") 新手學習FOC的誤區(qū)
新手學習FOC的誤區(qū)
作者簡介:
從事三相異步電機和永磁同步電機的控制開發(fā)工作十余年,精通無感FOC控制。涉及產品包括變頻器,伺服,電動工具,吸塵器,螺旋槳,無人機,空壓機等。功率范圍包括100W~100kW,電壓范圍包括14VDC~660VAC。
從2020年開始在知乎和公眾號做技術分享,一貫的理念是尊重知識,尊重勞動,尊重版權,持續(xù)性輸出價值。期待所有同行獲得足夠的報酬,越來越多人愿意從事電機控制行業(yè)。
在和讀者朋友們的交流中,有很多朋友學習FOC往往有一些誤區(qū)。
有些朋友是從方波過渡到FOC,有些是學習了FOC好幾年,進步很慢。各種誤區(qū)讓大家陷入了瓶頸,久久走不出來。
通過這篇文章,把相關的一些經驗整理出來,供大家參考,希望能幫助到各位少走彎路。
1、把SVPWM當成算法
很多初學者,或者從方波轉FOC的工程師,老是咨詢FOC是如何換向的?FOC的6個管子是怎么開關的?用到了什么算法?
SVPWM對于FOC是很重要的,具有較高的電壓利用率,諧波小。但是SVPWM并不是一類算法,而是一種DC-AC逆變的手段,更歸屬于電力電子的范疇。
看FOC的整體框圖:
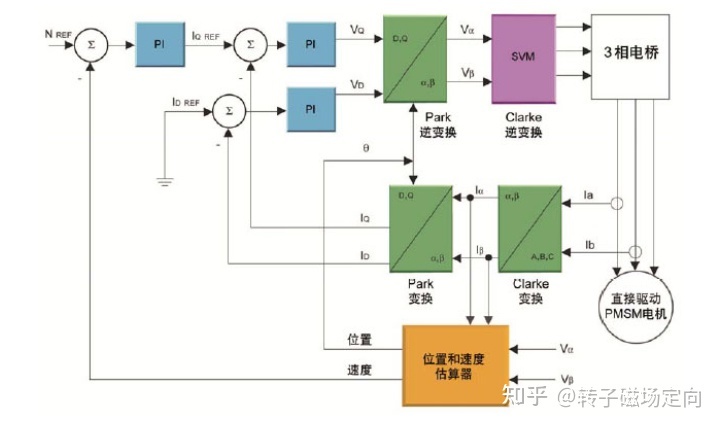
FOC框圖
SVPWM輸入是alpha和beta軸電壓,輸出是三相PWM占空比。通俗的說,SVPWM可以當作一個理想電壓源,控制逆變器實現對參考電壓的輸出。我的習慣,SVPWM就當作一個黑盒子,按照電流環(huán)的輸出作為輸入指令,輸出PWM比較值。
基本上市面上的產品以七段式SVPWM為主,除了過調制那部分,其他部分基本是一致的。所以SVPWM并不是FOC最核心的東西,主要精力或者重點應該放在觀測器和環(huán)路上。
至于換向,因為SVPWM的上下橋是加入死區(qū)后互補式的開關邏輯,并不像方波控制,可能出現長時間上下橋都不開的情況,所以FOC并沒有換向這個說法,就是逆變器開關管導通或者續(xù)流二極管續(xù)流,這樣子電流是連續(xù)的。
2、把PI當成算法
很多新手習慣把PI當成算法。
嚴格的來說,PI調節(jié)器是個濾波器或者按照《自動控制原理》的理論,是一個校正環(huán)節(jié)。比如,以電流環(huán)為例:
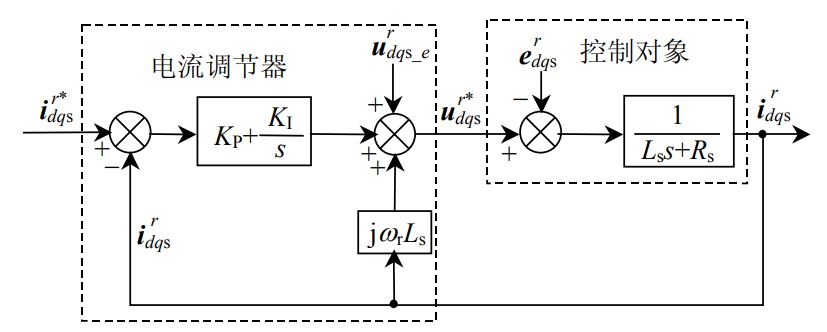
從上圖可以看出,PI調節(jié)器串聯在電流環(huán)的回路里,通過合理的配置參數,實現對傳遞函數的降階,最后電流環(huán)等效成了一個低通濾波器。
總體來說,PI更多是帶寬的整定,算不上多么高深的算法,主要精力還是放在位置估算之類的觀測器上。
3、不重視MATLAB
很多工作很多年的工程師很反感使用MATLAB,覺得自己電機轉的挺好的,寫寫代碼調調參數電機就轉起來了。當然搞了十幾年還是只會個SMO+PLL。
在開發(fā)新的方法,或者環(huán)路分析對比,參數敏感性分析,MTPA分析,Simulink是非常好用的方法。
結合我個人的經歷來看,如果不堅持使用MATLAB,那么絕對會陷入到調參數的瓶頸中,很難進步。
4、糾結于代碼和資料
很多人一上來就問,有沒有代碼賣?有沒有資料賣?
其實電機控制的核心真的不是代碼,代碼只能輔助你入門。要提高,關鍵是得掌握FOC開發(fā)的一套流程或者方法,補充理論基礎,做仿真,做實驗。買來的代碼如果基本功不夠,根本領會不到代碼的核心思想,關鍵問題還是要打好基本功。
現在浮躁的風氣很嚴重,要么想著轉互聯網拿高薪,要么想拿到代碼快速把電機轉起來。
假設能買到不錯的代碼,把項目做成了。現在技術都是不斷革新的,下一代產品如何開發(fā)呢?存在的問題如何優(yōu)化升級呢?就靠無腦調參數嗎?
這個東西就跟郭靖練降龍十八掌一樣,如果他沒跟江南七怪傻乎乎練了十幾年的基本功,只怕早就走火入魔了。學技術跟學功夫一樣,要走正路,堅持科學的方法打好基礎。走邪路求快只會走火入魔。
資料也一樣,其實我學習用的資料不多,就是四本基礎教材。《電機學》,《電力拖動自動控制系統(tǒng)》,《自動控制原理》,《電力電子技術》。在看書的基礎上,再看一些IEEE文獻和知網文章。這些東西都是開源的,但是很多人想著買點資料一步登天。
很多網上的資料,編寫者都是站在自己的角度總結的,你沒有經歷當時項目的具體問題,是很難體會到資料總結的精髓。這個就跟練功一樣,洪七公說過,貪多嚼不爛。楊過練了一大把神功,但是每樣都不精。直到自己苦練18年原創(chuàng)出了黯然銷魂掌才真正步入頂尖高手的行列。
不用貪圖網上的資料,打好基本功,自己用心去做幾個項目用心總結,付出時間和汗水獲得的東西才是別人拿不走,復制不了的。
5、把電機當成RL
有的工程師分析電機低速性能,比如低速用高頻注入,有人說高頻注入會影響電流上升速度。我說不會影響。因為在電壓足夠用情況下,低速下電流上升的速度取決于電流環(huán)的帶寬,帶寬高,電流上升快。
但是這名工程師振振有詞,說低速下,高頻注入占用了一部分電壓,然后定子電阻的壓降在同樣電流下相同,這樣子用了高頻注入導致電感上的電壓小了,電壓除以電感變小了,導致電流上升率就小了。。。。
當時我看了這個回答真的是內流滿面。。。。完全是按照方波的思路在分析?完完全全把電機當成RL負載啊。
就以這個問題為例,我來解讀如下:
5.1,電機除了RL最重要的就是反電勢,在高速或者動態(tài)下,反電勢的占比是很大的。在分析動態(tài)情況下,千萬不能忽略反電勢的影響。電機絕對不是RL啊,沒有反電勢那磁場干什么用?磁場不起作用哪來的轉矩啊?這是基本的電機模型都沒弄明白。。。要加強基礎啊!
5.2,即使電壓除以電感導致電流上升率低了,就一定導致電流上升慢?電流除了幅值就沒有相位嗎?轉矩是q軸電流產生,你能保證就恰好導致q軸電流上升慢,而不是d軸?電壓和電流就沒有相位,上來除了就是能產生結論?
5.3,電機是個非線性的模型,尤其在FOC控制里,電流,速度,轉矩,這些控制量都是用環(huán)路來實現的。那么分析這些對象要有環(huán)路的概念,環(huán)路決定了上升速度,過沖,穩(wěn)態(tài)誤差等等各種關鍵指標。這些東西不都是《自動控制原理》上的白紙黑字嗎?加強基礎啊。
5.4,這個問題用simulink仿真對比一下不就知道了嗎?就是不愿意用。。。
6、以為滑模或者龍伯格就是萬能的
很多初學者做低壓電機控制出身,看一些芯片公司的文檔入門。這個行業(yè)用的最多的就是滑模或者龍伯格,然后就覺得這個方法是萬能的,是無敵的。。。
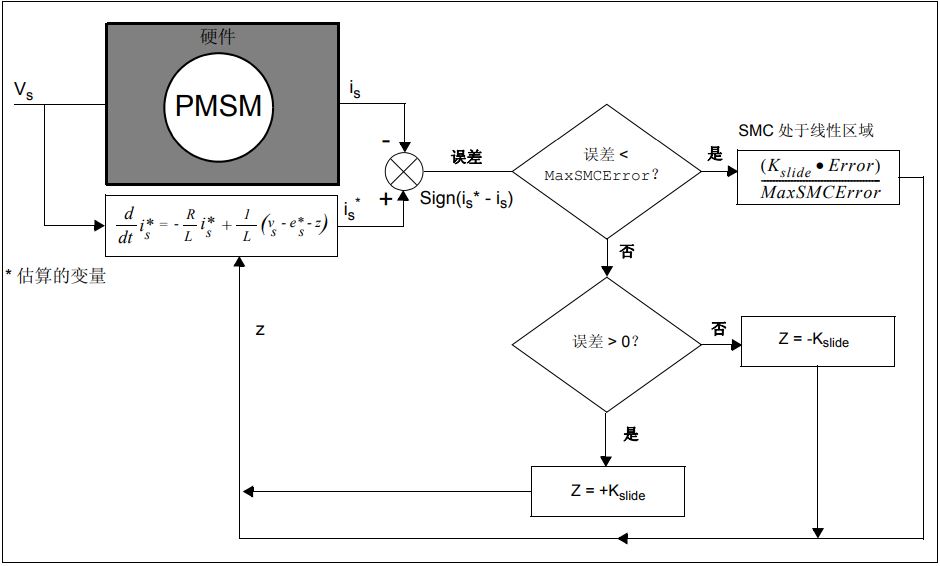
SMO框圖
PMSM/BLDC的無感FOC方法,總體有三大類:
分別是基于凸極性的高頻注入,基于磁鏈的模型,基于反電勢的模型。其中滑模或者龍伯格僅僅只是基于反電勢模型里的兩種方法,而且這兩種方法缺陷也很明顯。低速沒有帶載能力,這是基于反電勢模型的通病。
就算是基于反電勢模型的方法,還有基于不同坐標系的拓展反電勢或者其他衍生的方法。
思路要開闊一些,除了滑模還有很多種方法,尤其是不同于工況或者需求要進行調整。
而且龍伯格不適合無感FOC,其最優(yōu)應用場景是電動汽車或者伺服,在知道角度的前提下進行速度估算,這樣子其速度是沒有相位滯后的,很適合高性能場合,魯棒性好。
7、不重視理論基礎
除了以上問題,還有一點就是不愿意看書,不愿意夯實理論基礎。
比如,很多人對帶寬不了解,對Z變換不愿意學習,這是《自動控制原理》上的基礎。
調速范圍不了解,很多工作十幾年的工程師都不知道什么是調速范圍。調速比是最能反應高低速帶載極限的,比如24V/50Hz的電機1Hz帶滿載,和24V/500Hz的電機實現1Hz帶滿載,這難度能一樣嗎
很多人就問,最低幾Hz帶滿載?上述兩個電機都是1Hz帶滿載的話,他們的低速帶載極限是一樣的嗎?
我的建議就是踏踏實實,花個一年時間好好打牢基礎,再去考慮其他的事情。建摩天大樓的前幾年都是在地下默默努力,打好了地基幾天就是一樓層啊。
8、不重視采樣觸發(fā)點和PWM生效機制
這一點是很多工程師容易忽視的,PWM計數器一般是up-down模式。
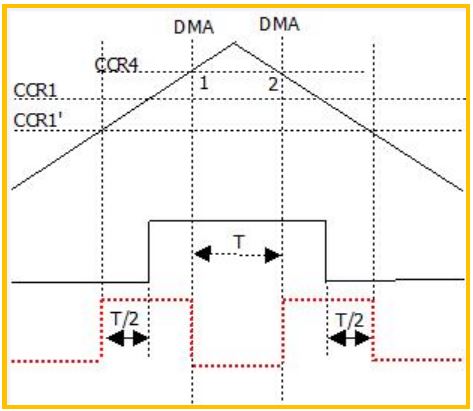
PWM采樣點配置
在三角波的頂點還是底點采樣?采樣值在什么時候更新?
中斷在什么時候計算結束?PWM比較值在什么時候更新?
雙電阻和單電阻,在采樣配置,PWM比較值生效有什么區(qū)別?
在高開關頻率下,不同的PWM比較值生效機制,對角度估算有什么影響?
以上問題,因為離散采樣和計算造成對實際的估算結果有些影響,并不是算法層面造成的,屬于硬件級的問題。如果不考慮清楚,在高速電機或者單電阻采樣上會有問題,或者增大估算誤差。
最后的話
以上就是我總結的一些FOC學習的誤區(qū),歡迎大家留言補充。
審核編輯黃宇
-
電機控制
+關注
關注
3534文章
1876瀏覽量
268750 -
FOC
+關注
關注
20文章
322瀏覽量
42798
發(fā)布評論請先 登錄
相關推薦
新手福音:概述學習FPGA的一些常見誤區(qū)
嵌入式系統(tǒng)的知識學習及誤區(qū)
新手學習PADS的三個誤區(qū)
有感FOC算法學習與實現總結
FOC學習記錄
關于FOC的知識學習
【老手經驗】FOC電機控制究竟該如何學習?


新手學習單片機最常見的六大誤區(qū)!






 工商網監(jiān)
工商網監(jiān)
評論