") T-BOX系統(tǒng)解決方案深度剖析之接口
T-BOX系統(tǒng)解決方案深度剖析之接口
遠(yuǎn)程信息處理控制單元(TCU或T-BOX)是一種嵌入式車載系統(tǒng),可應(yīng)用于車輛的無線跟蹤與通信等領(lǐng)域。
接口概述:
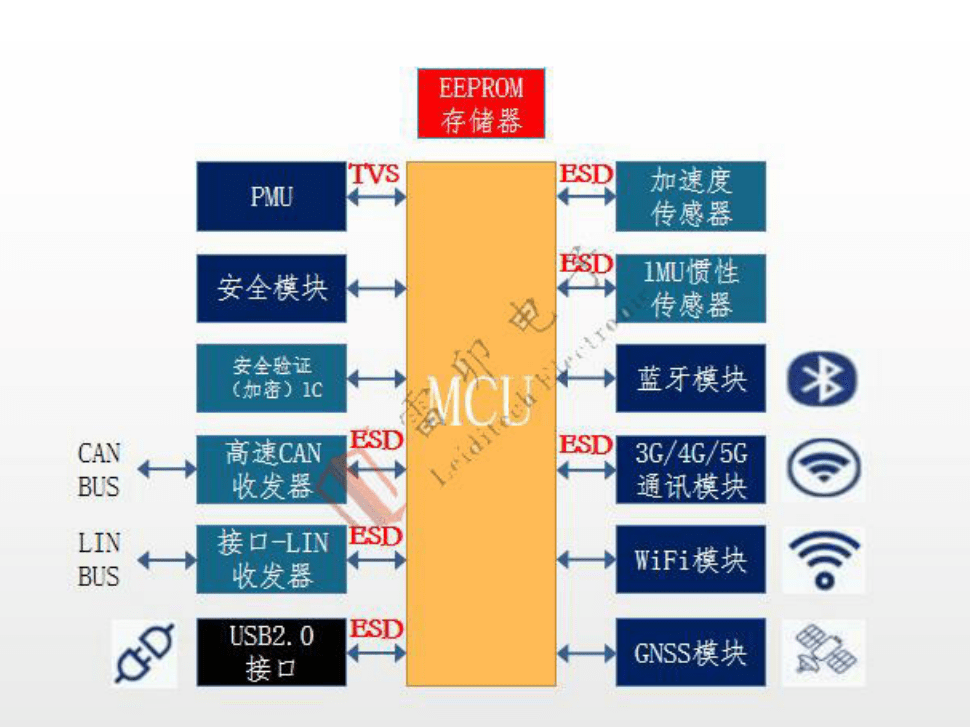
如下圖-1所示,T-BOX有各種各樣的接口與總線相連,不僅包括傳統(tǒng)的控制器局域網(wǎng)CAN(Controller Area Network)、局域互聯(lián)網(wǎng)絡(luò)LIN (Local Interconnect Network)以及調(diào)試接口RS232/RS485/USB2.0,還包括了汽車總線“新貴”車載以太網(wǎng)(Ethernet)。
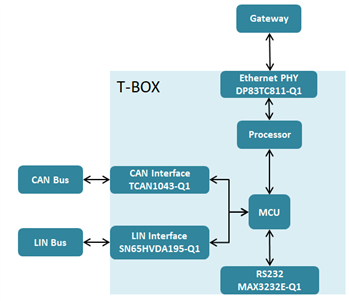
圖-1
這些接口的用途總結(jié)如下表-1所示:
| 接口類型 | 用途 |
| CAN收發(fā)器 | 高速CAN主要用在對實時性要求高的動力系統(tǒng)的控制;低速CAN主要是用在對實時性要求較低的舒適系統(tǒng)和車身系統(tǒng)的控制。 |
| LIN收發(fā)器 | 用在對速度以及安全性能要求不高的場合,如車身電子配件(車窗升降等)。 |
| 以太網(wǎng)收發(fā)器 | 目前主要應(yīng)用于非CAN的部分,與網(wǎng)關(guān)互連。主要解決高速數(shù)據(jù)傳輸、協(xié)議兼容和成本受限的問題。 |
| RS232/RS485/USB2.0 收發(fā)器 | 用于系統(tǒng)的調(diào)試與測試。 |
表-1
下面分別介紹這四種不同的總線,并推薦相應(yīng)的接口芯片。
1) CAN
該總線于上世紀(jì)80年代由德國博世公司提出,至今已經(jīng)成為了汽車中不可或缺的重要組成部分。為滿足車載系統(tǒng)的不同要求,CAN總線又分成高速CAN和低速CAN。
高速CAN主要用在對實時性要求高的動力系統(tǒng)的控制,如發(fā)動機、自動變速箱、組合儀表等。傳輸速率在125kbit/s - 1Mbit/s之間。
低速CAN主要是用在對實時性要求較低的舒適系統(tǒng)和車身系統(tǒng)的控制,如空調(diào)控制、座椅調(diào)節(jié)、車窗升降等。傳輸速率在5kbit/s - 125kbit/s之間。
如下圖-2所示,高速CAN與低速CAN之間通過網(wǎng)關(guān)互連,該網(wǎng)關(guān)可由CAN總線上的一個節(jié)點代替。
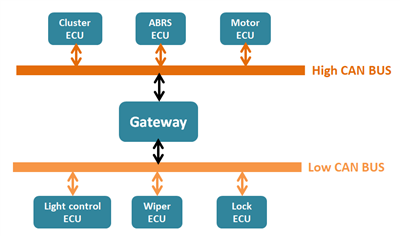
圖-2(注:ECU為Electronic Control Unit,電子控制單元)
采用CAN傳輸?shù)膬?yōu)點有很多,比如:實時性強,傳輸距離較遠(yuǎn),抗電磁干擾能力強,成本較低;采用雙線串行通信方式,檢錯能力強,可在高噪聲干擾環(huán)境中工作;可靠的錯誤處理和檢錯機制;具有優(yōu)先權(quán)和仲裁功能等。
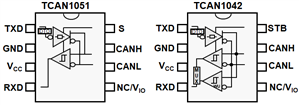
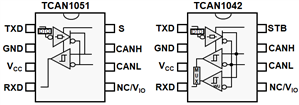
TI的主推的CAN總線接口芯片為TCAN1042-Q1 ,TCAN1051-Q1以及TCAN1043-Q1,下表-2列出了這三者的區(qū)別。
| 型號 | 芯片內(nèi)部簡圖 | 區(qū)別 |
| TCAN1042-Q1 |
 |
支持帶有總線喚醒功能的低功耗待機模式(standby)。待機模式電流為uA 級別。 |
| TCAN1051-Q1 |
 |
與TCAN1042不同,TCAN1051采用的是靜音模式(silent)而不是待機模式(standby)。靜音模式通常也稱為“只聽(listen only)”或者“只接收( receive only)”模式。從外部引腳看,STB改成了S。靜音模式電流模式為mA級別。 |
| TCAN1043-Q1 |
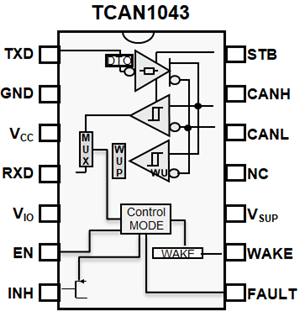 |
帶有喚醒和故障檢測功能。喚醒功能:除了CANH/CANL上的活動之外,WAKE引腳還允許TCAN從本地事件中被喚醒。故障檢測功能:包括多種保護和診斷功能,如線路短路檢測和電池連接檢測。 |
表-2
相比于同類產(chǎn)品,TI的優(yōu)勢如下:
符合國際領(lǐng)先的電磁兼容(EMC)標(biāo)準(zhǔn);
可去除共模扼流圈,從而減少汽車設(shè)計過程中的材料成本和空間;
強大的總線故障和靜電放電(ESD)保護功能:高達(dá)70V的總線故障保護,完全滿足汽車電池的要求,可以防止CAN總線引腳出現(xiàn)短路直流電壓引起故障;高達(dá)±15kV的 ESD保護,且無需外部瞬態(tài)電壓抑制(TVS)二極管,節(jié)省了電路板空間和成本;
帶寬增加:高達(dá)5 Mbps的速度,提高了CAN網(wǎng)絡(luò)上電子控制單元(ECU)和節(jié)點之間的通信速度和數(shù)據(jù)傳輸能力;
業(yè)界最短的環(huán)路延遲:僅為175 ns。
2) LIN
“不是有CAN了嗎?為何還需要LIN?”原因很簡單,CAN總線太貴啦!如果處處都用CAN的話,整車的總線架構(gòu)成本會很高。在一些不需要高速傳輸?shù)膱龊希畿嚿黼娮优浼ㄜ嚧啊④囨i等),LIN完全可以滿足需求。
LIN網(wǎng)絡(luò)在汽車中一般不獨立存在,通常會與上層CAN網(wǎng)絡(luò)相連,形成CAN-LIN網(wǎng)關(guān)節(jié)點,CAN-LIN網(wǎng)關(guān)也可由CAN總線下的一個節(jié)點代替。如下圖-3所示。
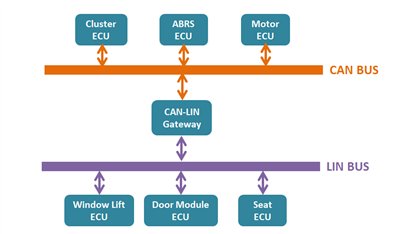
圖-3
LIN總線主要是面向汽車低端分布式應(yīng)用的低成本,低速串行通信總線。它的目標(biāo)是為現(xiàn)有汽車網(wǎng)絡(luò)提供輔助功能,在不需要高帶寬和多功能的場合下使用,以降低成本。
TI的主推LIN總線接口為SN65HVDA195-Q1,速度可達(dá)20-kbps。
3) 車載以太網(wǎng)
新的汽車功能(如自動泊車系統(tǒng),高級娛樂系統(tǒng)等)對新的數(shù)據(jù)總線傳輸提出了更高的要求。顯然,未來需要更加開放、高速、易于集成、線路部署成本低的車載網(wǎng)絡(luò)。這大大推動了以太網(wǎng)進入車載網(wǎng)絡(luò)的進程。
目前而言,車載以太網(wǎng)主要應(yīng)用于非CAN的部分,主要是解決高速數(shù)據(jù)傳輸、協(xié)議兼容和成本受限的問題,并非用于取代CAN總線。CAN與車載以太網(wǎng)之間通過網(wǎng)關(guān)互連,如下圖-4所示。未來以太網(wǎng)有可能替代車內(nèi)所有連接,引發(fā)新的車載總線革命。
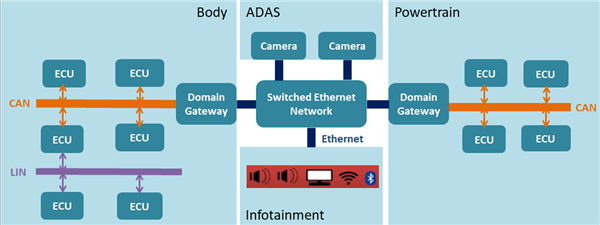
圖-4
與同類產(chǎn)品相比,TI于2018年5月推出的以太PHY接口DP83TC811S-Q1,優(yōu)勢非常突出:
支持多個MAC接口:SGMII / RGMII / RMII / MII;
更低的延時:小于150ns,僅為同類產(chǎn)品的一半,從而使汽車在ADAS等系統(tǒng)能快速響應(yīng);
低功耗:210mW;
與未來的1000M PHY引腳完全兼容;
集成度更高,可減少外部元器件(如電源去耦電容),節(jié)省一半以上的PCB布局空間,EMI性能優(yōu)越。
審核編輯:郭婷
-
控制器
+關(guān)注
關(guān)注
112文章
16332瀏覽量
177812 -
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5419瀏覽量
171603 -
汽車電子
+關(guān)注
關(guān)注
3026文章
7941瀏覽量
166912 -
局域網(wǎng)
+關(guān)注
關(guān)注
5文章
751瀏覽量
46277
發(fā)布評論請先 登錄
相關(guān)推薦
T-BOX系統(tǒng)解決方案深度剖析之電源軌
T-box系統(tǒng)解決方案之緊急呼叫單元深度剖析
T BOX系統(tǒng)解決方案深度剖析!
T-box系統(tǒng)解決方案深度剖析之緊急呼叫單元
T-BOX系統(tǒng)解決方案深度剖析之接口
T-BOX系統(tǒng)解決方案深度剖析之充放電管理
T-BOX系統(tǒng)解決方案深度剖析之電源軌
基于NEOWAY技術(shù)的T-Box解決方案


汽車T-Box方案概述
車聯(lián)網(wǎng)車載T-BOX系統(tǒng)解決方案_汽車TBOX 嵌入式arm應(yīng)用-飛凌嵌入式

車載T-Box邏輯功能測試方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論