 能量采集電路的工作原理
能量采集電路的工作原理
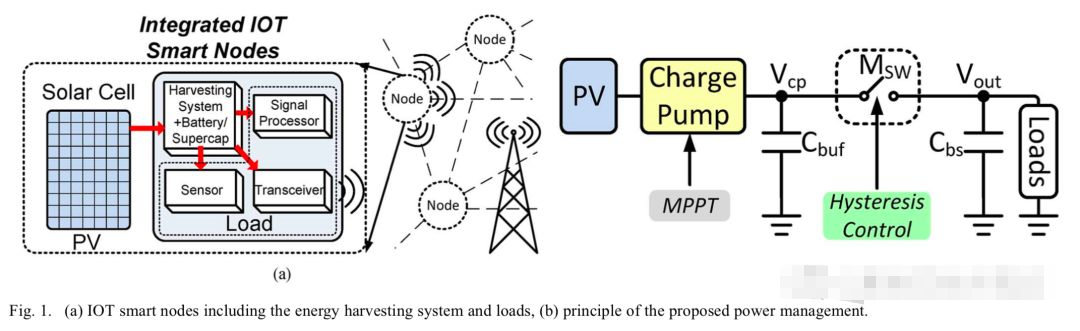
Fig.1(a)是智慧物聯網節點框架原理圖,節點主要包括能量采集系統、信號處理器、傳感器、收發機模塊,其中能量采集系統用于把環境中多種可用能量源,如太陽能、熱能、射頻信號能量、微生物分解化學能、振動能量通過fig1(b)模塊的電源管理模塊進行收集存儲、對智慧傳感器節點進行供電,使其可以正常的工作。隨著物聯網時代的到來,未來將會有數以億計的傳感器節點分布在我們的生活中用于環境監測、健康、工業、交通、智能家居、智慧城市等各個領域為我們提供更加安全、舒適、便捷、高效的生活環境。傳統的傳感器節點主要存在三大缺點:一需要電池供電,即使采用低功耗技術用于延長節點的壽命,但也會存在長期工作帶來電池損耗,導致節點工作壽命的縮短,無法長期重復利用,帶來較大的傳感器節點部署成本;二過大的電池將會使節點增加了節點的尺寸不便于可穿戴領域的監測和使用。三傳統的能量采集電路采用帶有off-Ship 電感的Boost電路用于升壓,提供給節點不同的電壓,即使采用片上可集成電感技術來實現節點的集成來說,過大的電感將會增加芯片的面積和制造成本。目前,采用片上電容DC-DC電源轉換管理技術使得能量采集技術,使得電源管理芯片具有可集成、低功耗、尺寸小等優點,已經成為未來物聯網節點的能量之源。
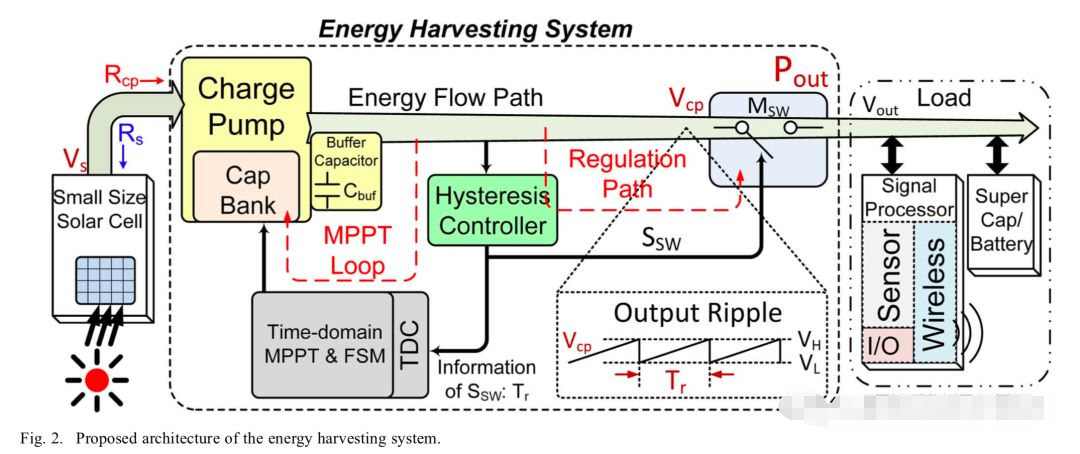
文中提出的能量采集系統架構原理圖如Fig.2所示。圖中通過solar cell采集太陽能作為系統能量輸入,對于太陽能單元模塊的建模可以看出其內阻RS隨著光照強度變化不斷變化,為了獲得最大能量采集,基本原理還是將能量采集系統的等效輸入電阻Rcp可以實現與RS匹配來得到最大輸出功率采集。能量采集系統主要包括電流饑餓型振蕩器、輔助振蕩器、x3可變泵電容的電荷泵、滯后調節器、時域MPPT的有限狀態機(包括時間轉數字轉換器)、用于存儲暫時能量采集的緩沖電容。整個系統工作流程如下:啟始時,電流饑餓型振蕩器為輔助振蕩器、輔助振蕩器、x3可變泵電容的電荷泵提供時鐘信號進行升壓,使系統進入正常穩定工作狀態,啟動過程階段滯后控制器的調節通過和MPPT環路均不工作。當輸入電壓達到3.3V以后開始進入正常工作模式,兩個穩定環路開始工作。滯后比較器由兩個開關閾值VH和VL,當Vcp電壓高于閾值VH電壓時,慢速滯后控制比較器輸出信號開關Msw打開,使存儲在緩沖電容中的能量提供個負載。能量快速下降,當Vcp電壓低于閾值VL電壓時,此時采用滯后控制器中高速比較器準確輸出控制信號斷開開關Msw,將采集能量源的能量暫時儲存在緩沖電容中,重復以上過程。在系統工作過程中,最大功率點追蹤在Vcp電壓低于閾值VL電壓時比較器準確輸出信號斷開開關Msw之后Vcp電壓充電上升至VH之前。系統時鐘CLK由電流饑餓型振蕩器產生,與此同時主電荷泵時鐘CLK1,2進行2倍頻生成CLKSEN信號提供給FSM進行計數,其中當滯后調節器輸出SSW作為有限狀態機的驅動時鐘,有限狀態機對CLKSEN進行計數,當充電到VH的充電時間Tr越長時,計數器時鐘越大,便實現了時間到數字的轉換。當充電時間計數越多時,說明充電時間Tr越慢,輸出功率越小。反之,當充電時間計數越少時,說明充電時間Tr越快,輸出功率越大。(有公式推導證明)通過時間計數的多少完成了功率大小的比較。基本上所有電荷泵都可以使用變壓器模型進行建模如圖
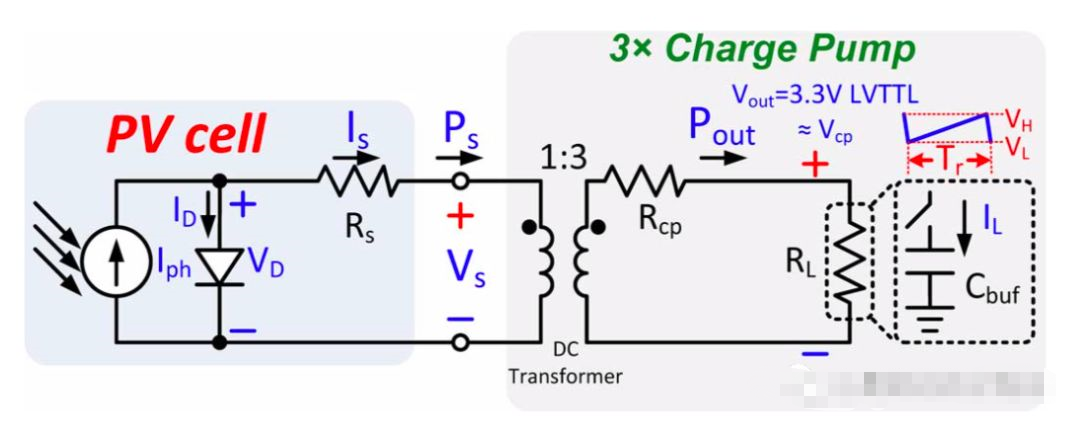
圖三電荷泵與PV cell 等效模型
三,我們得出電荷泵的等效SSL輸入電阻與電荷泵的時鐘頻率和泵電容大小的乘積成反比,因此為了實現電阻匹配達到最大功率傳輸,通過修改頻率和電荷泵電容參數之一便可以達到修改輸入電阻,實現阻抗的匹配。文中為了降低功耗,不采用改變時鐘頻率的方式,而采用電容陣列修改泵電容大小來完成輸入阻抗的改變。MPPT工作開始時,電荷泵電容陣列為最大,如電容數目為N,也就是此時輸入電阻Rcp的數值最小時,通過對緩沖電容充電至放電前記錄充電時間計數器數值T1,緩沖電容放電,并復位計數器模塊,開始新一輪充放電過程。接著電荷泵電容陣列數目減小,電容數目為N-1,輸入電阻Rcp的數值增大,通過對緩沖電容充電至放電前記錄充電時間計數器數值T2,比較兩個計數器大小決定是否減少電容數目,繼續MPPT過程,直至Tr充電時間最短時,即計數器數目最小時,此時功率最大,完成MPPT過程,并鎖定此狀態。大概過程就是,改變泵電容大小,實現電荷泵輸入電阻的改變,尋找最佳匹配電阻值,通過功率大小體現電阻的匹配程度。功率越大說明匹配性越好,反之電阻匹配性差。那么問題來了,功率大小如何比較呢?文中便采用計數時間的長短與功率大小的關系,通過計數器記錄充電時間的長短,完成輸出功率大小比較,最終找到最大的輸出功率。文中采用共用滯后控制器在FSM和調節路徑,降低了靜態功耗,另外對于X3電荷泵通過采用新結構,增大柵源電壓和2組非重疊時鐘降低了開關的導通電阻和傳導損耗以及反應電荷傳輸。除此之外,文中的MPPT過程是一個單邊的尋跡過程,將不會出現雙邊MPPT尋找過程中出現振蕩現象,造成最大功率點追蹤的失敗。所有模塊盡量減少使用模擬電路單元,更多使用數字單元代替,為了降低靜態功耗,提高功率的轉換效率。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753076 -
物聯網
+關注
關注
2909文章
44557瀏覽量
372776 -
電荷泵
+關注
關注
3文章
238瀏覽量
29581 -
能量
+關注
關注
0文章
104瀏覽量
16485 -
采集電路
+關注
關注
3文章
28瀏覽量
12265
發布評論請先 登錄
相關推薦
能量采集功率轉換的新進展
LLC諧振變換電路的工作原理是什么

振弦采集儀的工作原理及應用范圍

RTU數據采集終端的工作原理

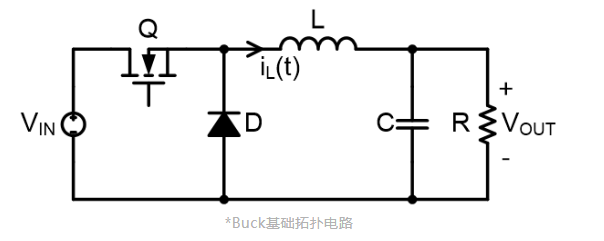
buck電路工作原理和應用介紹





 工商網監
工商網監
評論