 探索 Jetson Nano 為 myCobot 280 提供的強大功能
探索 Jetson Nano 為 myCobot 280 提供的強大功能
探索 Jetson Nano 為 myCobot 280 提供的強大功能,機器人技術的一個有前途的組合
介紹
近年來,科學技術的發展給我們的生活帶來了許多新的產品和服務,包括機器人在各個領域的集成。機器人已經成為我們生活中必不可少的一部分,從送貨機器人到智能家居語音助手。
在本文中,我們將討論myCobot 280 Jetson Nano,這是一種能夠進行科學實驗和教育方面的機械臂。
什么是Jetson Nano?
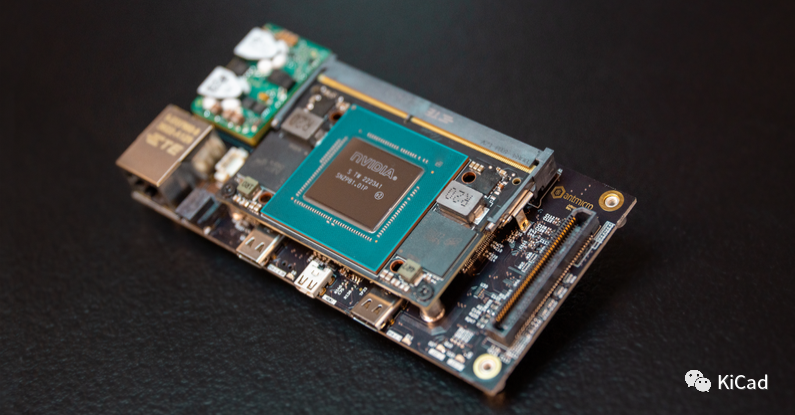
Jetson Nano 的尺寸僅為 70 x 45 毫米,比信用卡略小,是一種適用于機器學習應用的模塊系統 (SoM)。因為它只消耗大約 5 到 10 瓦的功率,所以它是邊緣應用中 AI 的絕佳工具。

Jetson Nano有一個基于Maxwell的GPU,其中包含128個CUDA內核,能夠每秒計算5 teraflops(.5 TFLOPs)。憑借其強大的ARM Cortex A57處理器和4GB LPDDR4 RAM,Nano是一款功能強大的小型計算機。它還支持多種外圍設備,包括千兆以太網、HDMI 2.0、DisplayPort 1.4、2 個 DSI 連接器、一個 M.2 PCIe 連接器、4 個 USB 3.0 端口和兩個 CSI 相機連接器(用于 Pi 相機等相機)。
它還具有一個40針GPIO連接器,其布局與Raspberry Pi相同,使制造商和開發人員能夠輕松重用以前項目中的某些模塊和電路。
隨著ChatGPT的出現,AI再次成為全球關注的焦點。從現在開始,值得從機械臂的角度了解人工智能趨勢。
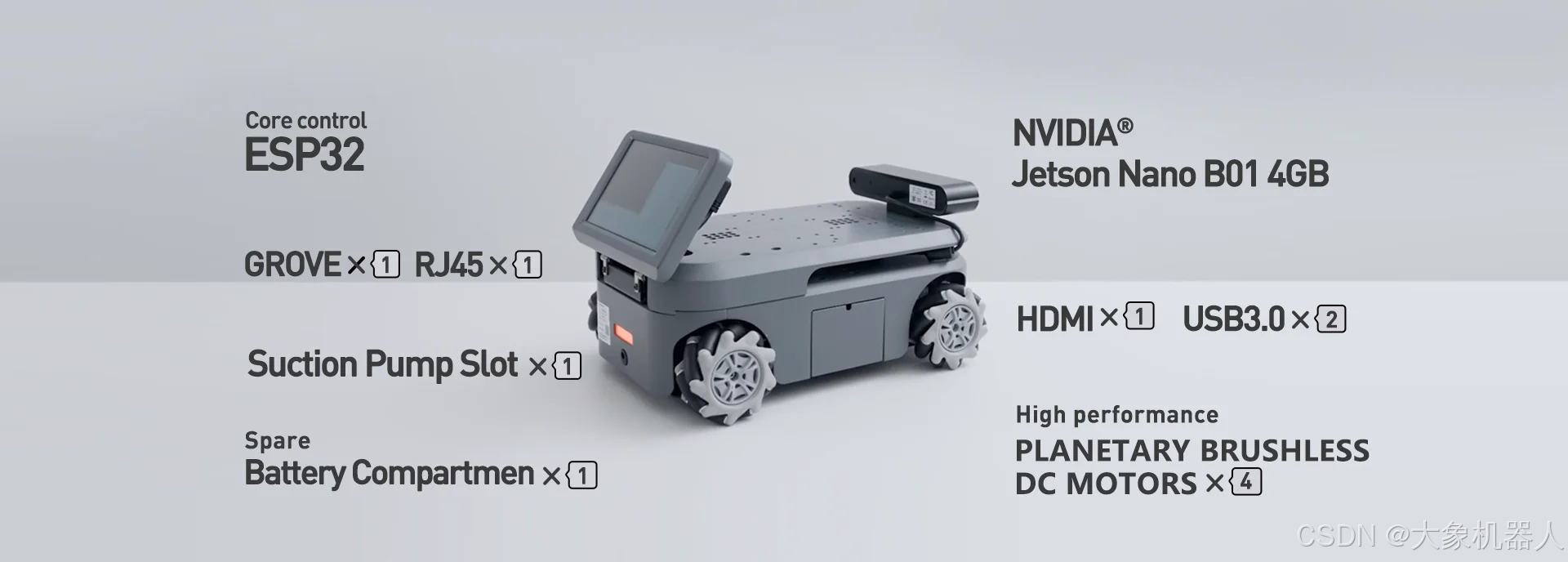
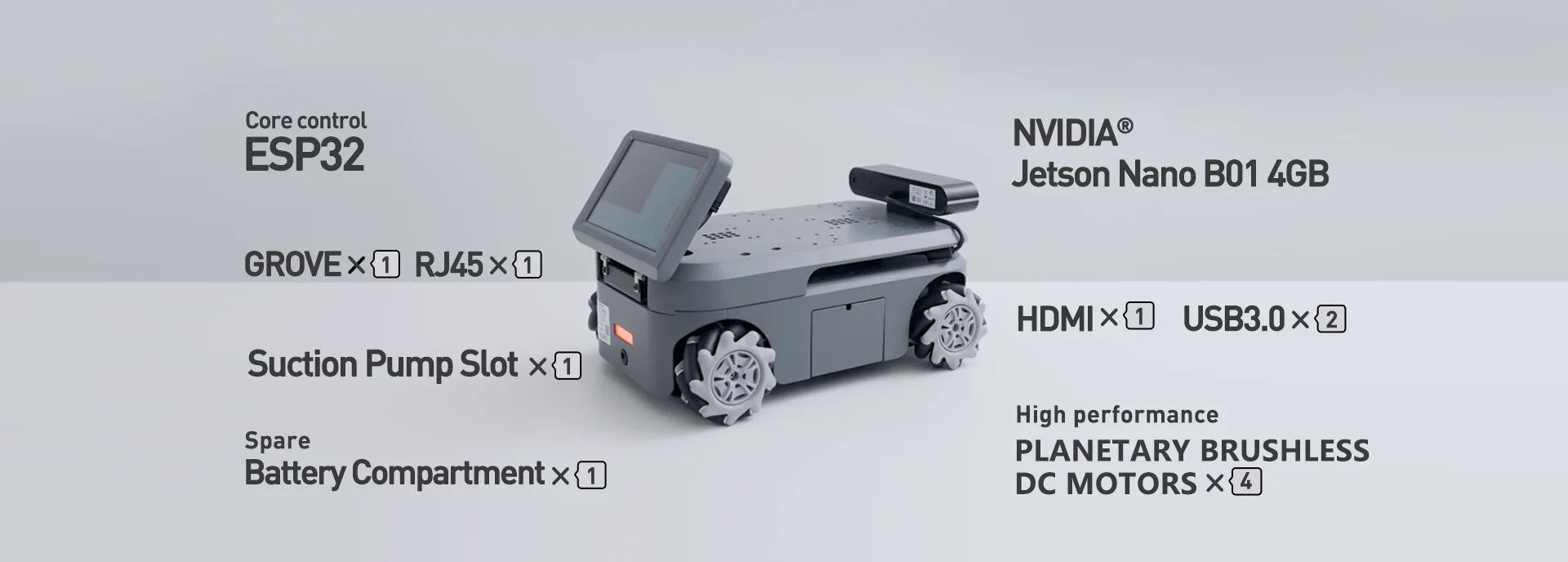
什么是myCobot 280 Jetson Nano?
myCobot 280 Jetson Nano是一種嵌入Jetson Nano的機械臂,Jetson Nano是一款小巧而強大的計算機,使手臂能夠輕松執行復雜的任務。手臂的有效載荷為 250 克,這意味著它可以攜帶高達 250 克的物體。手臂設計靈活且用途廣泛,具有六軸運動和高達 280 毫米的伸展范圍。它是廣泛應用的理想工具,包括教育、研究和 DIY 項目。
myCobot 280 Jetson Nano是一個開源的機械臂,這意味著源代碼和硬件設計可供公眾使用。這使用戶能夠修改和定制手臂以滿足他們的特定需求。該arm還與各種軟件和編程語言兼容,包括Python,ROS和myBlockly。
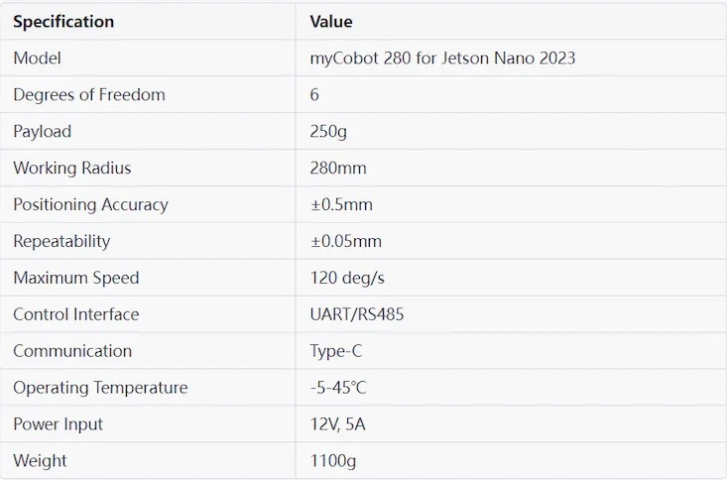
規范
讓我們看一下下表,看看它的具體規格是什么樣的。
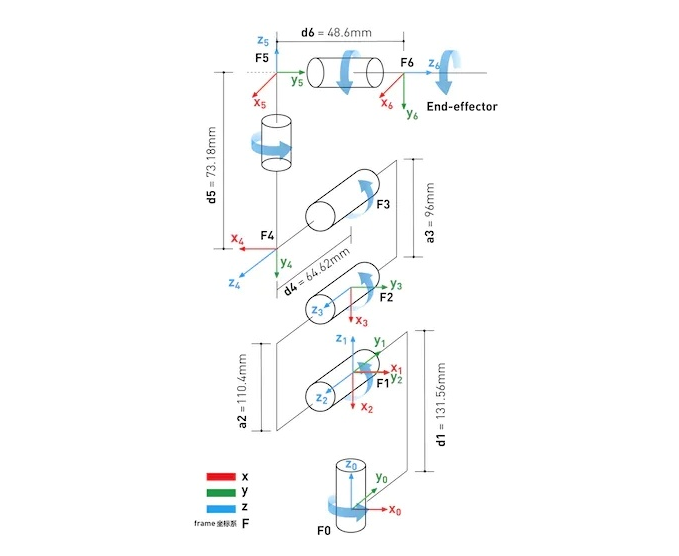
這是一個 DH 參數
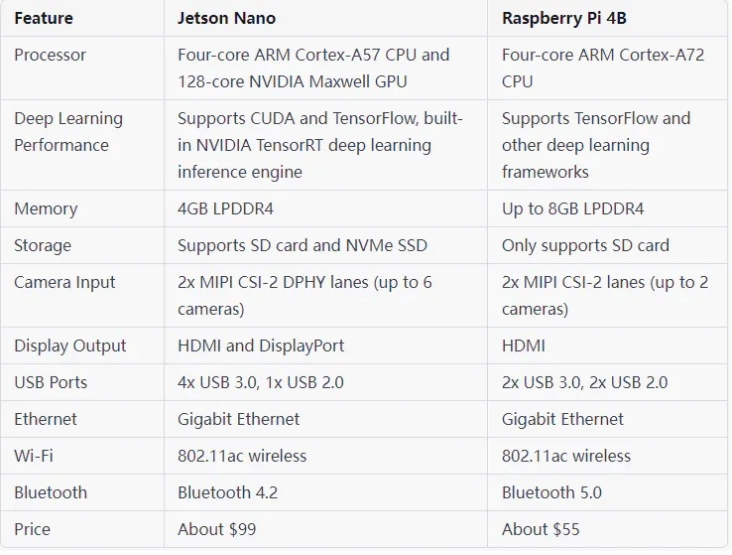
也許您對Jetson Nano和Raspberry Pi之間的區別感好奇。我們將簡要介紹使用 Jetson Nano 作為機器人嵌入式手臂的優勢。
在處理性能方面,Jetson Nano采用了四核ARM Cortex-A57 CPU和128核NVIDIA Maxwell GPU,比Raspberry Pi的四核ARM Cortex-A72 CPU更強大。ARM Cortex-A57 CPU采用64位架構,時鐘速度為1.43GHz,提供更高的計算性能。NVIDIA Maxwell GPU 專為深度學習等高性能計算任務而設計,具有高并行計算和大規模浮點計算能力。
在深度學習性能方面,Jetson Nano的GPU支持CUDA、TensorFlow等深度學習框架,可以加速深度學習模型的訓練和推理。此外,Jetson Nano 還嵌入了 NVIDIA TensorRT 深度學習推理引擎,進一步提升了深度學習模型的推理性能。雖然Raspberry Pi的性能也可以支持一些深度學習應用程序,但由于其處理器和GPU的限制,其性能相對較弱。
總體而言,如果一個項目需要高性能處理器,Jetson Nano將是最佳選擇,而Raspberry Pi基于其龐大的社區和世界上最大的開源硬件數據而擁有自己的優勢。
如何使用?
要開始使用myCobot280,我們只需要一臺顯示器、一個鍵盤和一個鼠標。我們可以使用一個名為pymycobot的Python庫來控制myCobot280的移動,該庫通過其開放的API提供了許多控制接口。有了這個庫,我們可以輕松地為機器人手臂開發應用程序。
我們利用pymycobot提供的API來控制myCobot280的動作,并編排舞蹈表演。
import serial from pymycobot import MyCobot import time mc = MyCobot('/dev/ttyTHS1',115200) mc.send_angles([0,0,0,0,0,0],80) time.sleep(1) for count in range(2): mc.send_angles([(-0.17),(-94.3),118.91,(-39.9),59.32,(-0.52)],80) time.sleep(1.2) mc.send_angles([67.85,(-3.42),(-116.98),106.52,23.11,(-0.52)],80) time.sleep(1.7) mc.send_angles([(-38.14),(-115.04),116.63,69.69,3.25,(-11.6)],80) time.sleep(1.7) mc.send_angles([2.72,(-26.19),140.27,(-110.74),(-6.15),(-11.25)],80) time.sleep(1) mc.send_angles([0,0,0,0,0,0],80)

我們還可以在機械臂的末端安裝一個攝像頭來探索機器視覺。
這是openCV開發的人臉識別功能的代碼。
def image_info(): # load cascade face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml') # input photo img = cv2.imread('maya.png') # turn to grays gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # check human face faces = face_cascade.detectMultiScale(img, 1.1, 4) for (x, y, w, h) in faces: cv2.rectangle(img, (x, y), (x+w, y+h), (255, 0, 0), 2) center_x = (x+w-x)//2+x center_y = (y+h-y)//2+y cv2.circle(img,(center_x,center_y),20,(0,255,255),2) # show plt.imshow(img) plt.show()
在Raspberry Pi 4B和Jetson Nano上運行此面部識別代碼顯示出明顯的速度差異,Jetson Nano返回結果的速度比Raspberry Pi快1-2秒。
讓我們先了解算力意味著什么。計算能力通常以每秒浮點運算數 (FLOPS) 來衡量。FLOPS是一秒鐘內可以完成的浮點運算數,用于評估計算機系統的性能。在深度學習領域,FLOPS通常用于衡量模型的計算復雜度和性能。例如,具有較高 FLOPS 值的模型意味著它需要更多的計算資源進行訓練和推理,但它也可能獲得更好的性能。
Jetson Nano 配備了 472 GFLOPS 的 GPU 計算能力,而根據官方數據,Raspberry Pi 4B 的浮點性能約為 3 GFLOPS。這可以解釋上述情況。
未來與展望
隨著人工智能技術的不斷發展,嵌入式機器人的應用前景越來越廣闊。未來,我們可以期待這種嵌入式六軸機械臂具有更廣泛的應用領域,涵蓋更多領域。例如,在工業、醫療、農業和教育領域,這種機械臂具有廣泛的應用前景。在工業領域,可用于生產線上的自動化生產,提高生產效率和質量;在醫療領域,可用于手術、康復等方面,幫助醫生更好地為患者服務;在農業部門,可用于農業生產的種植、收獲等各個環節,提高農業生產效率和質量;在教育領域,它可以用于機器人編程教育,幫助學生更好地學習編程和機器人技術。
除了應用領域的擴大,隨著技術的不斷進步,這種機械臂也將不斷發展。例如,未來可能會出現更先進的控制算法,使手臂的運動更加精確和靈活;更先進的傳感器技術可能會出現,使手臂能夠更準確地感知周圍環境;更先進的深度學習技術可能會出現,使手臂能夠智能地完成各種任務。總之,這種嵌入式六軸機械臂具有廣闊的應用前景和發展空間,我們可以期待它在未來繼續創新和進步。
審核編輯黃宇
-
機器人
+關注
關注
211文章
28390瀏覽量
206947 -
機械臂
+關注
關注
12文章
513瀏覽量
24557
發布評論請先 登錄
相關推薦
NVIDIA Jetson Orin Nano開發者套件的新功能
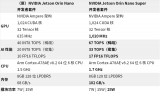
NVIDIA發布小巧高性價比的Jetson Orin Nano Super開發者套件
NVIDIA 推出高性價比的生成式 AI 超級計算機

Made with KiCad(二):Jetson Origin Baseboard
小巧設計,強大功能:探索SoC模塊的多樣化功能

盛顯科技RK3588核心板:為工業應用提供強大的計算能力

使用myAGV、Jetson Nano主板和3D攝像頭,實現了RTAB-Map的三維建圖功能!
探索SOLIDWORKS 2024設計增強功能
Jetson Nano集成探索大象機器人myAGV上的 SLAM 算法!
CD54HC280 CD74HC280 CD54HCT280 CD74HCT280數據表

Nvidia Jetson Nano + CYW55573/AWXB327MA-PUR M.2無法使用操作系統內置的網絡管理器管理Wi-Fi如何解決?
盤古PGX系列PGX-Nano開發板
myCobot Pro 630 煥新上市!全面助力六自由度協作機器人商用化進程推進!
NVIDIA Jetson為嵌入式計算領域探索AI可能

舒適打字體驗與強大功能合一:科大訊飛AI智能鍵盤D1的優勢解析






 工商網監
工商網監
評論