


介紹之前,首先介紹一下 STM32F103 TIM 的一些相關(guān)特性:
- 無法使用外部引腳中斷觸發(fā) DMA (有些型號(hào)可以)
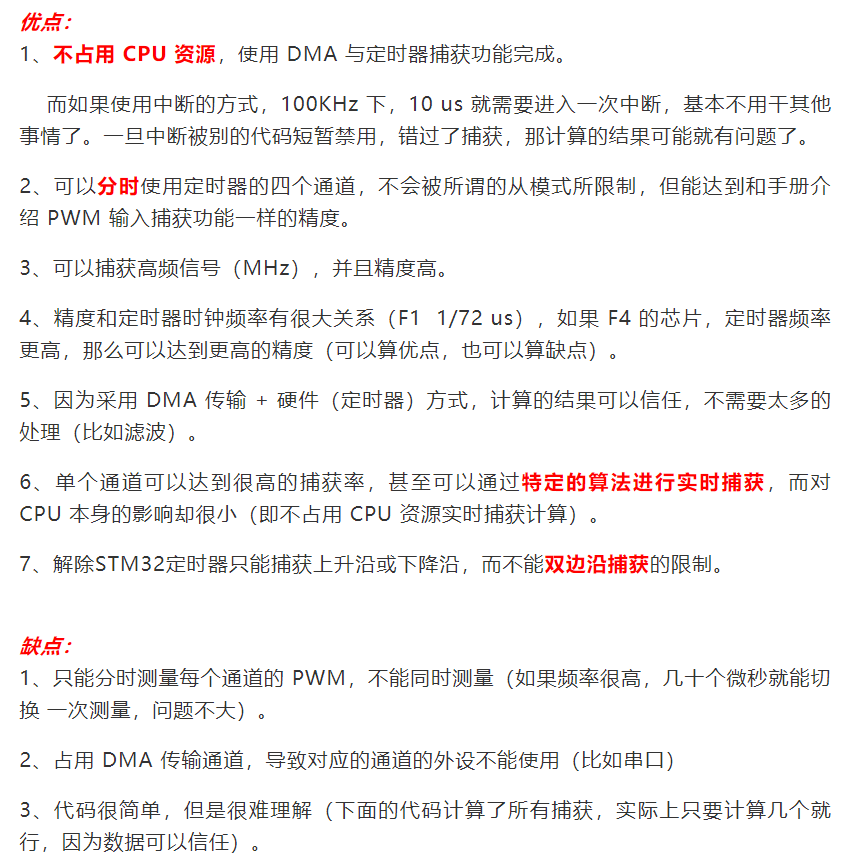
- 無法使用 TIM 同時(shí)捕獲 上升沿和下降沿 。你在庫里面看到的宏其實(shí)在使用時(shí)受到了限制,高級(jí)定時(shí)器1、8,通用定時(shí)器2、3、4、5都不行,而一般103 就只帶這些定時(shí)器。

 3、高頻信號(hào)輸入時(shí),中斷進(jìn)入很頻繁,如果是 100 K 頻率,你需要 5 us 進(jìn)入一次(高低電平各一次,還是在占空比為 50 % 情況下,其它占空比條件更為苛刻),如果采用中斷處理方式,你必須在中斷中完成很多操作(清標(biāo)志、計(jì)算、翻轉(zhuǎn)極性等),同時(shí)你需要保證這兩次中斷不能被全局中斷禁止,或者被高優(yōu)先級(jí)中斷打斷,否則,你得到的可能就不是一次脈沖的高電平了,這樣你的占空比、頻率都將計(jì)算出錯(cuò)。
3、高頻信號(hào)輸入時(shí),中斷進(jìn)入很頻繁,如果是 100 K 頻率,你需要 5 us 進(jìn)入一次(高低電平各一次,還是在占空比為 50 % 情況下,其它占空比條件更為苛刻),如果采用中斷處理方式,你必須在中斷中完成很多操作(清標(biāo)志、計(jì)算、翻轉(zhuǎn)極性等),同時(shí)你需要保證這兩次中斷不能被全局中斷禁止,或者被高優(yōu)先級(jí)中斷打斷,否則,你得到的可能就不是一次脈沖的高電平了,這樣你的占空比、頻率都將計(jì)算出錯(cuò)。
正因?yàn)橛腥缟蠁栴},而捕獲 PWM 脈沖又是比較常見的功能,所以需要一個(gè)高效的捕獲程序完成該工作。而魚鷹今天介紹的實(shí)現(xiàn)原理我認(rèn)為就是最高效的。
100K 頻率誤差 0%,占空比誤差1%!
在嵌入式中,100 K 頻率已經(jīng)算比較高的了,當(dāng)然是在關(guān)注占空比情況下,如果只關(guān)注頻率,那么可測(cè)量的頻率將更高。
可能有些人會(huì)抬杠,說,干嘛不使用 FPGA。魚鷹當(dāng)然知道有比單片機(jī)更有效的捕獲器件,因?yàn)槲易约嘿I的 邏輯分析儀 (想買這個(gè)的可以找魚鷹預(yù)定,可以給一定的優(yōu)惠,預(yù)定人數(shù)需要10個(gè)以上)就可以捕獲很高的頻率、精度,但問題在于成本,在于有必要嗎?這個(gè)邏輯分析儀可是幾百大洋啊。
閑話不多說,魚鷹首先介紹一下該捕獲方法的基本原理。
很簡(jiǎn)單,就是利用二進(jìn)制溢出特性實(shí)現(xiàn)的。(2038問題-動(dòng)圖)

這個(gè)特性魚鷹在筆記中也多次介紹了其中的應(yīng)用,比如無鎖隊(duì)列、擴(kuò)展定時(shí)器、編碼器、延時(shí)等,今天就再加一個(gè)應(yīng)用,PWM 捕獲(本篇筆記不介紹這個(gè)特性原理,可以看歷史相關(guān)筆記)。
可以說理解了這個(gè)特性,在各種整型數(shù)據(jù)處理中如虎添翼,再也不擔(dān)心數(shù)據(jù)溢出的問題,反而要利用該特性完成一些騷操作,比如今天 PWM 捕獲就是如此。
另一個(gè)絕技就是使用 DMA 了,這是它高效可靠的原因。
首先我們看看定時(shí)器的構(gòu)成框圖:

上面標(biāo)注部分就是為什么 PWM 輸入模式只能使用通道 1 或通道 2 的原因。
這里我們以TI1作為PWM輸入,兩個(gè)捕獲通道同時(shí)捕獲 TI1 為例說明。
基本配置如下:
- 捕獲通道 1 觸發(fā) DMA,同時(shí)設(shè)置 捕獲上升沿 ,這樣,只要上升沿觸發(fā)了,可以自動(dòng)完成捕獲并DMA傳輸至用戶緩存。通道 2 下降沿捕獲 ,不觸發(fā) DMA。
- 配置DMA,傳輸外設(shè)地址不是某一個(gè)寄存器,而是 DMAR,同時(shí)設(shè)置傳輸數(shù)量,這一定是 2 的倍數(shù),因?yàn)橐淮涡枰獋鬏攦纱危?2 位寬度。
- 因?yàn)樾枰獋鬏攦纱?CCRx,所以需要正確設(shè)置 DCR 寄存器。
以上配置就是整個(gè)功能最為關(guān)鍵的部分。如果你理解了下面介紹的捕獲原理,你自然知道為什么需要這么設(shè)置了。
我們首先看看 PWM 捕獲時(shí)基本工作過程:

另外還需要了解 TIM 一個(gè)很重要的DMA 傳輸特性:通過配置寄存器,可以一次觸發(fā),多次DMA連續(xù)傳輸,這個(gè)特性在這個(gè)功能中也被用上了。


如何利用這個(gè)功能呢?一般我們配置 DMA 傳輸時(shí),比如串口,一般外設(shè)地址就是 DR 寄存器。而如果我們想傳輸 TIM 的捕獲值,我們可以設(shè)置成 CCR1 寄存器的地址。
這樣也可以正常傳輸,但是只能在觸發(fā)時(shí)傳輸一個(gè)寄存器的值,如果需要把兩次捕獲值都傳輸,那么就需要配置兩個(gè) DMA 通道完成,但這里又涉及到了兩個(gè) DMA 通道同步的問題,因?yàn)槟憧隙ㄏM看尾杉膬蓚€(gè)數(shù)據(jù)都屬于同一個(gè)脈沖。
所以 TIM 用了這兩個(gè)寄存器解決這個(gè)問題,通過 ** DMAR 中轉(zhuǎn)** ,就可以完成一次觸發(fā),連續(xù)傳輸兩個(gè) CCR 的值。
想必看到這里,你應(yīng)該大概知道該捕獲的原理是什么了。
這里魚鷹再結(jié)合上圖描述一下。
初始化(定時(shí)器、DMA、GPIO)完成后,定時(shí)器就準(zhǔn)備好工作了,一旦有一個(gè)脈沖輸入,上升沿觸發(fā),此時(shí)因?yàn)樵O(shè)置了 DMA 觸發(fā),同時(shí)設(shè)置了連續(xù)傳輸兩個(gè)寄存器,所以它會(huì)把當(dāng)前的 CCR1 和上一次捕獲的 CCR2 (下降沿觸發(fā))傳輸?shù)接脩艟彺妫@是 兩次 DMA 傳輸 ,所以DMA的計(jì)數(shù)器會(huì)遞減兩次。并且 CCR1 的值比 CCR2 的值大 (不考慮溢出情況下,并且差值情況下,大小沒有意義)。這樣,上面的三次觸發(fā),我們可以得到三組捕獲數(shù)據(jù)。

通過 (uint16_t)(CCR1 – CCR2),我們可以得到 低電平 ,而通過兩次CCR1 或者 CCR2 的差值,我們可以得到 周期 。這樣計(jì)算頻率和占空比就不是什么難事了。特別需要注意的是,三次上升沿捕獲期間,定時(shí)器不可以產(chǎn)生溢出現(xiàn)象,這可以通過定時(shí)器分頻實(shí)現(xiàn)。分頻系數(shù)越小,分辨率越高,但越容易溢出。
這里要注意的是,如果頻率比較高,建議多測(cè)量幾組數(shù)據(jù),然后取后面幾組數(shù)據(jù)進(jìn)行簡(jiǎn)單平均或中值計(jì)算(具體根據(jù)捕獲值來確定),這樣準(zhǔn)確度更高一些,因?yàn)閯傞_始可能因?yàn)槌跏蓟木壒剩瑢?dǎo)致意外捕獲,這是可能的(剛開始不確定可以測(cè)個(gè) 64 組再說)。
另外如果輸入 PWM 頻率或占空比會(huì) 不斷變化 ,也需要根據(jù)情況多測(cè)幾組(或定時(shí)測(cè)),并進(jìn)行簡(jiǎn)單處理,這樣不容易剛好捕獲到變化的脈沖,保證脈沖計(jì)算的可靠性。
總之,怎么去讓你的程序更加可靠就是各位道友的事情了,魚鷹只是提供一個(gè)解決思路。另外魚鷹不準(zhǔn)備提供源碼給各位道友,自由發(fā)揮吧。如果確實(shí)有需要的話,在本篇文章更新前的時(shí)間里,道友有過贊賞或者留言被置頂或轉(zhuǎn)發(fā)支持的情況,那么也可以主動(dòng)聯(lián)系魚鷹,魚鷹可以給一份參考程序,僅供參考。以前沒有的就別找魚鷹了
-
PWM
+關(guān)注
關(guān)注
116文章
5542瀏覽量
219563 -
中斷
+關(guān)注
關(guān)注
5文章
906瀏覽量
42841 -
高頻信號(hào)
+關(guān)注
關(guān)注
1文章
144瀏覽量
22081
發(fā)布評(píng)論請(qǐng)先 登錄
脈寬調(diào)制(PWM)設(shè)計(jì)及應(yīng)用原理解析

手機(jī)通信原理解析
stm32的定時(shí)器還可以PWM輸入檢測(cè)嗎,能解釋下嗎有點(diǎn)不理解
如何理解懸浮輸入?如何理解中斷懸浮輸入
關(guān)于PWM的應(yīng)用與知識(shí)解析

這樣理解PWM,想不懂都難!


最強(qiáng) PWM 輸入原理解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論