 線性諧振傳動器如何工作
線性諧振傳動器如何工作
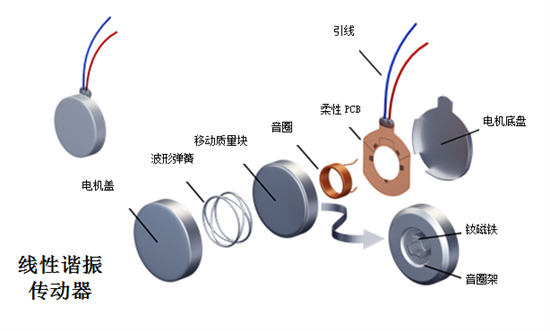
線性諧振傳動器(LRA)是在單個軸上產生振蕩力的振動電機。與直流偏心旋轉質量(ERM)電機不同,線性諧振傳動器依靠交流電壓來驅動壓靠與彈簧連接的移動質量塊的音圈。當音圈在彈簧的共振頻率下被驅動時,整個傳動器以可感知的力振動。雖然可以通過改變交流輸入來調節線性諧振傳動器的頻率和振幅,但是傳動器必須在其諧振頻率下被驅動,以產生大電流有意義的力。
在產生振動,壓靠移動質量塊時,音圈在裝置內部保持靜止。通過相對于彈簧向上和向下驅動磁體,LRA作為整體發生移位,產生振動。基礎機制類似于揚聲器產生聲音。在揚聲器中,通過將交流電頻率和振幅轉變為振動頻率和振幅使空氣通過錐體并且以不同的頻率發生位移。在內部,揚聲器通過以快速變化的交流電移動磁鐵質量塊來完成該任務。與可以以任意頻率驅動的揚聲器不同,LRA在特定頻率范圍內的觸覺應用才是有用的。
除了將由音圈產生的力直接傳遞到皮膚,該裝置還通過利用彈簧的共振頻率來優化功耗。如果音圈在彈簧的共振頻率下推動磁鐵質量塊抵靠彈簧,則裝置可以更有效地產生更高振幅的振動。由于音圈由交流電驅動,對振動的期望頻率和振幅進行建模,可以獨立地修改頻率和振幅。這不同于ERM電機,ERM電機與所產生振動的兩個性質耦合。
盡管頻率可以改變,但是LRA通常將在窄頻率范圍內操作以優化其功耗——如果裝置在彈簧諧振頻率下被驅動,則產生相等幅度的振動將消耗更少的功率。無論如何,這種改進本身提供了優于ERM電機的獨特優勢:隨時間變化強度的精確波形可以在具有固定頻率的LRA中再現,而ERM電機中的變化強度的波形也將產生變化的振動頻率。
LRA的典型起動時間約為10ms,是ERM電機產生振動所需時間的一小部分。當電流施加到裝置內的音圈時,磁鐵質量塊立即移動,產生這種不可思議的速度。在ERM電機中,只有在電機達到運行速度之后才能產生振動——即使在過度驅動電機產生更快的加速度時,電機在達到期望的振動強度之前可能需要20-50ms。不幸的是,LRA的停止時間明顯長于ERM電機。由于運行期間內部彈簧中持續存儲動能,LRA可能需要300 ms的時間來停止振動。值得慶幸的是,主動制動機構也可以用于LRA,通過執行提供給傳動器的交流信號的180度相移,可以通過產生與振蕩彈簧相反的力非常快速地(在大約10ms內)停止振動。
許多現代手機使用LRA而不是其他類型的振動電機,以便以更小的功率產生更寬范圍的振動觸覺效應。像視頻游戲控制器等其他消費電子產品也利用線性諧振傳動器來為觸摸板提供觸覺反饋。
該分線板適用于使用LRA的設備的模擬原型。上述分線板可以很容易地與任何電子原型平臺進行集成。您還可以在線查找分線板的其他變體。
現成的芯片可以簡化一些應用的開發過程。TI的DRV2605和DRV2605等觸覺驅動器可驅動LRA以及ERM電機。當我們設計具有豐富觸覺反饋的可穿戴設備Moment時,我們使用DRV2605在四個線性諧振傳動器提供沉浸式觸覺效果
Moment轉動使用精確定時的觸覺效果來產生在皮膚上的運動感覺。這為創建信息的觸覺表達提供了獨特的機會——例如,內置的觸覺羅盤可以使用戶總是感覺到真正北方的位置。Moment還配備了一個計時器,將時間的流逝轉變為在用戶手腕上移動的感覺,提高他們對不同任務花費多少時間的意識。DRV2605使我們可以快速對器件進行原型設計,開發這些獨特的應用,而不必擔心驅動LRA的復雜性。
由于DRV2605簡化了以正確諧振頻率驅動LRA的過程,因此我們能夠更快地對硬件設計的其他部分進行迭代。此外,通過其I2C接口將 DRV2605實現為具有微控制器的電路非常簡單,而且占用空間小,除了驅動器芯片之外僅需要去耦電容器。為您的設計選擇LRA也可以幫助提高精度和壽命。
盡管線性諧振傳動器在定制設計中似乎很難實現,但是如TIDRV2605等觸覺驅動器芯片可以簡化過程,提高性能并降低總體功耗。
TI的驅動器旨在驅動觸覺傳動器,通過消除不必要的功能和軟件控制簡化設計過程。提高性能和簡化設計涉及到幾項功能。例如,自動閉環反饋改進了ERM和LRA的響應。自動校準檢測和配置每個傳動器的閉環反饋系數,并且自諧振檢測感測LRA的諧振頻率。
因為根據用戶的需要定制,LRA可以提供更好的整體觸覺體驗。LRA還在不斷發展,努力降低功耗和電路板占用面積,同時產生更敏銳、更強的觸覺效果。
由于我們更多地依賴電子用戶界面,我們需要觸覺反饋來幫助我們了解系統正在做什么。觸覺技術不僅使我們獲得更令人滿意的體驗,還有助于改善控制,擴展功能和增強系統用戶的安全性,同時幫助制造商區將其產品差異化。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7542瀏覽量
151316 -
驅動器
+關注
關注
52文章
8226瀏覽量
146253 -
電機
+關注
關注
142文章
9001瀏覽量
145340
發布評論請先 登錄
相關推薦
線性諧振傳動器如何工作?
發燒友周報:盤點一周最熱、最值得閱讀的新聞與技術文章(第四期)
什么是線性諧振傳動器?
線性諧振傳動器如何工作?

液壓傳動的工作原理_液壓傳動是什么定律
帶有針對線性諧振制動器(LRA)自動諧振跟蹤和針對離心旋轉質量制動器(ERM)優化驅動的觸控反饋驅動器

簡述液壓傳動的工作原理
LLC諧振全橋變換器在交流傳動電力機車充電機中的應用






 工商網監
工商網監
評論