 簡述數字電源的基本原理
簡述數字電源的基本原理
數字電源的關鍵是電源管理、控制信號的數字化處理,其基本要求是:在保障穩定性的前提下,具有快速性、平穩性和準確性。下面以負載點變換器(POL)為例說明數字電源控制功能的實現原理和方法。
負載點變換器(POL)通常用于將直流輸入電壓(一般為5V~12V)調節成適用于負載要求的直流輸出電壓(0.7V~3.3V)。例如,在典型的基于降壓(Buck)開關變換器的電路中,Buck變換器包含一個脈沖寬度調制(PWM)主控制芯片,一對主功率開關和一個由儲能電感和電容構成的低通濾波器。在脈沖寬度調制控制芯片中,一個電阻分壓器對電源的輸出電壓進行采樣,誤差放大器將該輸出電壓與直流參考電壓進行比較從而產生電壓誤差信號,誤差信號是一個強度與所需的輸出電壓校正成正比的模擬信號。通過具有某種控制規律的誤差補償器(Compensator)進行放大后,其輸出進入脈寬調制器(PWM),經過與載波(通常為鋸齒波或三角波)比較之后產生脈沖波,從而控制功率開關(通常為MOSFET)的導通與關斷。由于MOSFET具有較大的輸入門電容,因此驅動器電路有必要有效率地導通和關斷它們。另有固定電阻電容網絡一般會作為補償回路,以確保動態響應和穩定性之間的正常平衡。
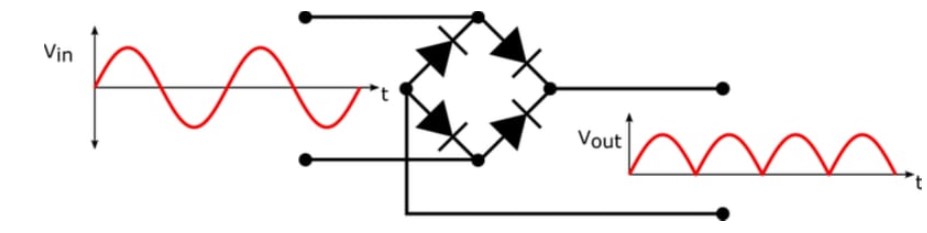
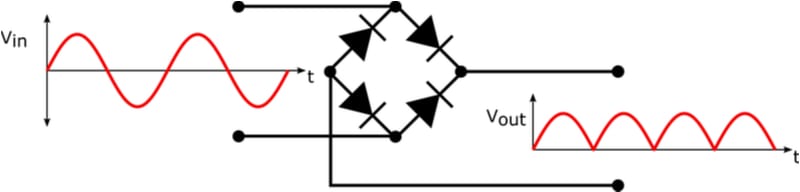
電源的兩個其它主要部分是輸入和輸出濾波器網絡。這些部分由感應器、電容和電阻構成,可以提供數種功能。輸入濾波器有助于保護電源不受電源電壓瞬態的影響,在動態負載變化過程中提供一些能量存儲,并附帶濾波器網絡以使電源滿足其輸入引起的發射規范。輸出濾波器穩定輸出電壓以確保電源滿足其紋波和噪聲規范,此外還存儲能量以幫助維護負載電路的動態電流要求。重要的是,對于模擬或數字控制結構而言,輸入和輸出濾波器以及電源器件將基本上保持相同。
在典型的數字電源控制系統結構中,輸出電壓感應排列類似于模擬系統。但是,模數轉換器(ADC)代替了模擬系統的誤差放大器,從而將感應到的模擬電壓值轉換成二進制數。除了輸出電壓之外,了解電源的輸出電流和溫度等其它模擬參數也非常有用。雖然獨立的ADC可以感應每個參數,但是采用單個ADC并在它前面加設一個多路復用路往往是更加常用的方法。多路復用器(MUX)則將在要測量的模擬輸入之間切換,并依次將每個輸入發送至ADC.
由于MUX和ADC的采樣速率是固定的,因此ADC對每個參數都輸出一系列數字,每個數字由己知的時間段分隔。這些值供給為系統提供處理能力的微控制器。卡上程序內存存儲著微控制器的控制算法,這些算法負責執行一系列有關ADC的輸出值的計算。這些計算的結果包括誤差信號、想要的驅動器級脈寬、各種驅動器輸出的最佳延遲值以及回路補償等參數。有了這些參數,數字脈寬調制器(DPWM)就可以通過驅動后控制外接的功率MOSFET,而電源管理部分也可以通過一定的接口及協議與外界通信了。模擬系統的外部回路補償元件此時變得不再是必需的。輸出電壓、輸出電流和溫度限制等參數的參考值在生產期間被保存在非易失性內存中,或者可以通過PMBus輸入。在系統啟動時,數據會由EEPROM下載到數據內存中,主芯片據此控制模塊的工作狀態。同時,可以通過一定的外部操作來重新讀入EEPROM中的默認設置。
-
電源管理
+關注
關注
115文章
6177瀏覽量
144448 -
數字電源
+關注
關注
28文章
513瀏覽量
109299 -
控制信號
+關注
關注
0文章
164瀏覽量
11957 -
POL
+關注
關注
0文章
81瀏覽量
27460
發布評論請先 登錄
相關推薦
電源設計的基本原理與關鍵部件
無線充電的基本原理是什么

電源設計的基本原理,電源的關鍵部件有哪些?
AC/DC電源模塊的基本原理與應用






 工商網監
工商網監
評論