 突破移動機器人技術瓶頸,解決動態地圖實時更新難題
突破移動機器人技術瓶頸,解決動態地圖實時更新難題
重中之重 為什么動態定位建圖技術這么關鍵?
工信部發布的《“十四五”機器人產業發展規劃》,提到重點研制AGV、無人叉車、分揀、包裝等移動機器人,提高移動機器人的智能化水平,促進巡邏檢查、定位導航、消防救援等公共服務機器人的創新應用。
對于移動機器人來說,重中之重的智能化評判標準為定位導航——SLAM (simultaneous localization and mapping),即時定位與地圖構建,或并發建圖與定位。
現有的導航定位算法是基于預先建好的地圖進行定位,然而移動機器人的工作環境不是一成不變的,例如商場環境,隨著時間的推移,店鋪以及柜臺都會發生變化,并且會增加一些活動場景,都會大幅度改變現有的移動機器人工作環境,從而使得移動機器人無法正常穩定執行工作。


激流勇進 集萃智造突破移動機器人動態建圖關鍵技術
正是為了應對動態環境沒有成熟、穩定的解決方案這一現狀,集萃智造整合傳統SLAM技術與領先算法,提出了全新的動態建圖技術方案,能完成動態環境下的定位建圖能力,并完整地考慮、覆蓋了機器人導航應用需求及功能。
尤其在商業環境下,針對其動態環境的高頻變化,新技術能夠動態地對環境特征進行分析與特征提取,構建完善的動態實時分析機制,并較好提高識別準確率,完成任務的同時,可以更高效動態更新環境地圖。

能夠自主導航,高精度定位的集萃智造清潔機器人
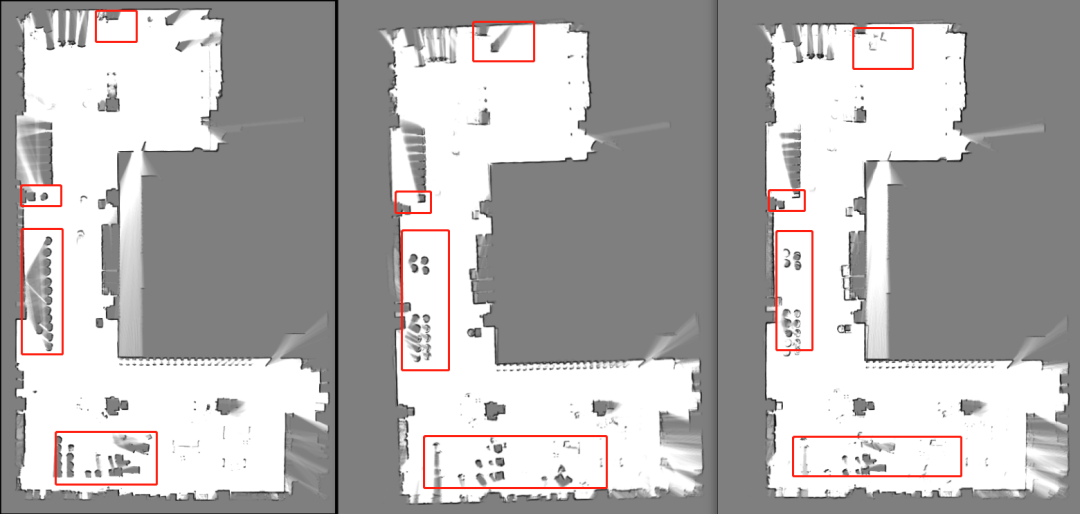
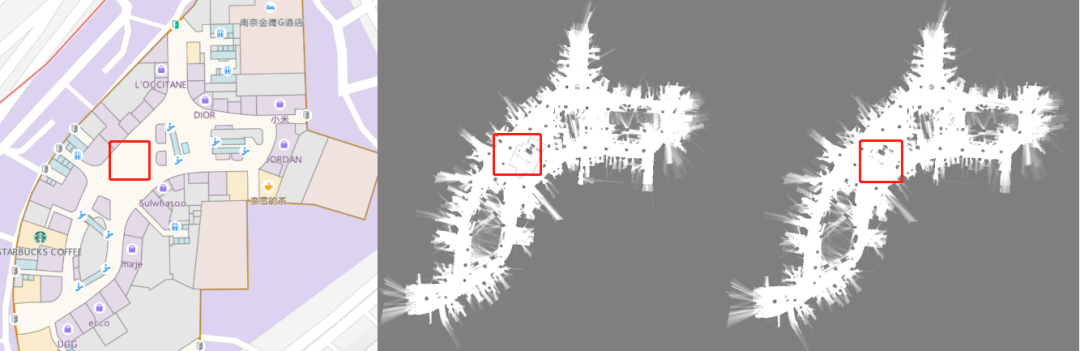
集萃智造動態建圖實時更新
該技術主要是基于機器人原始全局定位地圖,通過利用機器人運行時的激光雷達感知周圍環境中的障礙物,得到激光數據,形成實時子地圖;然后將實時子地圖與原始全局定位地圖對應的全局子地圖進行匹配,更新當前全局定位地圖。

獨具一格 集萃智造動態建圖關鍵技術的領先性
?領先的環境感知系統——多傳感器數據融合算法
集萃智造自主研發的移動機器人系列也是基于慣導傳感器(IMU),激編碼器(encoder),光雷達,視覺里程計等多種傳感器融合算法核心技術,能夠實現高精準定位,確保運行安全性。
導航采用全局路徑規劃與局部路徑規劃并行操作,實現安全可靠的運行。激光、視覺、超聲、防碰撞、防跌落、紅外等多傳感器數據的融合能力,能夠實現對動態環境的精準感知,在精確性、場景分析、避障、建圖面積以及成本方面提供完美方案。



?高精度動態建圖,構建細節精密化
基于強大的環境感知和建圖能力,集萃智造移動機器人可在大多數場景地點進行開機識別、全局定位,達到高精度的定位建圖。
? 高效建圖能力再進化,多種復雜場景通用
集萃智造移動機器人采用了多傳感器融合技術,能夠適應不同的環境,實現精準定位的同時,也可以選配搭載機器人電梯物聯模塊,能夠自動乘梯,實現跨樓層服務作業等,滿足了多樓層復雜環境的需求。

永無止境 集萃智造移動機器人多應用領域探索
與傳統的SLAM技術相比,集萃智造新技術實時性更高,能夠快速響應環境變化,并及時更新地圖。此外,該技術還采用了高效的算法,大大提高了地圖的精度和穩定性。
該技術的應用范圍廣泛,可用于室內巡邏、清潔消毒、家庭服務、機器人配送、陪伴/看護等領域,為機器人的智能化和自主化提供了更加可靠和高效的技術支持。


因為這些場景下機器人自主移動通常會存在環境復雜、粒度細、無法使用GPS等困難,而集萃智造動態地圖實時更新的關鍵技術可以有效地解決這些問題。
審核編輯 :李倩
-
移動機器人
+關注
關注
2文章
762瀏覽量
33567 -
SLAM
+關注
關注
23文章
423瀏覽量
31824
原文標題:集萃智造 | 突破移動機器人技術瓶頸,解決動態地圖實時更新難題
文章出處:【微信號:im_robotic,微信公眾號:機器人在線訂閱號】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

新松移動機器人批量進軍歐洲新能源市場
智能移動機器人

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
移動機器人四大賦能技術及NXP解決方案,本文總結全了!
海康機器人第100000臺移動機器人下線
機械臂和移動機器人兩種控制系統方案對比

自主移動機器人(AMR)功能和特點

富唯智能機器人集成了協作機器人、移動機器人和視覺引導技術
5個問題,洞悉自主移動機器人未來發展方向


科聰協作科聰協作(復合)移動機器人整體解決方案






 工商網監
工商網監
評論