 有關AGV底盤結構的詳細概述
有關AGV底盤結構的詳細概述
AGV底盤是自動導航車輛(AGV)的重要組成部分。其結構設計的好壞直接影響著AGV的穩定性、速度、載重能力等多個方面。本文將對AGV底盤結構進行深入分析。
一、單舵輪驅動結構【適合1T以上負載,牽引車,叉車類應用場景】
單舵輪驅動結構是最簡單的結構之一,其結構由1個舵輪和2個定向輪組成,在叉車上面有著非常廣泛的應用。這種結構可以直接適應各種地面,保證驅動舵輪一定著地。根據車重心分布的不同,舵輪是大概會承擔50%的自重,所以牽引力非常強。 但其缺點也顯而易見,單輪驅動的AGV在行駛過程中容易發生偏移,并且轉彎時需要采用一定的技巧進行控制。
單舵輪驅動
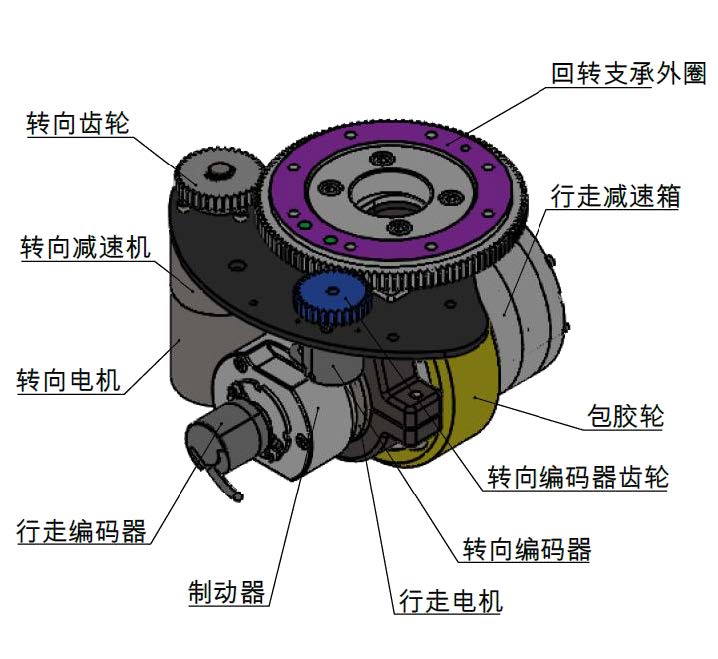
二、雙舵輪驅動結構【適合1T以上負載,同時要求可以任意方向平移的場合】
雙舵輪驅動結構是目前市場上最常見的結構之一,其結構由兩個驅動輪和一個或多個非驅動輪組成,通常應用于中等載重的AGV上。由于其結構設計合理,可以更好地保持AGV在直線行駛時的穩定性,并且轉彎時無需特殊技巧,因此在市場上得到了廣泛應用。
雙舵輪底盤常見的2種結構形式有:
1)舵輪居中布置:舵輪布置在車體中心線上,前后對稱布置,直線行走時,前后舵輪調整同樣的角度實現路徑偏移調整,自轉時,左右舵輪轉動90度,變成差速式,可實現自轉。
2)舵輪對角布置:舵輪中心對稱布置,運動形式相較中心線布置時調整較為復雜。
雙舵輪驅動1
雙舵輪驅動2
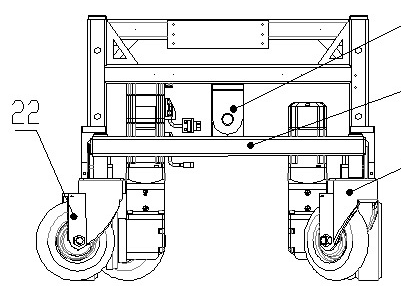
三、兩輪差速驅動結構【適合500KG~1.5T負載的AGV,可以原地旋轉,不能平移】
兩輪差分驅動底盤可以分2種:3輪結構、6輪結構。
①3輪結構:2個驅動輪、1個萬向輪。在服務機器人上應用較多。但其缺點是:原地旋轉時,占用空間較大。因為是3輪結構,所以輪與車架采用剛性連接就可以。
②6輪結構:2個驅動輪在中間、4個萬向輪在車的4個拐角。6輪結構,必須做特殊浮動處理,才可以保證2個驅動輪始終受力著地。
兩輪差速驅動
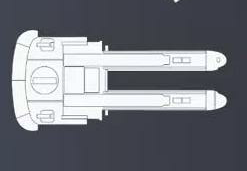
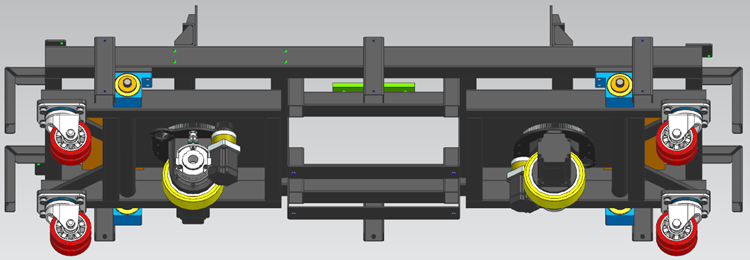
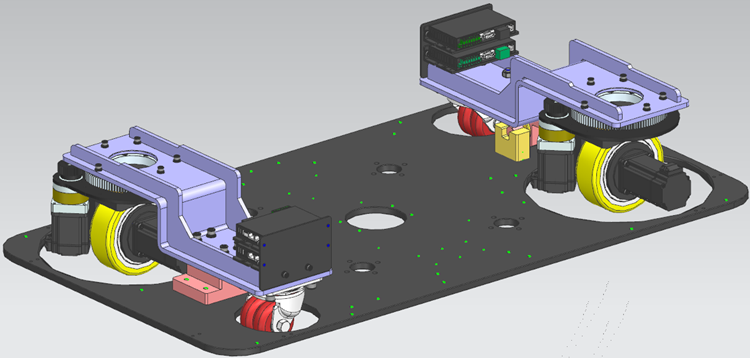
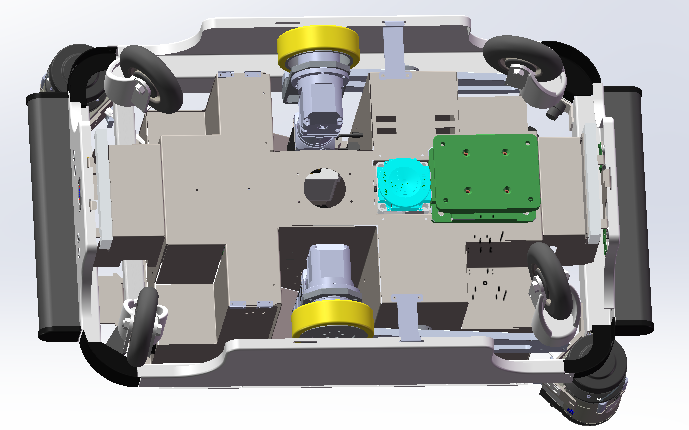
四、麥克納姆輪驅動結構【適合運行頻率較低、同時要求任意方向(固定)平移和旋轉的場合】
麥克納姆輪底盤由4個麥克納姆輪組成,麥克納姆輪的滾軸傾斜角必須按照下圖布置。
該底盤的優點是:可以任意方向平移或旋轉,是運動靈活度最好的底盤。
運動學要求4個輪子必須同時著地,這樣才可以達到理想的運動控制。4個輪子如果剛性與底盤連接,根據3點確定1個平面的原理可以知道,其中1個輪子必然懸空或受力很小。為了解決該問題,有如下2種建議方式:
1)將前面或后面2個輪子使用彈簧做成上下浮動結構。
2)將前面或后面2個輪子做成一組浮動橋臂。所謂的平衡橋臂就是1根桿上面左右固定2個輪子,中間做一個鉸接軸和車架固定。使2個輪子合并為1個受力點。從而使4個麥克納姆輪都可以同等受力。
麥克納姆輪驅動
總的來說,AGV底盤的結構設計應根據自身的使用環境、載重和行駛速度來進行選擇。在選擇時,需要注意的是結構的穩定性、驅動能力、轉彎半徑等因素,同時要考慮生產成本和維護成本的平衡。
底盤最終性能要求:
1)面對各種高低起伏的路面,所有驅動輪必須著地,這樣驅動輪才可以正常傳遞牽引力,否則出現懸空打滑的現象。
2)空載和滿載狀態下,傳遞到驅動輪上面的正壓力足夠大,足以驅動上爬設計坡度。
最大牽引力=驅動力正壓力x驅動輪摩擦系數
需要克服阻力=滾動摩擦阻力+自重在坡度方向的分量
審核編輯黃宇
-
底盤
+關注
關注
3文章
247瀏覽量
14697 -
AGV
+關注
關注
27文章
1316瀏覽量
41142
發布評論請先 登錄
相關推薦
用于半導體外延片生長的CVD石墨托盤結構
AGV地面常見要求

智能底盤持續發展,底盤域MCU的國產機會



你想要的AGV小車減震結構,鳳凰動力都為你梳理清楚了
AGV讀卡器在AGV自動搬運小車上應用方案

鳳凰動力AGV舵輪大揭秘!
AGV選型要點及步驟,保證企業選擇的AGV小車更實用

AGV小車使用避障雷達
AGV小車升降平臺控制板







 工商網監
工商網監
評論