") Haptics系統(tǒng)的工作原理和ERM/LRA的特點(diǎn)
Haptics系統(tǒng)的工作原理和ERM/LRA的特點(diǎn)
Haptics系統(tǒng)通過(guò)觸覺(jué)反饋來(lái)實(shí)現(xiàn)人機(jī)交互,用戶通過(guò)點(diǎn)觸屏幕即可完成短信、打字、游戲等各種應(yīng)用,得益于其簡(jiǎn)單方便的交互體驗(yàn),Haptics已經(jīng)成為了智能手機(jī)、平板電腦中廣泛應(yīng)用的人機(jī)交互方式。
Introduction
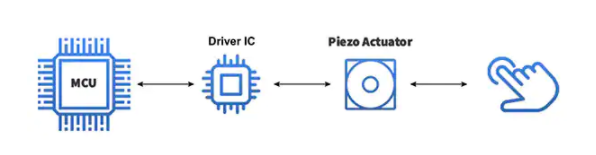
針對(duì)不同的應(yīng)用場(chǎng)景,手機(jī)廠家會(huì)設(shè)計(jì)不同的效果波形,當(dāng)屏幕控制器感應(yīng)到用戶的某種Touch操作后,觸發(fā)Processor生成一個(gè)對(duì)應(yīng)的振動(dòng)指令和驅(qū)動(dòng)波形給Haptics Driver IC,Driver IC對(duì)驅(qū)動(dòng)波形進(jìn)行放大和修正后,驅(qū)動(dòng)Actuator執(zhí)行對(duì)應(yīng)的振動(dòng)效果。
Haptics系統(tǒng)主要由以下幾部分組成:
Processor:終端設(shè)備的處理器,當(dāng)Processor接收到觸覺(jué)觸發(fā)信號(hào)時(shí),會(huì)生成對(duì)應(yīng)的振動(dòng)指令和振動(dòng)效果波形發(fā)送給Haptics Driver IC,將振動(dòng)指令和效果傳達(dá)出去。
Haptics Driver Solution:Haptics驅(qū)動(dòng)方案,對(duì)Processor產(chǎn)生的振動(dòng)波形進(jìn)行放大和修正后,驅(qū)動(dòng)Actuator產(chǎn)生振動(dòng)。針對(duì)不同的Actuator,Haptics Driver Solution有所不同,除了相應(yīng)的Driver IC,還包括必要的軟件或算法程序,下文將會(huì)展開介紹。
Actuator:振動(dòng)發(fā)生器,是Haptics系統(tǒng)中最為關(guān)鍵的一環(huán),生成振動(dòng)效果反饋給用戶,是將電能轉(zhuǎn)換為機(jī)械能的過(guò)程。常用的Actuator通常可以分為三大類:偏心轉(zhuǎn)子馬達(dá)(Eccentric Rotating Mass: ERM)、壓電馬達(dá)(Piezo)、線性諧振馬達(dá)(Linear Resonant Actuator: LRA),根據(jù)振動(dòng)方向的不同,LRA又分為Z軸LRA和X軸LRA。由于Piezo采用特殊壓電材料制成,價(jià)格相比ERM和LRA要昂貴許多,在終端設(shè)備中很少使用,本文不作討論。
2. EMR
如圖2所示,ERM主要由四個(gè)部分組成,圖片最左側(cè)的偏心轉(zhuǎn)子質(zhì)量塊用于產(chǎn)生振動(dòng);右上方的磁鐵、馬達(dá)殼、螺釘和主軸承組成ERM的定子組件;中間的無(wú)芯繞組、轉(zhuǎn)向器電機(jī)軸組成ERM的電樞組件;下方的端蓋組件用于固定和連接。將ERM固定在終端設(shè)備上,即可將偏心轉(zhuǎn)子旋轉(zhuǎn)所產(chǎn)生的振動(dòng)頻率和強(qiáng)度傳遞給終端設(shè)備。
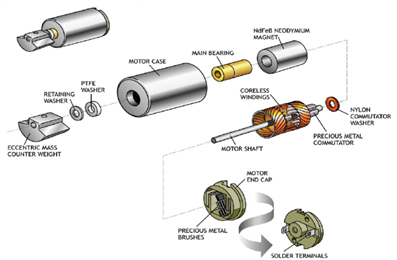
Figure 2, Eccentric Rotating Mass
ERM體積和重量都比較大,利用離心運(yùn)動(dòng)產(chǎn)生振動(dòng)效果,震感比較強(qiáng)烈,并且振動(dòng)頻率可以從1Hz到300Hz,方案簡(jiǎn)單,價(jià)格低廉。
然而,ERM的構(gòu)造決定了它的固有缺點(diǎn):首先,ERM的驅(qū)動(dòng)波形為DC波形,通常隨著輸入電壓增大,ERM的振動(dòng)增強(qiáng),但由于ERM體積和重量都比較大,需要驅(qū)動(dòng)電壓大于一定值時(shí),才能開始振動(dòng),因此相比于其他類型的Actuator,ERM的功耗通常較大;第二,ERM利用離心運(yùn)動(dòng)產(chǎn)生振動(dòng)效果,振動(dòng)響應(yīng)速度慢,起震和停止的速度都比較慢,觸覺(jué)體驗(yàn)不好。
針對(duì)ERM的特點(diǎn),TI提供了多種Driver Solution,Driver芯片集成了Overdrive過(guò)載驅(qū)動(dòng)和Brake剎車功能[2],能夠減小ERM的起震時(shí)間和停止時(shí)間,改進(jìn)ERM的觸覺(jué)反饋效果,如TI的DRV2603/DRV2604/DRV2605等Haptics Driver IC,具體設(shè)計(jì)方案可以參考DRV2605的Evaluation Kit。
3. LRA
LRA可以被認(rèn)為是質(zhì)量彈簧系統(tǒng),該系統(tǒng)的質(zhì)量系統(tǒng)在AC驅(qū)動(dòng)信號(hào)的驅(qū)動(dòng)下進(jìn)行線性運(yùn)動(dòng),產(chǎn)生所需的觸覺(jué)反饋振動(dòng)效果。不同于以DC電壓進(jìn)行驅(qū)動(dòng)的ERM,LRA需要由AC信號(hào)驅(qū)動(dòng)。若LRA在驅(qū)動(dòng)信號(hào)作用下沿Z軸振動(dòng),即為Z軸LRA;若LRA在驅(qū)動(dòng)信號(hào)作用下沿X軸振動(dòng),則為X軸LRA。相比ERM,LRA的體積更小,重量更輕,振動(dòng)響應(yīng)速度快,起震和停止的時(shí)間都很短,觸覺(jué)反饋體驗(yàn)更加清脆。
圖3為L(zhǎng)RA系統(tǒng)的頻率響應(yīng),組成LRA的質(zhì)量彈簧系統(tǒng)是一個(gè)Q值很高的諧振系統(tǒng),偏離諧振頻率的頻率響應(yīng)急劇下降。如圖3所示,LRA共振頻率可能由于制造公差和環(huán)境因素等變化而變化。因此,為了達(dá)到最大的振動(dòng)強(qiáng)度,需要確保其驅(qū)動(dòng)頻率始終能跟蹤LRA的諧振頻率點(diǎn)。
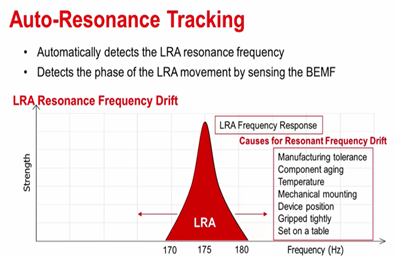
Figure 3, LRA Frequency Response
TI的Haptics Solution使用Auto-F0 Tracking算法檢測(cè)LRA的諧振頻率F0,使驅(qū)動(dòng)信號(hào)的頻率跟蹤LRA的諧振頻率F0,以實(shí)現(xiàn)LRA更好的振動(dòng)效果。下面以TI針對(duì)Z軸LRA的Haptics Solution為例,介紹TI Haptics Solution使用的Auto-F0 Tracking算法如何工作。
3.1 Z軸LRA
如圖4所示,Z軸LRA的主要由5部分組成:移動(dòng)質(zhì)量塊、彈簧、音圈、磁鐵以及端蓋組件,通過(guò)音圈的電流在移動(dòng)質(zhì)量塊上施加機(jī)械力使質(zhì)量塊上下移動(dòng),驅(qū)動(dòng)LRA振動(dòng)[1]。因?yàn)閳D4所示LRA在驅(qū)動(dòng)信號(hào)作用下沿著Z軸方向振動(dòng),故稱Z軸LRA。
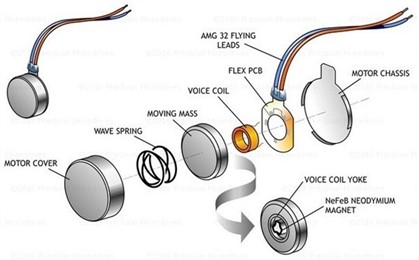
Figure 4, Z-axis LRA
TI的 DRV260X系列Haptics Solution可以直接用于Z軸LRA,集成了LRA驅(qū)動(dòng)所需的Auto-F0 Tracking算法。以圖5所示的DRV2605為例,Auto-F0 Tracking是以Back-EMF檢測(cè)模塊為核心構(gòu)成的閉環(huán)控制算法[2]。
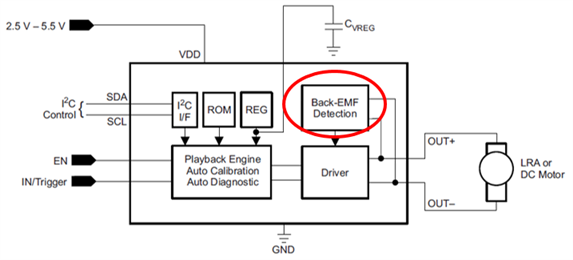
Figure 5 DRV2605 Block Diagram
Auto-F0 Tracking的原理如下:Haptics Driver施加在LRA音圈的電流將在LRA內(nèi)部質(zhì)量塊上產(chǎn)生機(jī)械力,驅(qū)動(dòng)LRA線性振動(dòng),隨著LRA內(nèi)部質(zhì)量塊的移動(dòng),LRA音圈相對(duì)于磁場(chǎng)的移動(dòng)也將產(chǎn)生反向電動(dòng)勢(shì)(Back-EMF),圖5中DRV2605的Back-EMF模塊將檢測(cè)LRA產(chǎn)生的Back-EMF電壓,根據(jù)Back-EMF電壓與頻率特性的對(duì)應(yīng)關(guān)系可以確定LRA系統(tǒng)的諧振頻率F0。
通過(guò)Auto-F0 Tracking得到的F0頻率,一方面可以應(yīng)用于驅(qū)動(dòng)振動(dòng)的波形頻率,得到更有效的振動(dòng);另一方面,也可以直接應(yīng)用于與驅(qū)動(dòng)振動(dòng)的信號(hào)反相的剎車信號(hào),使振動(dòng)停止非常迅速。這種Auto-F0 Vibration & Braking機(jī)制最終使Haptics系統(tǒng)得到清脆不拖沓的觸覺(jué)反饋效果。針對(duì)Z軸LRA的Haptics Solution可以參考DRV2605, http://www.ti.com/lit/ds/symlink/drv2605.pdf。
3.2 X軸LRA
相比ERM,Z軸LRA的振動(dòng)效果已經(jīng)有很大提升,但是由于Z軸LRA振動(dòng)方向沿著Z軸,即上下振動(dòng),在厚度比較薄的終端設(shè)備中,振動(dòng)幅度受限,而X軸LRA則解決了這一限制。
如圖6所示,X軸LRA一般為矩形,主要由5部分組成:移動(dòng)質(zhì)量塊、音圈、磁鐵、彈簧和端蓋組件。彈簧連接在質(zhì)量塊的左右兩側(cè),因此LRA振動(dòng)在X平面,具有更大的振動(dòng)空間,可以達(dá)到更大的振動(dòng)幅度。
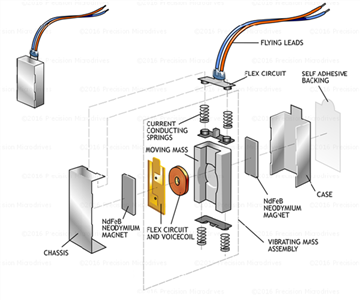
Figure 6, X-axis LRA
和Z軸LRA類似,X軸LRA頻率響應(yīng)的Q值非常高,因此也需要Auto-F0 Tracking來(lái)完成驅(qū)動(dòng)信號(hào)頻率對(duì)LRA諧振頻率的追蹤。除此之外,由于X軸LRA振動(dòng)在X軸方向,具有更大的振動(dòng)幅度,因此需要更高的驅(qū)動(dòng)電壓。
TI提供Smart Amp作為X軸LRA Haptics Driver的Solution。一方面,Smart PA內(nèi)部集成了BOOST結(jié)構(gòu),能夠提供X軸LRA需要的高驅(qū)動(dòng)電壓;另一方面,Smart PA集成了IVsense Feature可以檢測(cè)LRA的Back-EMF電壓[3],通過(guò)圖7所示的算法結(jié)構(gòu)完成LRA諧振頻率F0的追蹤和驅(qū)動(dòng)波形頻率校準(zhǔn)。
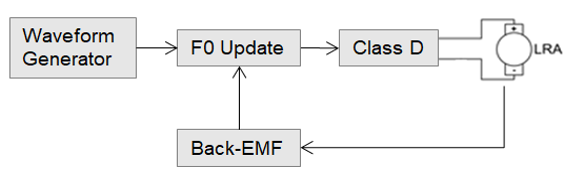
Figure 7, Auto-F0 tracking for X-axis LRA
4.Summary
綜上所述,本文詳細(xì)介紹了Haptics系統(tǒng)的工作原理和ERM/LRA的特點(diǎn),針對(duì)不同的Actuator,TI提供全方位的Haptics Solution,包括Haptics Driver IC和相應(yīng)的Driver Algorithm。隨著智能手機(jī)越來(lái)越薄,我們可以預(yù)見的是X軸LRA會(huì)得到越來(lái)越多的應(yīng)用,以幫助用戶獲得更好的觸覺(jué)反饋體驗(yàn)。
審核編輯:郭婷
-
人機(jī)交互
+關(guān)注
關(guān)注
12文章
1206瀏覽量
55382 -
智能手機(jī)
+關(guān)注
關(guān)注
66文章
18477瀏覽量
180112 -
平板電腦
+關(guān)注
關(guān)注
4文章
2016瀏覽量
77727
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
ERM 和 LRA 觸覺(jué)參考設(shè)計(jì),具有 Bluetooth? 低能耗遠(yuǎn)程
支持觸覺(jué)的游戲控制器設(shè)計(jì)
ERM 和 LRA 觸覺(jué)參考設(shè)計(jì),具有 Bluetooth? 低能耗遠(yuǎn)程
線性諧振傳動(dòng)器如何工作?
ERM&LRA觸覺(jué)驅(qū)動(dòng)程序
基于DRV2605高級(jí)觸覺(jué)驅(qū)動(dòng)器可簡(jiǎn)化消費(fèi)類和工業(yè)類產(chǎn)品的觸覺(jué)反饋設(shè)計(jì)包括原理圖和物料清單
基于ERM和LRA觸覺(jué)驅(qū)動(dòng)器的具有Bluetooth低能耗遠(yuǎn)程的參考設(shè)計(jì)
適用于LRA和ERM電機(jī)的DRV2605觸覺(jué)驅(qū)動(dòng)器參考設(shè)計(jì)
Haptics系統(tǒng)介紹
帶有針對(duì)線性諧振制動(dòng)器(LRA)自動(dòng)諧振跟蹤和針對(duì)離心旋轉(zhuǎn)質(zhì)量制動(dòng)器(ERM)優(yōu)化驅(qū)動(dòng)的觸控反饋驅(qū)動(dòng)器

探討新型壓電觸覺(jué)執(zhí)行器相比 ERM 和 LRA 的優(yōu)勢(shì)
ERM和LRA觸覺(jué)參考設(shè)計(jì) 具有Bluetooth reg低能耗遠(yuǎn)程

從ERM到X-axis LRA,TI為你提供全面的Haptics Solution
開源硬件-TIDA-00266-ERM 和 LRA 觸覺(jué) PCB layout 設(shè)計(jì),具有 Bluetooth® 低能耗遠(yuǎn)程
DRV2625 ERM、LRA觸覺(jué)反饋驅(qū)動(dòng)器評(píng)估套件





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論