 基于PWM技術的直流電機控制系統
基于PWM技術的直流電機控制系統
由于直流電機具有良好的起動、制動和調速性能,已廣泛應用于工業、航天領域等各個方面。隨著電力電子技術的發展,脈寬調制(PWM)調速技術已成為直流電機常用的調速方法,具有調速精度高、響應速度快、調速范圍寬和功耗低等特點。而以H橋電路作為驅動器的功率驅動電路,可方便地實現直流電機的四象限運行,包括正轉、正轉制動、反轉、反轉制動,已廣泛應用于現代直流電機伺服系統中。
**1.直流電機PWM調速控制原理**
眾所周知,直流電動機轉速公式為:
n=(U-IR)/Kφ
其中U為電樞端電壓,I為電樞電流,R為電樞電路總電阻,φ為每極磁通量,K為電動機結構參數。
直流電機轉速控制可分為勵磁控制法與電樞電壓控制法。勵磁控制法用得很少,大多數應用場合都使用電樞電壓控制法。隨著電力電子技術的進步,改變電樞電壓可通過多種途徑實現,其中脈沖寬度調制(PWM)便是常用的改變電樞電壓的一種調速方法。其方法是通過改變電機電樞電壓接通時間與通電周期的比值(即占空比)來調整直流電機的電樞電壓U,從而控制電機速度。
PWM的核心部件是電壓-脈寬變換器,其作用是根據控制指令信號對脈沖寬度進行調制,以便用寬度隨指令變化的脈沖信號去控制大功率晶體管的導通時間,實現對電樞繞組兩端電壓的控制。
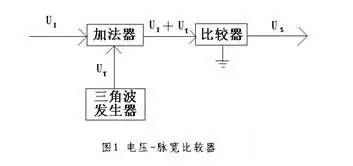
電壓-脈寬變換器結構如圖1所示,由三角波發生器、加法器和比較器組成。三角波發生器用于產生一定頻率的三角波UT,該三角波經加法器與輸入的指令信號UI相加,產生信號UI+UT,然后送入比較器。比較器是一個工作在開環狀態下的運算放大器,具有極高的開環增益及限幅開關特性。兩個輸入端的信號差的微弱變化,會使比較器輸出對應的開關信號。一般情況下,比較器負輸入端接地,信號UI+UT從正端輸入。當UI+UT>0時,比較器輸出滿幅度的正電平;當UI+UT<0時,比較器輸出滿幅度的負電平。
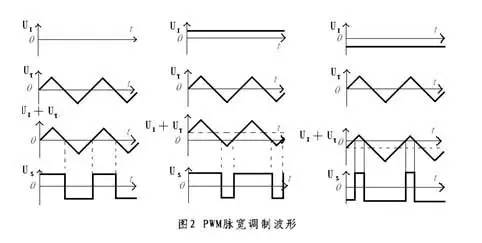
電壓-脈寬變換器對信號波形的調制過程如圖2所示。由于比較器的限幅特性,輸出信號US的幅度不變,但脈沖寬度隨UI的變化而變化,US的頻率由三角波的頻率所決定。
當指令信號UI=0時,輸出信號US為正負脈沖寬度相等的矩形脈沖。
當UI>0時,US的正脈寬大于負脈寬。
當UI<0時,US的正脈寬小于負脈寬。
當UI≥UTPP/2時(UTPP是三角波的峰值),US為一正直流信號;當UI≤UTPP/2時,US為一負直流信號。
**2.直流電機驅動控制總流程圖**
直流電機驅動控制電路分為控制信號電路、脈寬調制電路、驅動信號放大電路、H橋功率驅動電路等部分,控制總流程如圖3所示。
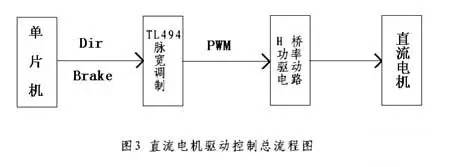
由圖3可以看出,首先由單片機發出電機邏輯控制信號,主要包括電機運轉方向信號Dir,電機調速信號PWM及電機制動信號Brake,然后由TL494進行脈寬調制,其輸出信號驅動H橋功率電路來驅動直流電機。其中H橋是由4個大功率增強型場效應管構成的,其作用是改變電機的轉向,并對驅動信號進行放大。
**3.TL494脈沖寬度調制電路**
3.1TL494各管腳功能。
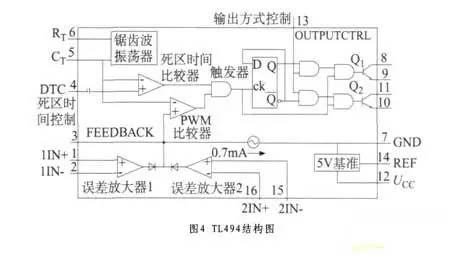
在實現電機PWM控制的電路中,本系統選用TL494芯片,其內部電路由基準電壓產生電路、振蕩電路、間歇期調整電路、兩個誤差放大器、脈寬調制比較器以及輸出電路等組成。,共16個管腳,其功能結構如圖4所示。
TL494芯片廣泛應用于單端正激雙管式、半橋式、全橋式開關電源。其片內資源有:
集成了全部的脈寬調制電路。
片內置線性鋸齒波振蕩器,外置振蕩元件僅兩個(一個電阻和一個電容)。
內置誤差放大器。
內止5V參考基準電壓源。
可調整死區時間。
內置功率晶體管可提供500mA的驅動能力。
推或拉兩種輸出方式。
3.2工作原理簡述
TL494是一個固定頻率的脈沖寬度調制電路,內置了線性鋸齒波振蕩器,振蕩頻率可通過外部的一個電阻和一個電容進行調節,其振蕩頻率如下:

輸出脈沖的寬度是通過電容CT上的正極性鋸齒波電壓與另外兩個控制信號進行比較來實現。功率輸出管Q1和Q2受控于或非門。當雙穩觸發器的時鐘信號為低電平時才會被選通,即只有在鋸齒波電壓大于控制信號期間才會被選通。當控制信號增大,輸出脈沖的寬度將減小。
控制信號由集成電路外部輸入,一路送至死區時間比較器,一路送往誤差放大器的輸入端。死區時間比較器具有120mV的輸入補償電壓,它限制了最小輸出死區時間,約等于鋸齒波周期的4%,當輸出端接地,最大輸出占空比為96%,而輸出端接參考電平時,占空比為48%。當把死區時間控制輸入端接上固定的電壓(范圍在0—3.3V之間)即能在輸出脈沖上產生附加的死區時間。
該芯片具有抗干擾能力強、結構簡單、可靠性高以及價格便宜等特點。
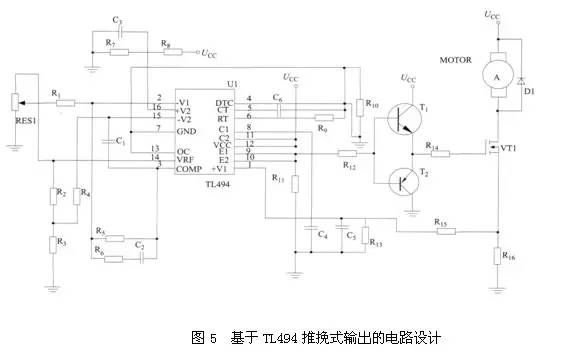
3.3基于TL494推挽式輸出的電路設計
該控制系統的具體實現電路如圖5所示。系統功率驅動選用MOSFET,其輸入阻抗很高,可直接由晶體三極管驅動。TL494的13腳用來控制輸出模式。在該系統中,選擇將該端輸入為低電平,這時TL494內觸發器Q1和Q2不起作用,兩路輸出相同,其頻率和振蕩器頻率相同、最大占空比為98%。
**4.H橋功率驅動原理與電路設計**
驅動信號在經TL494的脈寬調制后,在直流電機控制中常用H橋電路作為驅動器的功率驅動電路。這種驅動電路可方便地實現直流電機的四象限運行,分別對應正轉、正轉制動、反轉、反轉制動。由于功率MOSFET是壓控元件,具有輸入阻抗大、開關速度快、無二次擊穿現象等特點,滿足高速開關動作需求,因此常用功率MOSFET構成H橋電路的橋臂。H橋電路中的4個功率MOSFET分別采用N溝道型和P溝道型,而P溝道功率MOSFET一般不用于下橋臂驅動電機,上下橋臂分別用2個P溝道功率MOSFET和2個N溝道功率MOSFET。其電路圖如圖6所示。
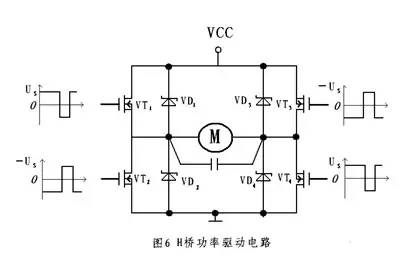
圖圖中VCC為電機電源電壓,,輸出端并聯一只小電容,用于降低感性元件電機產生的尖峰電壓。4個二極管為續流二極管,可為線圈繞組提供續流回路。當電機正常運行時,驅動電流通過主開關管流過電機。當電機處于制動狀態時,電機工作在發電狀態,轉子電流必須通過續流二極管流通,否則電機就會發熱,嚴重時甚至燒毀。US來自TL494的輸出,-US可通過對US反相獲得。當US>0時,VT1和VT4導通,US<0時,VT2和VT3導通。
按照控制指令的不同情況,該功放電路及其所驅動的直流伺服電機可以有以下四種工作狀態:
1)當UI=0時,US的正負脈寬相等,直流分量為零,VT1和VT4的導通時間和VT2和VT3導通時間相等,通過電樞繞組中的平均電流為零,電動機不轉。
2)當UI>0時,US的正脈寬大于負脈寬,直流分量大于零,VT1和VT4的導通時間大于VT2和VT3導通時間,通過電樞繞組中的平均電流大于零,電動機正轉,且隨著UI增加,轉速增加。
3)當UI<0時,US的直流分量小于零,VT1和VT4的導通時間小于VT2和VT3導通時間,通過電樞繞組中的平均電流小于零,電動機反轉,且反轉轉速隨著UI的減小而增加。
4)當UI≤UTPP/2或UI≤-UTPP/2時,US為正或負的直流信號,VT1和VT4于或VT2和VT3始終導通,電機在最高轉速下正轉或反轉。
結束語
本文所述的直流電機調速系統以TL494為核心,構成H橋雙極式PWM直流電機調速系統,較好地實現了對直流電機的速度控制,并具有精度高、響應速度快、穩定性好等優點。從實際運用來看,TL494用于直流電機的PWM調速,不僅具有良好的性能,而且經濟可靠,因而具有很大的實用價值。
-
直流電機
+關注
關注
36文章
1710瀏覽量
70157 -
PWM
+關注
關注
114文章
5181瀏覽量
213806 -
航天領域
+關注
關注
0文章
3瀏覽量
5837
發布評論請先 登錄
相關推薦
設計方案:基于單片機AT89S52的直流電機PWM調速控制系統
TL494推挽式輸出的電路設計(基于TL494的H橋直流電機控制系統)
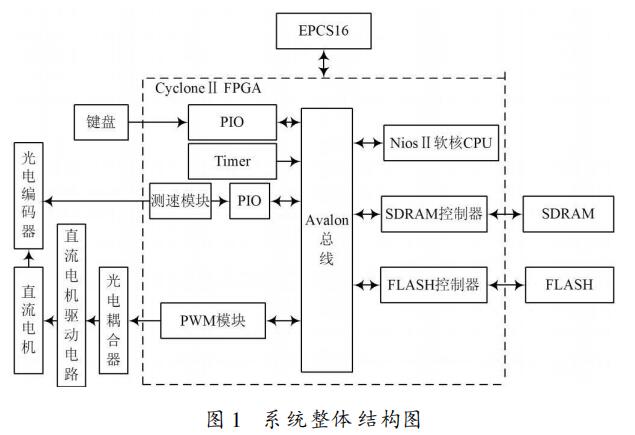
如何使用Nios Ⅱ設計直流電機PID調速控制系統的資料說明
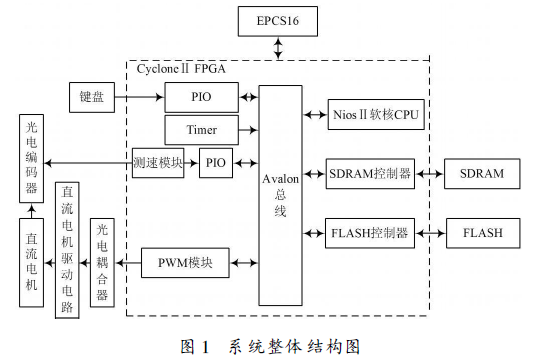
基于Nios的直流電機PID調速控制系統
基于SENT協議的有刷直流電機控制系統設計






 工商網監
工商網監
評論