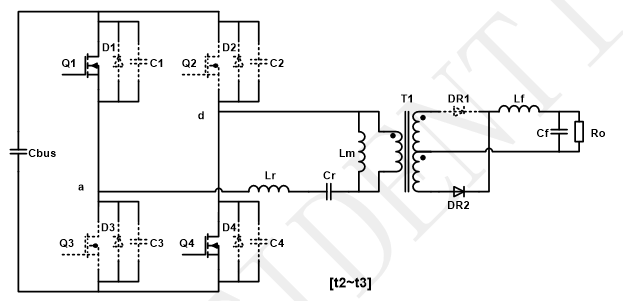
③ 開關模態3[t2~t3]:t2時刻,Q1,Q4管導通。考慮到之前D1和D4管都在負向流過電流,此時開關管Q1和Q4為ZVS導通(輕載時Q4可能為非ZVS導通)。輸入電壓通過LrCr諧振環節向負載傳遞能量,此時由于DR2導通,勵磁電流im繼續線性上升,并且過零反向繼續上升;
Vm=nVo=Lmdi/dt
諧振電流ir流經Q1、Lr、Cr 、變壓器原邊和Q4,以正弦形式諧振。流經DR2的電流折算到原邊為諧振電流和勵磁電流之差。由于開關頻率(250KHz)fs>fr(117KHz),諧振電流會一直增加。
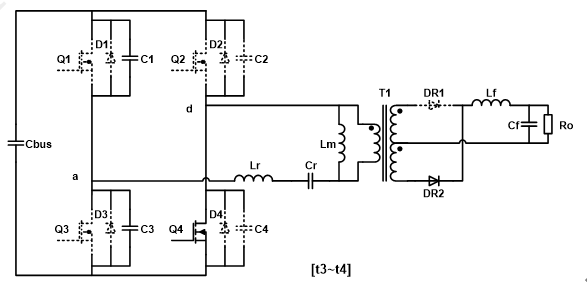
④ 開關模態4[t3~t4]:t3時刻,Q1管關斷,Q4管保持導通。由于C1的存在,Q1的關斷為零電壓關斷。C1開始充電,C3開始放電,此時a點的電位開始下降。假設此時的諧振電流恒定,則a點電位完全到零的時間為:
t34=2CUin/ip2 (2)
同樣輕載時,由于ip2>ip1,使得相同電容條件下,t34 >t01。由于C3只需要在Q3開關管導通前放完電,放電的時間較長,可以很容易實現Q3管的ZVS導通。由于此時變壓器原邊電壓被箝位,諧振電感上的電壓VLr會隨著C3的電壓減小而減小,使得諧振電感上電壓為負,諧振電流開始減小。
超前臂要實現ZVS的條件為:超前橋臂(Q1、Q3)的導通與關斷信號之間的間隔大于Q1、Q3管結電容的充放電時間。
這里若采用移相控制方法,由于死區td是固定的,當負載電流小于某個值時,C1,C3的充放電時間將會大于超前臂的死區時間,使得Q3的ZVS導通失敗。而采用雙極性控制方式,當負載電流較小時,輸出的電壓隨之增大,閉環控制使得超前臂Q1、Q3的導通脈寬變小,相當于增大了Q1、Q3從關斷到導通之間的時間間隔,從而使電容C1、C3有足夠的時間來充放電。當負載電流增大時,雖然Q1、Q3的導通脈寬增大,Q1、Q3從關斷到導通之間的時間間隔減小了,但電容C1、C3充放電時間也大大加快了。
有限雙極性控制與相對移相控制方式相比,超前臂開關管可以在更大負載范圍內實現ZVS導通。
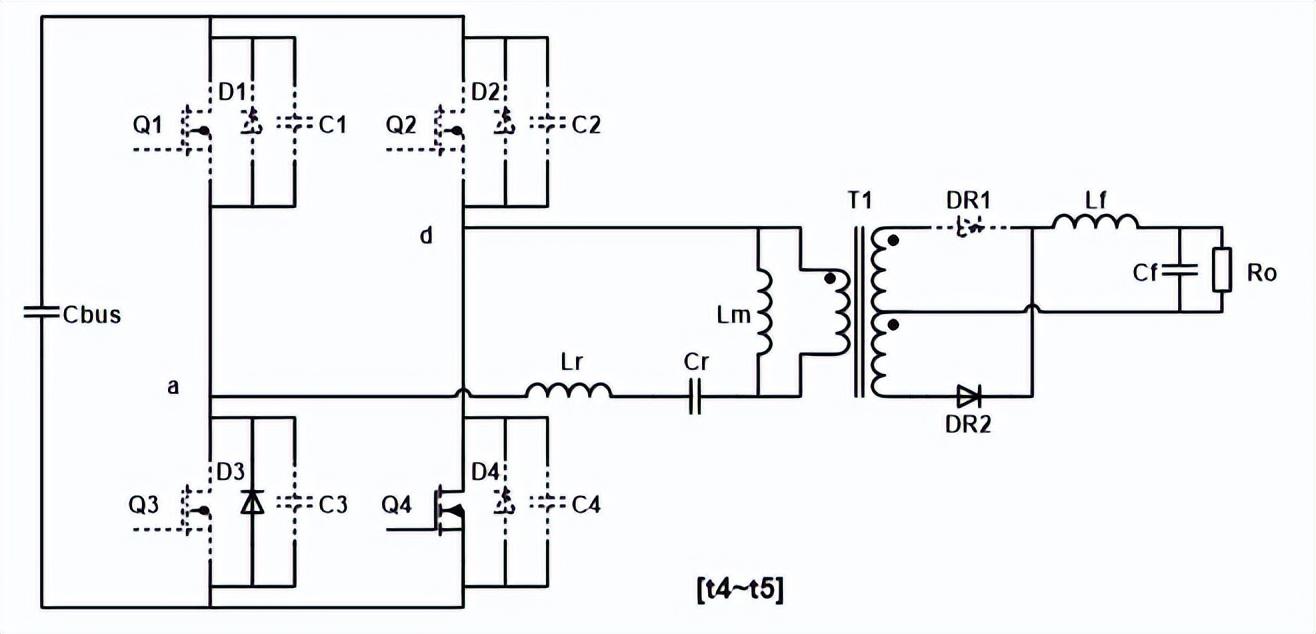
⑤ 開關模態5[t4~t5]:t4時刻,a點電位為零,開關管的體二極管D3開始續流。由于DR2一直導通,變壓器原邊電壓被箝位,諧振電流ir流經D3、Lr、Cr 、變壓器原邊和Q4,以正弦形式諧振。直到諧振電流與勵次電流相等。
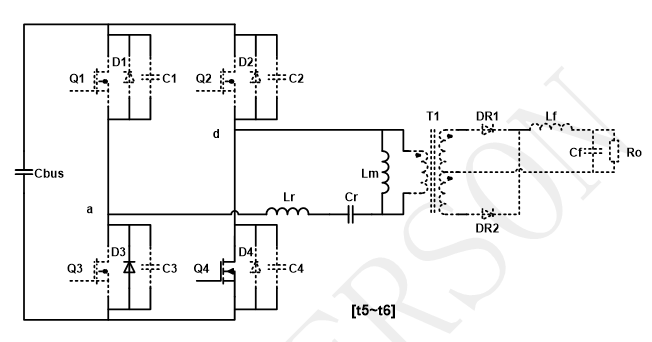
⑥ 開關模態6[t5~t6]:t5時刻,諧振電流與勵磁電流相等,整流二極管DR2零電流關斷,輸出側與原邊諧振回路完全脫離。勵磁電感上的電壓不再受輸出電壓控制,Lm與Lr串聯參與諧振。由于Lm>>Lr,諧振周期變長,可認為諧振電流基本保持不變。t6時刻,Q4管關斷,與t0時刻Q2關斷后工作原理相近似。
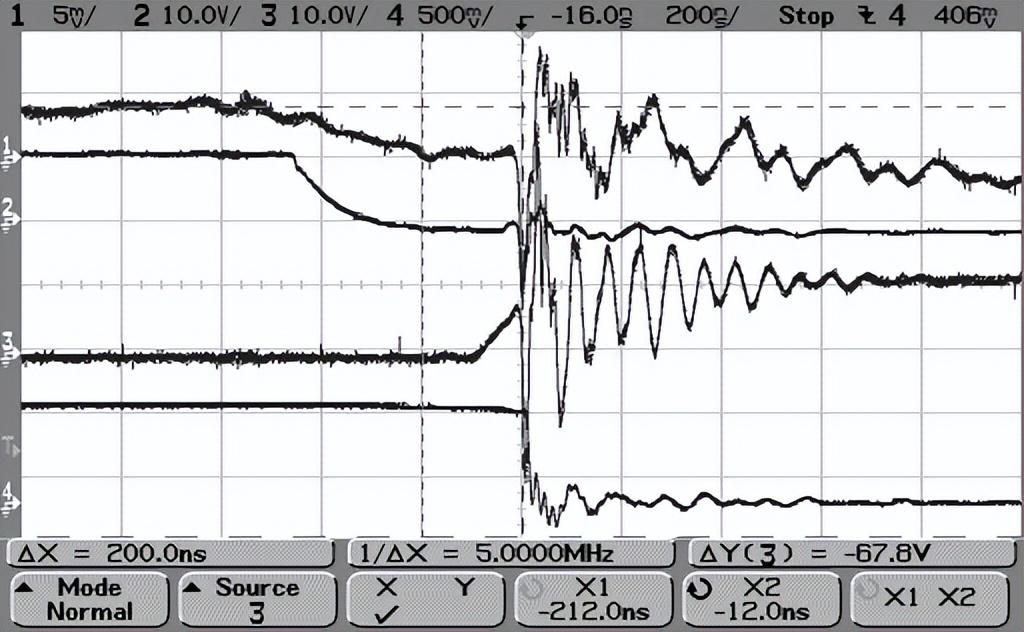
42V/10A
53.5V/10A
圖3 iLr、Vgs4、Vgs2和Vds2波形
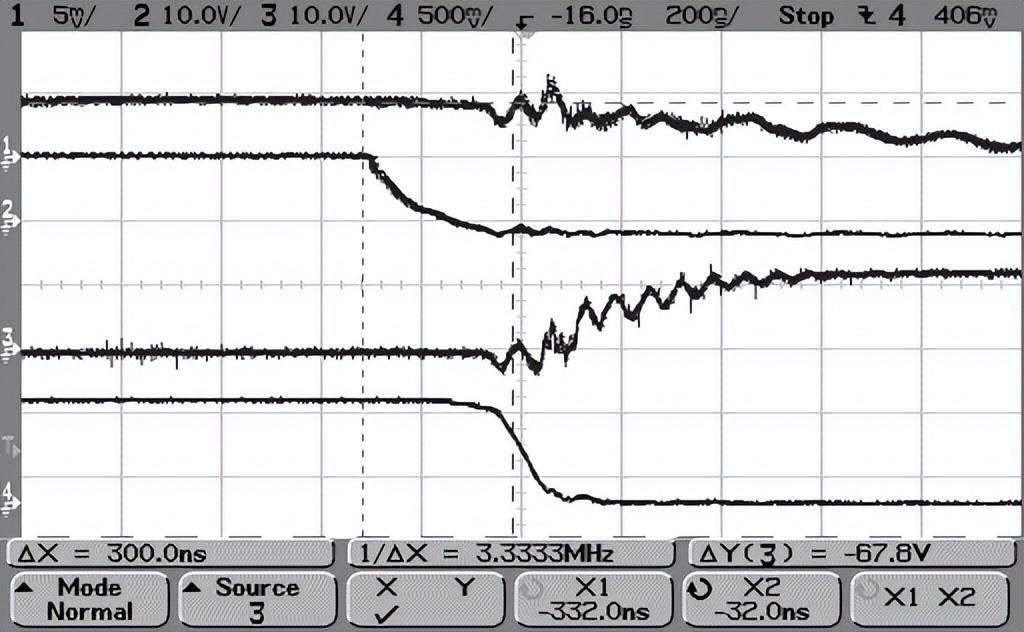
42V/10A
圖4 ids2、Vgs2、Vds2和Vgs4波形
PWM控制方式分析:
雙極性控制的全橋電路如圖3所示,其中,Q1~Q4為功率MOS管,D1~D4分別為Q1~Q4的體二極管,C1~C4分別為并聯在Q1~Q4管兩端外并電容(含Q1~Q4的寄生電容)。每個橋臂的兩個MOS管成180°互補導通,為了避免同一橋臂上下管同時導通,上下管需設置一個固定的死區時間。通過調節Q1、Q3和Q2、Q4驅動信號的脈寬可以調節輸出電壓。
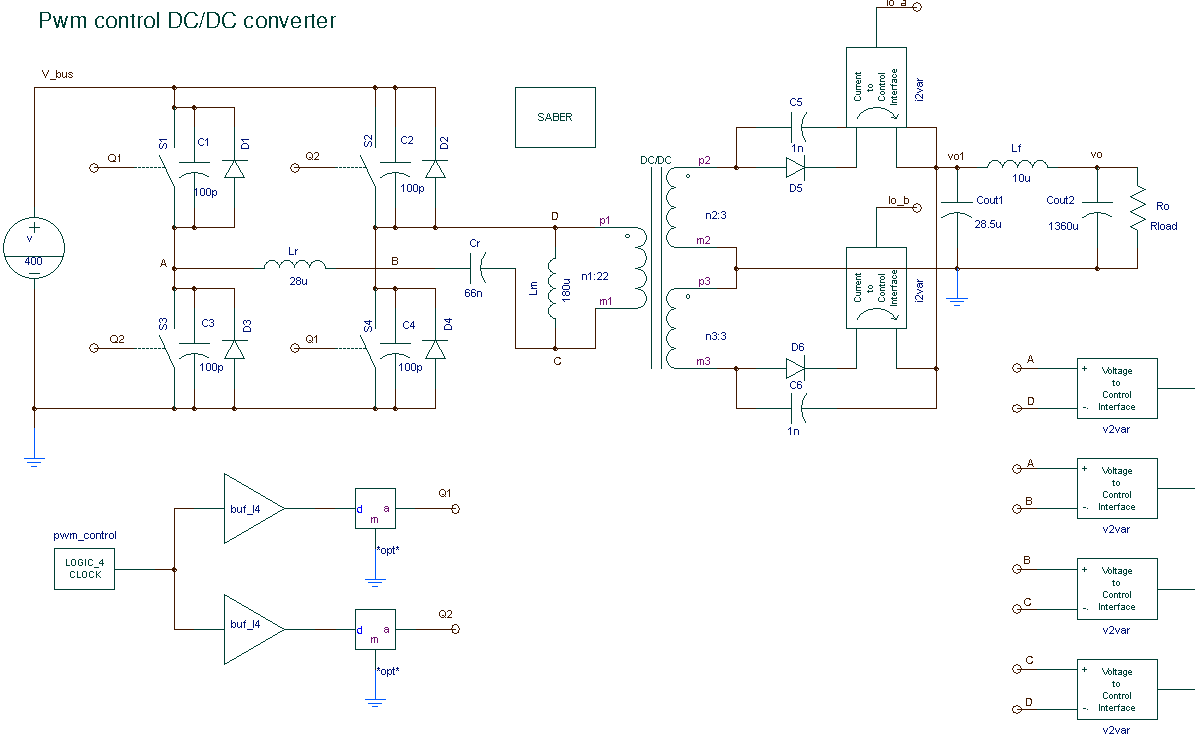
圖3 PWM控制的全橋電路
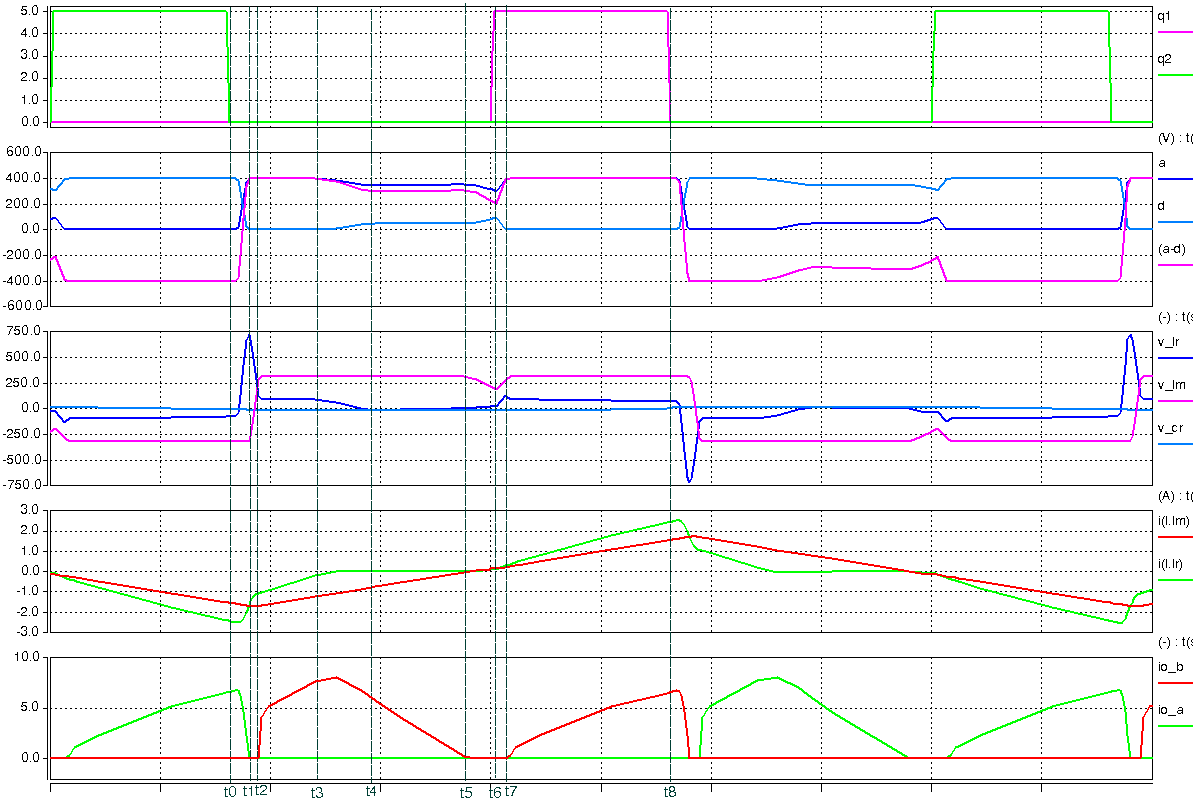
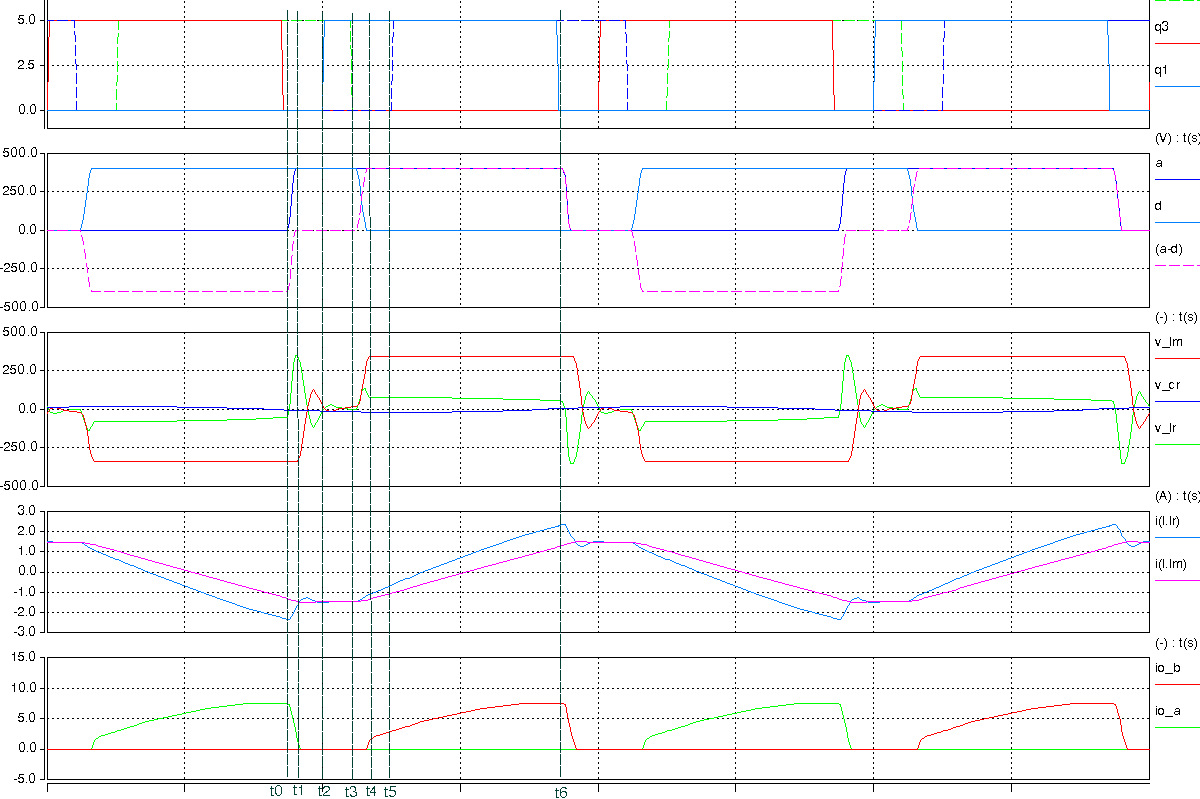
圖4 PWM控制時主要波形
在半個工作周期內,有限雙極性控制的全橋變換器有6個工作過程,電路的主要波形如圖2所示。
電路的工作過程如下:
① 開關模態1[t0~t1]:t0時刻,Q2管關斷(由于C2的存在,Q2管為零電壓關斷),諧振電感電流為反向電流。由于此時a點電位為零,d點電位為Vbus,反向的諧振電流不會流過體二極管D1和D4。此時DR1仍輸出電流,變壓器原邊被箝位在nVo,勵磁電流繼續減小。諧振電感Lr與電容C1~C4開始諧振,C1,C4開始放電,C2,C3開始充電,即a點電位開始上升,d點電位開始下降。由于變壓器原邊電流被箝位,使得諧振電感電壓急劇正向增加,諧振電流負向急劇減小(諧振電流正向增加)。
② 開關模態2[t1~t2]:t1時刻,當諧振電流與勵磁電流相等時,DR1零電流關斷,輸出側與原邊諧振回路完全脫離。此時a點電位上升到Vbus,d點電壓下降到零,體二極管D1和D4開始導通。D1、Lr,Cr,Lm和D4開始諧振。由于Uad電壓箝位在Vbus,變壓器原邊電壓開始從負壓開始正向增加,諧振電感電壓從正壓開始下降。在變壓器原邊電壓到零之前,勵磁電流仍在負向增加,直到原邊變壓器電壓為正后,勵次電流才開始正向增加。而諧振電感電流則開始向正向增加。
③ 開關模態3[t2~t3]:t2時刻,當諧振電感電壓下降到等于變壓器原邊電壓時,DR2開始流過電流。由于變壓器原邊電壓箝位在nVo,勵磁電流開始線性增加。諧振電感與諧振電容開始諧振,諧振電容電壓下降,諧振電感電壓增加,使得諧振電感電流上升斜率大于勵磁電流上升斜率,輸出電流在一直增加。
④ 開關模態4[t3~t4]:t3時刻,當諧振電流負向減小到接近于零時,諧振電流開始向C1、C4充電,C2、C3開始放電,a點電位開始下降,d點電位開始上升。到t4時刻,諧振電流完全為零后,C1~C4充放電結束。
⑤ 開關模態5[t4~t5]:t4時刻,當諧振電流完全為零后,C1~C4充放電結束時,副邊DR2流過的電流完全靠勵磁電流提供。
⑥ 開關模態6[t5~t6]:t5時刻,當勵磁電感電流等于諧振電流(都為零)時,DR2零電流關斷,輸出側與原邊諧振回路完全脫離。此時,C1~C4與Lm、Cr和Lr繼續諧振,使得a電電位繼續下降,d點電位繼續增加,直到t6時刻Q1、Q4管導通。
⑦ 開關模態7[t6~t7]:t6時刻,開關管Q1、Q4硬開關導通。當此后,C1充電到母線電壓,C4放電到零后,諧振電流和勵磁電流開始增加。
⑧ 開關模態8[t7~t8]:t7時刻,諧振電流開始大于勵磁電流,DR1開始導通,諧振電感和諧振電容開始諧振,變壓器原邊開始向副邊傳能,直到t8時刻Q1關斷。
從上面的分析可以看出:PWM控制時,輕載容易出現不可控的諧振傳能的區間(t2~t5),當從調頻態切換到調頻調寬態后,易出現諧振傳能的區間,使得電壓增益出現跳變。
同樣,PWM態下要實現Q1、Q4管的ZVS導通,需要在諧振電感電流正向到零之前將Q1、Q4導通,這樣占空比較小時,就無法實現Q1、Q4管的ZVS導通。
移相控制方式
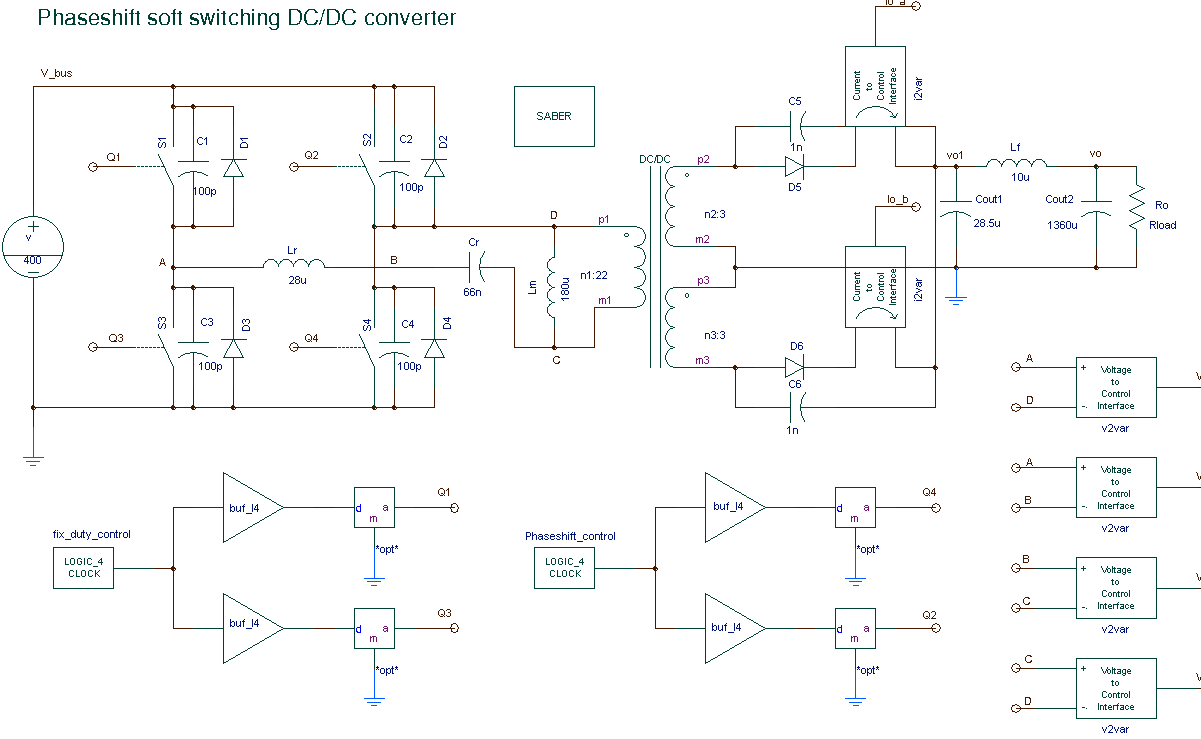
圖1移相控制的全橋電路
移相控制的主要波形
移相控制的全橋電路如圖1所示,其中,超前臂MOS管Q1、Q3的驅動信號脈寬可調(PWM控制);滯后臂MOS管Q2、Q4的驅動信號脈寬不可調,為固定50%占空比。C1~C4分別為Q1~Q4的外并電容(含Q1~Q4的寄生電容),假設容值都為C。每個橋臂的兩個MOS管成180°互補導通,為了避免同一橋臂上下管同時導通,上下管需設置一個固定的死區時間。通過調節Q1、Q3驅動信號的脈寬可以調節輸出電壓。
三種發波方式對比:
| 發波方式 | PWM控制 | 移相全橋 | 有限雙極性 |
| 優點 | ①控制簡單; | ① | ①超前臂容易實現ZVS導通。 |
| 缺點 | ①硬開關狀態,開關損耗大; | ①死區時間不好調;輕載時超前和滯后臂都難實現ZVS導通。 | ①輕載時滯后臂難實現ZVS導通。 |
-
PWM
+關注
關注
114文章
5209瀏覽量
215691 -
控制方式
+關注
關注
0文章
55瀏覽量
10768 -
全橋電路
+關注
關注
24文章
22瀏覽量
51236 -
LLC
+關注
關注
36文章
580瀏覽量
77253 -
LLC電路
+關注
關注
1文章
43瀏覽量
7583
發布評論請先 登錄
相關推薦
非隔離型開關電源的三種工作方式







 工商網監
工商網監
評論