") 分享車載高精定位技術(shù)發(fā)展的三大核心趨勢
分享車載高精定位技術(shù)發(fā)展的三大核心趨勢
近年來,自動駕駛技術(shù)應(yīng)用加速落地。無論是無人駕駛還是輔助駕駛,封閉或是開放場景,車輛都需要車道級的高精定位,以提前規(guī)劃,順暢地實現(xiàn)變道、轉(zhuǎn)彎、掉頭等操作,支持在各種路況環(huán)境下的安全平穩(wěn)駕駛。車道級高精定位是實現(xiàn)自動駕駛功能的關(guān)鍵支撐。
車道級定位整體架構(gòu)和目前的實現(xiàn)方法
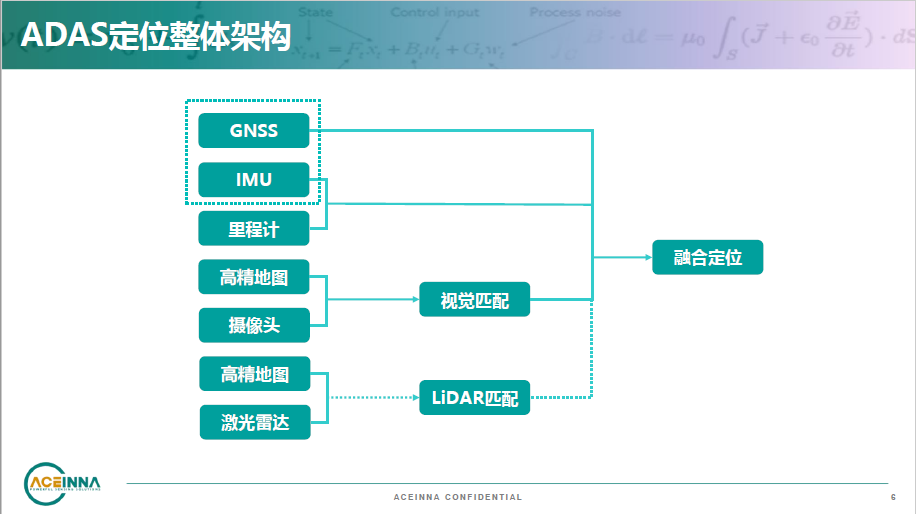
在談到目前常見的定位系統(tǒng)架構(gòu)時,盧煒解釋道:“它是所有定位信息融合后的結(jié)果。下圖的左側(cè)為高精衛(wèi)慣組合定位系統(tǒng)INS,其中包括慣性測量單元IMU、GNSS衛(wèi)星定位模塊及其配套的解算算法,這些模塊目前通常整合在零部件級的衛(wèi)慣組合定位盒子P-box中,并接入輪速計等輔助傳感器的數(shù)據(jù),最終輸出融合的INS解。該子系統(tǒng)將車輛位置、姿態(tài)和速度等信息傳輸?shù)?a href="http://www.1cnz.cn/v/" target="_blank">智能駕駛域控制器中,在域控內(nèi)部還會繼續(xù)融合其他定位信息,如攝像頭和激光雷達(dá)與高精地圖的匹配解,最終將所有信息融合起來,形成一個完整的車輛定位和姿態(tài)結(jié)果。”

基于以上背景,我們認(rèn)為車載定位技術(shù)未來會出現(xiàn)以下幾大趨勢:
趨勢一:組合定位系統(tǒng)由P-box向貼片式模組演化
“我們認(rèn)為,為了支持整車智駕系統(tǒng)更高程度的整合,零部件級別的組合定位子系統(tǒng)將被“打散”成模組。”
這其中有兩個關(guān)鍵詞,“模組化”及“貼片式”。

為什么要模組化?
“從整體視角去看,組合定位系統(tǒng)單獨存在的必要性正在逐漸降低。”盧煒解釋道,“正如以上提到,對于現(xiàn)在的智駕系統(tǒng),真正完整的定位是融合了包含攝像頭在內(nèi)的各種傳感器定位的結(jié)果。而過去的智駕域控制器架構(gòu)里面并沒有預(yù)留GNSS及IMU,所以這兩個組件就只好合并起來,作為單獨的零部件(P-box)存在,來滿足當(dāng)時的需求。”
“針對當(dāng)時階段性的需求,新納也開發(fā)了自己的P-box產(chǎn)品,并取得了非常好的乘用車前裝量產(chǎn)案例,出貨量已達(dá)數(shù)萬臺。但我們更看好模組化的發(fā)展趨勢,因此從三年前就提前做了布局。”盧煒補充到。
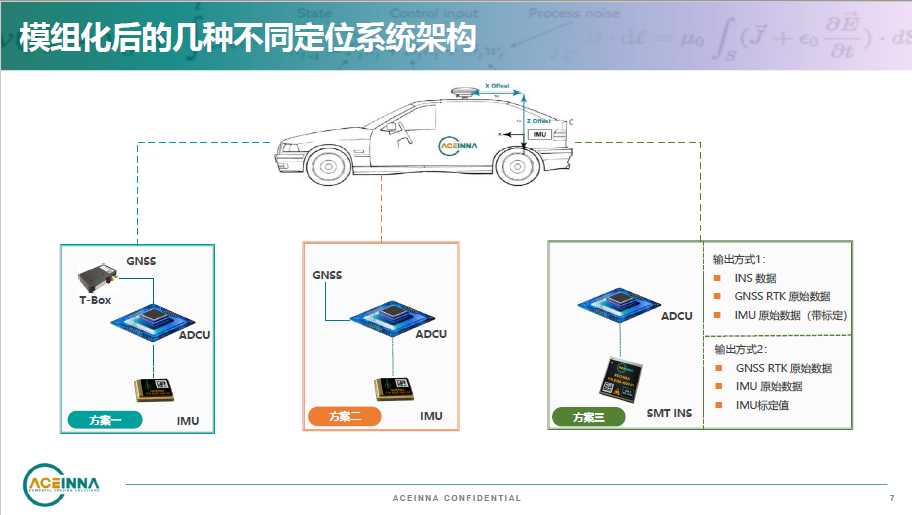
模組化后,會有更靈活的定位系統(tǒng)架構(gòu)供選擇。第一種架構(gòu)只需在智駕域控內(nèi)放置一個高精度IMU模組即可,GNSS信息可直接從T-box接收并在智駕域控內(nèi)進(jìn)行融合。第二種適用于智駕域控內(nèi)已安裝GNSS芯片的情況,在域控中再放置一個高精度IMU模組即可。第三種則是將IMU與GNSS組成的INS模組集成到域控內(nèi),以減少芯片模組數(shù)量,這些方式盡可能地簡化了硬件配置且更靈活。
那么“貼片式”模組的優(yōu)點有哪些?
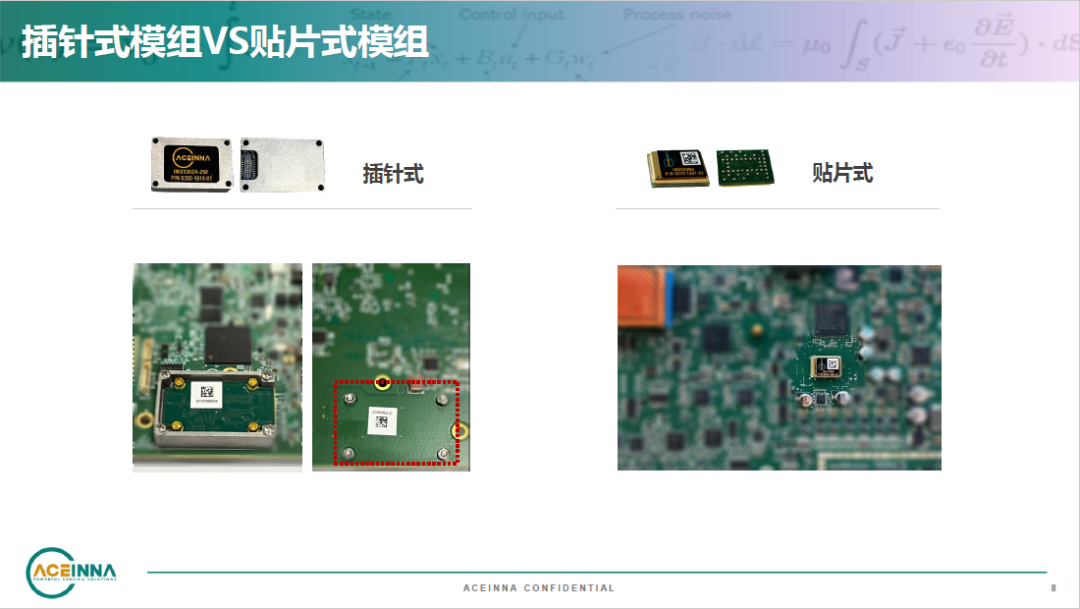
在高精度定位行業(yè),插針式模組是目前更常見的。模組外部用堅固的鋁合金殼封裝,并通過插針固定在域控制器上。這樣做的好處是,IMU是一種非常精密的傳感器,對溫度和振動都非常敏感。而鋁合金殼能隔絕外部干擾,更易于保證IMU的性能。
但這種方式也帶來了明顯的限制,插針式模組集成到智駕域控制器的電路板上非常麻煩,需要打螺柱或螺釘,有時甚至需要打通孔并在背面放置螺帽。這與電路板上的大部分用表面貼裝工藝即可集成的芯片和模組很不同,會大幅降低生產(chǎn)效率;另外插針式的接口在車輛經(jīng)歷較強(qiáng)振動時,也容易造成接觸不良而丟失數(shù)據(jù)的情況。
相比之下,貼片式模組的集成簡便很多。貼片式模組可通過回流焊工藝直接貼在域控制器電路板上。大幅提高生產(chǎn)效率和保證質(zhì)量。
雖然貼片式模組有諸多優(yōu)點,但仍有困難需要克服。
首先是溫度問題。隨著智能駕駛域控制器算力不斷提高,域控制器內(nèi)部溫度變化也變得更劇烈。IMU作為對溫度非常敏感的傳感器,在未經(jīng)精密校準(zhǔn)時測量偏移會隨著溫度變化而改變,因此需要對每個IMU芯片進(jìn)行大量的校準(zhǔn)工作來抵消溫度劇烈變化帶來的性能漂移。第二個問題是貼片回流焊工藝帶來的應(yīng)力變化。回流焊焊點從高溫冷卻固化時會給電路板造成額外的應(yīng)力。高精度IMU對外部應(yīng)力非常敏感的,因此需要通過精巧的結(jié)構(gòu)設(shè)計和后期處理算法抵消應(yīng)力影響。
除了溫度和回流焊應(yīng)力之外還有一些挑戰(zhàn),比如振動、電磁干擾、提高集成度等等。盧煒分享道,新納基于二十多年技術(shù)積累,已一一攻克上述難點,成功研發(fā)并量產(chǎn)了貼片式IMU模組及INS模組,積累了豐富的項目落地經(jīng)驗。
“新納貼片式IMU模組目前已經(jīng)經(jīng)過了前裝量產(chǎn)項目的驗證,我們針對貼片式IMU模組在經(jīng)歷回流焊前后的性能做了對比:結(jié)果顯示,即便經(jīng)過高溫回流焊、冷卻和應(yīng)力殘留等階段,陀螺儀、加速度計的零偏不穩(wěn)定性、角度隨機(jī)游走等重要參數(shù)仍然可以被控制在很小的變化范圍內(nèi),仍然能夠支持L2+級別的NOA、NGP等應(yīng)用。”

據(jù)盧煒介紹,除了IMU模組,新納融合了GNSS+IMU的INS模組也有量產(chǎn)案例。
“例如新納的RTK330LA,這款貼片式INS模組已經(jīng)應(yīng)用于國內(nèi)領(lǐng)先智能駕駛卡車的域控制器上,已經(jīng)支持客戶商業(yè)化運營近3000萬公里,其可靠性和性能達(dá)到了行業(yè)主流水平,與目前市場上其他零部件級P-box產(chǎn)品不相上下,甚至在某些方面更具領(lǐng)先優(yōu)勢。同時,在近3000萬公里的商業(yè)化運營中,該產(chǎn)品在穩(wěn)定性、可靠性和抗電磁干擾等方面表現(xiàn)優(yōu)秀。”

趨勢二:IMU性能持續(xù)提升
“我們認(rèn)為,IMU傳感器在整個定位系統(tǒng)中具有非常獨特的地位,因此需要不斷提升其性能。”
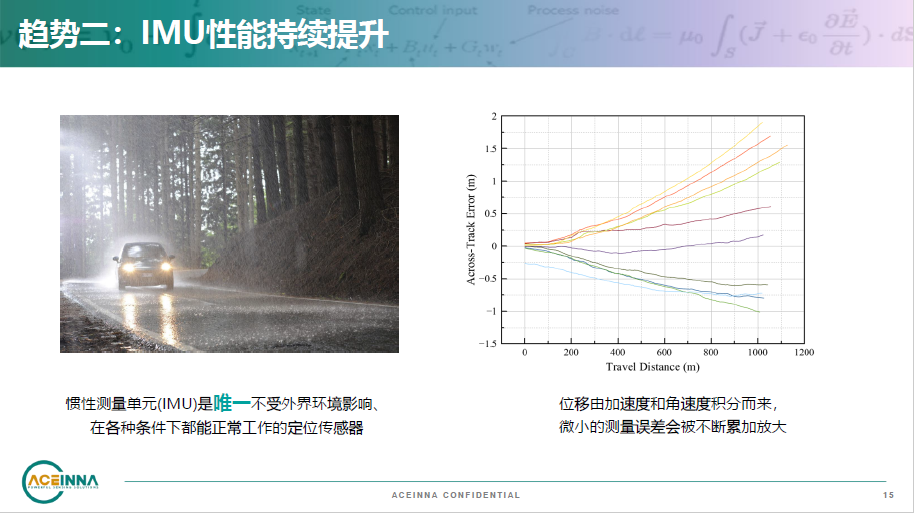
智能駕駛車輛上所有可用的傳感器中,IMU是唯一一個不受外界環(huán)境影響,在各種天氣、光照、路況條件下都能正常工作的傳感器。但其有一個天生的缺點,它只能直接測量加速度和角速度,由此推算出的車輛的位移由其累加得來,而微小的測量誤差會被不斷累加放大。這是無法避免的特性問題,只能用硬科技來解決。
“在過去幾年,新納一直在不斷升級IMU性能,目我們IMU的零偏不穩(wěn)定性已經(jīng)改善了近一個數(shù)量級,達(dá)到1.5度/小時,基本能滿足目前L2+自動駕駛高精定位要求。”盧煒表示,目前新納下一代自研IMU芯片正在開發(fā)過程中,性能會進(jìn)一步大幅提升。
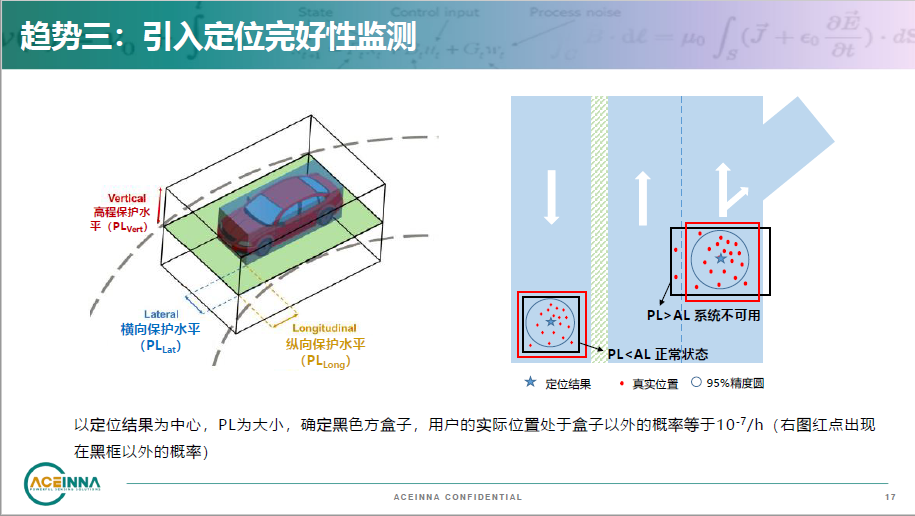
趨勢三:引入定位完好性監(jiān)測
定位完好性是此前行業(yè)內(nèi)基本未涉及的概念,簡而言之就是使INS有了“自知之明“,在給出定位結(jié)果的同時,也給出了該結(jié)果的置信程度,同時通過定位完好性監(jiān)測算法就可以提前預(yù)警上級系統(tǒng)。
據(jù)悉,新納在定位完好性方面應(yīng)用屬于行業(yè)首創(chuàng),目前已經(jīng)引入到新納INS模組和P-box相關(guān)產(chǎn)品中。
新納傳感扎根中國,布局全球
新納傳感總部位于無錫,并設(shè)有研發(fā)和生產(chǎn)基地,在波士頓、芝加哥及硅谷設(shè)有全球研發(fā)中心。新納脫胎于美新半導(dǎo)體,主要生產(chǎn)加速度計,并逐漸將能力拓展到整個IMU和定位模組、定位系統(tǒng)等領(lǐng)域;2017年,新納從美新半導(dǎo)體獨立出來,憑借在慣性傳感器領(lǐng)域20多年豐富經(jīng)驗,專注于為汽車、工業(yè)等領(lǐng)域提供高性能定位解決方案。新納擁有強(qiáng)大的研發(fā)實力及制造能力, 70%以上都是研發(fā)人員,具備全方位的溫度補償和校準(zhǔn)能力,并擁有豐富的合規(guī)和量產(chǎn)經(jīng)驗,目前慣性導(dǎo)航產(chǎn)品累計出貨量超100萬件,在行業(yè)內(nèi)處于領(lǐng)先地位。未來,新納將繼續(xù)發(fā)揮產(chǎn)品及技術(shù)優(yōu)勢,賦能各個行業(yè)快速發(fā)展。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2550文章
51046瀏覽量
753119 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
360瀏覽量
21557 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3971瀏覽量
189836 -
自動駕駛技術(shù)
+關(guān)注
關(guān)注
4文章
97瀏覽量
14997
原文標(biāo)題:車載高精定位技術(shù)的三大發(fā)展趨勢
文章出處:【微信號:gh_fa70fba31167,微信公眾號:新納傳感】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
納微半導(dǎo)體亮相2024亞洲電源技術(shù)發(fā)展論壇
高通分析藍(lán)牙技術(shù)發(fā)展趨勢
智能密集架控制系統(tǒng)技術(shù)發(fā)展趨勢
直流高壓電源技術(shù)發(fā)展淺析
開關(guān)電源的最新技術(shù)發(fā)展趨勢
未來的ar技術(shù)發(fā)展趨勢
是德科技亮相第三屆車載網(wǎng)絡(luò)和通信架構(gòu)技術(shù)及標(biāo)準(zhǔn)研討會
智能駕駛技術(shù)發(fā)展趨勢
高精度融合定位技術(shù)的原理、應(yīng)用領(lǐng)域以及未來發(fā)展趨勢

未來隧道定位導(dǎo)航技術(shù)有哪些發(fā)展趨勢






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論