 一文讀懂3D機器視覺及手眼標定
一文讀懂3D機器視覺及手眼標定
1、視覺硬件系統
基本硬件包括如下:
? 1 工控機
? 2 網線
? 3 路由器
? 4 標定板
? 5 標定板固定法蘭
? 6 相機與線纜
2、接線圖
分別將三根網線的一端連接到路由器的LAN 口(注意不要接到WAN 口),另一端分別連接至機器人網口、工控機網口、相機(相機線纜包括電源線和網線)網口,路由器端連接如下圖所示:

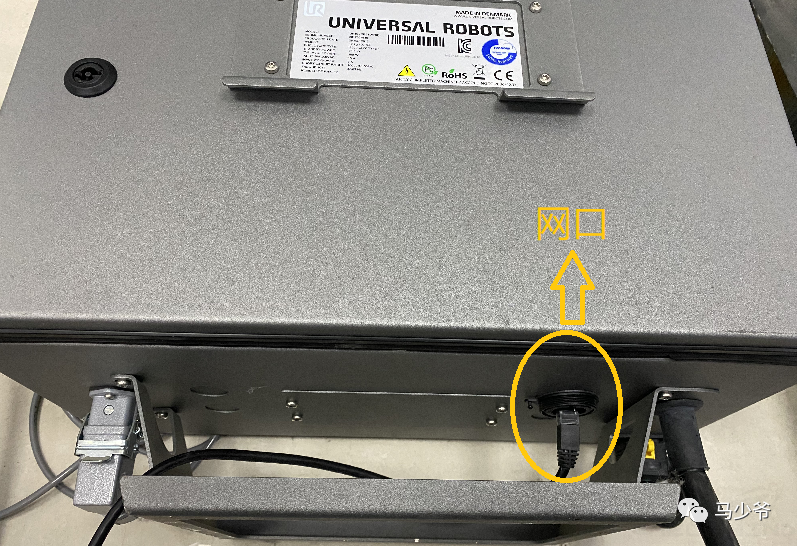
機器人網口為控制柜上的網口,如下圖所示(以UR 機器人為例):
3、軟件環境搭建
在確認電源、網線等連接正常后,開始設置IP,通過路由器將工控機、相機、機器人三者構建在同一網段。
在瀏覽器中輸入網址tplogin.cn 進入路由管理界面(在路由器背部可以查看登錄管理界面地址),如果是設置好的路由器直接輸入設置好的網段,即可進入路由管理界面,例如192.168.3.1(設置為3 網段)。
進入路由管理界面時會要求輸入用戶名以及用戶密碼,如下圖所示:

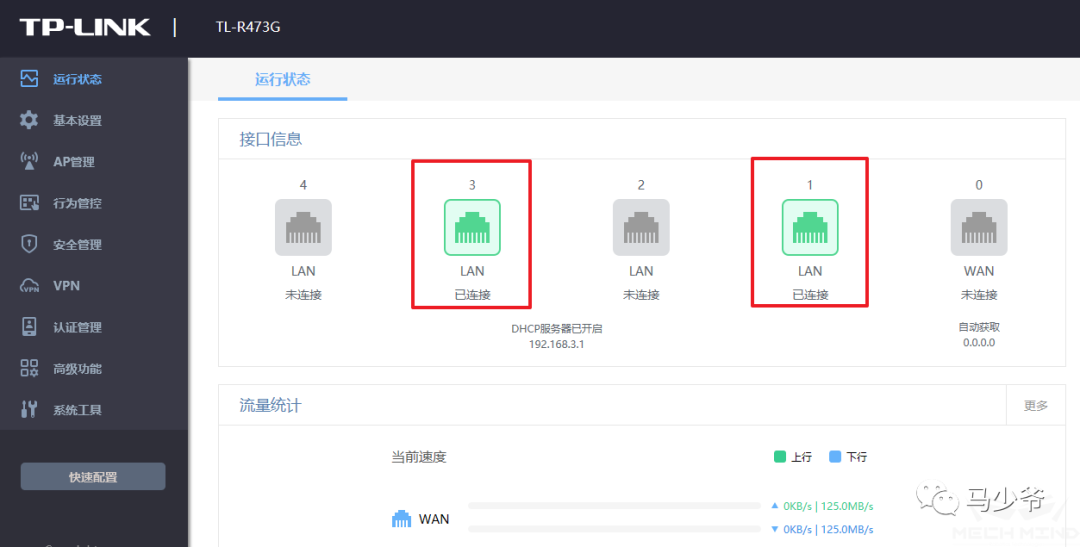
管理界面如下圖所示,其中紅色框中的綠色網口代表連接正常的網口。
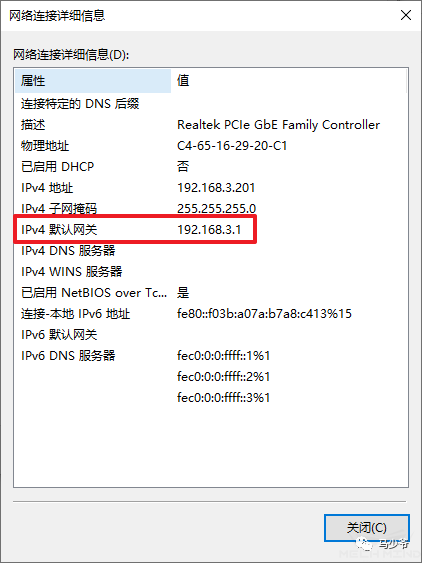
如果路由器已經設置好了,當忘記了設置的網段,無法進入路由管理界面,又不想把路由器恢復為出廠設置重新設置,可以通過如下圖所示的網絡連接詳細信息查看默認網關。
此時打開機器人示教器,查看機器人的IP,如下圖所示(以UR 機器人為例):
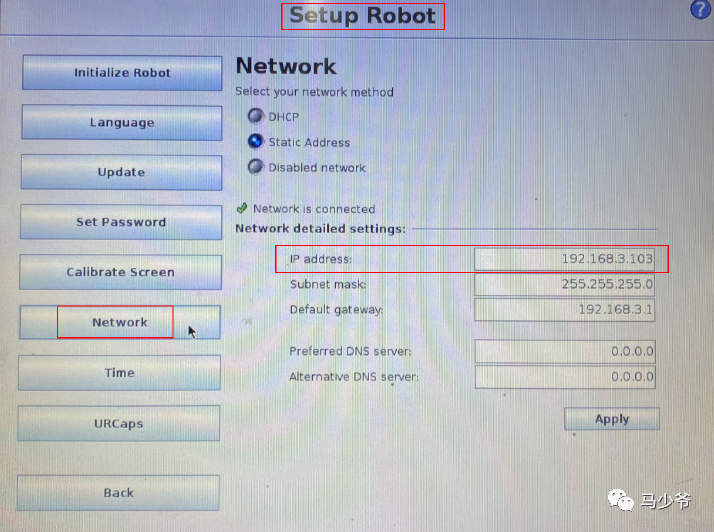
可以看到機器人的IP 在3 網段,那就通過路由器將相機、工控機、機器人統一設置在3 網段下(如果機器人的IP 可以修改,也可以把機器人的IP 改為其它網段下,靈活操作即可)
在路由器管理界面,打開左側工具欄的基本設置里面的LAN 設置,在手動模式下設置IP 地址,例如設置3 網段,輸入為192.168.3.1,子網掩碼默認為255.255.255.0,點擊設置,即可設置成功。如下圖所示:

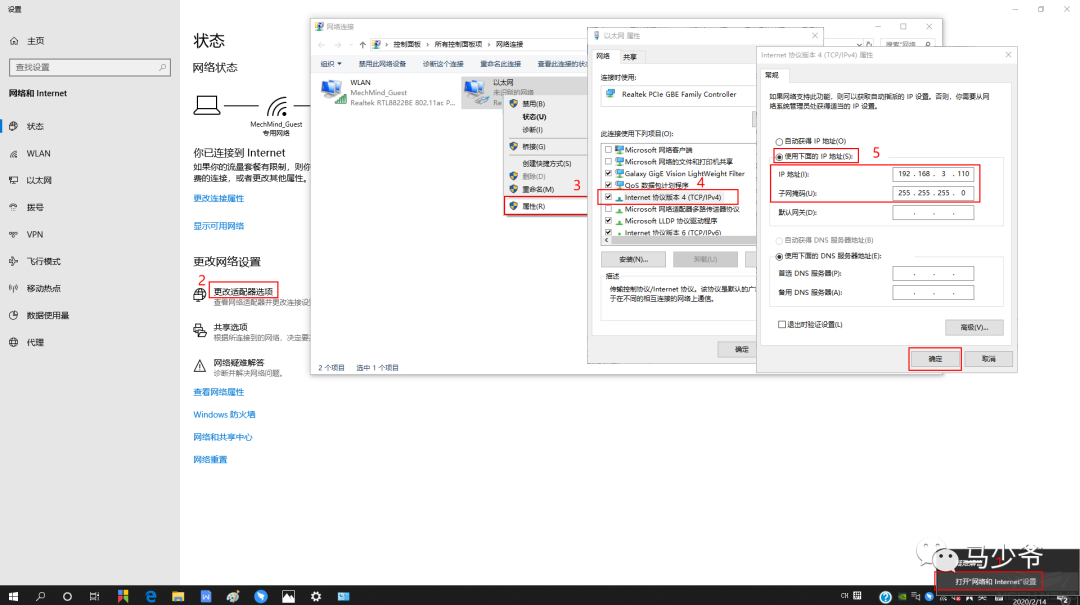
同樣要設置工控機的IP 地址在3 網段下,依次點擊如下圖所示,即可將工控機設置在3 網段下(其中192.168.3.110 中的110 為任意值,從0-255 之間取值,只要不是和機器人IP 重復的即可)。
4、機器人的手眼標定
要實現由圖像目標點到實際物體上抓取點之間的坐標轉換,就必須擁有準確的相機內外參信息。其中內參是相機內部的基本參數,包括鏡頭焦距、畸變等。一般相機出廠時內參已標定完成,保存在相機內部。
相機外參表示的是機器人與相機之間的位姿轉換關系(即手眼關系,因此相機外參的標定稱之為機器人手眼標定)。機器人與相機在不同的使用場景下其相對位姿不固定,需要在工作現場進行標定才能獲得相機與機器人之間的手眼關系。
由于機器人手眼標定會使用相機的內參,所以具有準確的內參是標定外參的前提。
機器人手眼標定的分類方式各不相同,根據相機相對于機器人的安裝方式,將手眼標定分為兩種:機器人手眼標定MATLAB及C++實現(二十九)
1. 相機獨立于機器人固定在支架上,稱為ETH(Eye to hand) 方式。
2. 相機固定于機器人末端法蘭上,稱為EIH(Eye in hand) 方式。
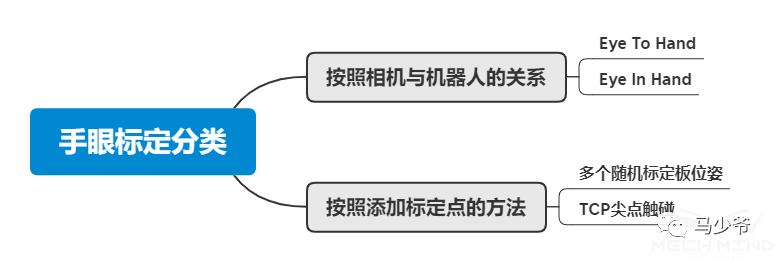
同時,可使用多個隨機標定板位姿或TCP 尖點觸碰的方法添加標定點。兩者的主要區別在于:
1. 多個隨機標定板位姿:使用軟件自動生成的軌跡點或手動添加的多個位姿,在每個位姿拍照并識別標定板角點,建立標定板、相機及機器人三者間的關系,其過程簡單,標定精度高。
2. TCP 尖點觸碰:利用三點法確定標定板位姿后,建立標定板、相機及機器人三者間的關系。適用于機器人活動空間局促、無法使用上位機來控制和標定板無法安裝等情況。
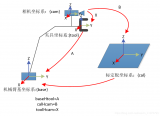
分類方式如下圖所示。
4.1 ETH 標定基本原理
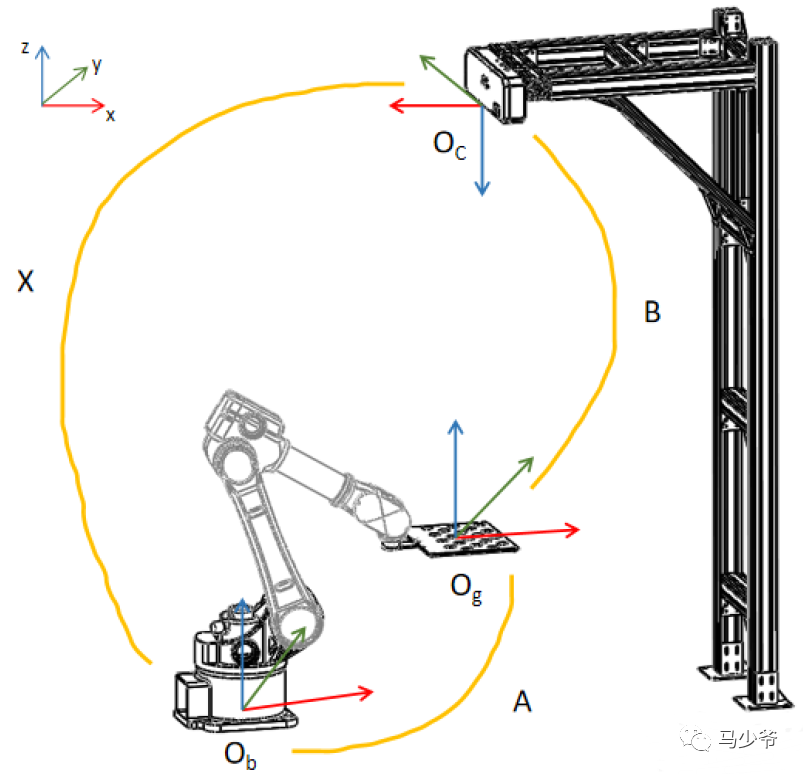
機器人末端通過法蘭連接已知尺寸的標定板,可以得到標定板(calibration grid)上的每個標志點相對于機器人基坐標Base 的坐標A;通過相機拍照獲得標定板上每個圓點的圖像,可以得到相機光心相對于標定板上每個標志點的坐標B;相機光心和機器人基坐標(Base)之間的位姿關系X 為待求量。A、B 和X構成閉環,形成等式,可以在等式中求解未知數X。通過移動機器人,變換標定板相對于相機的位姿,可以得到多組等式,對這些等式的值進行擬合優化計算,最終得到最優的X 的值。位姿關系如下圖所示。
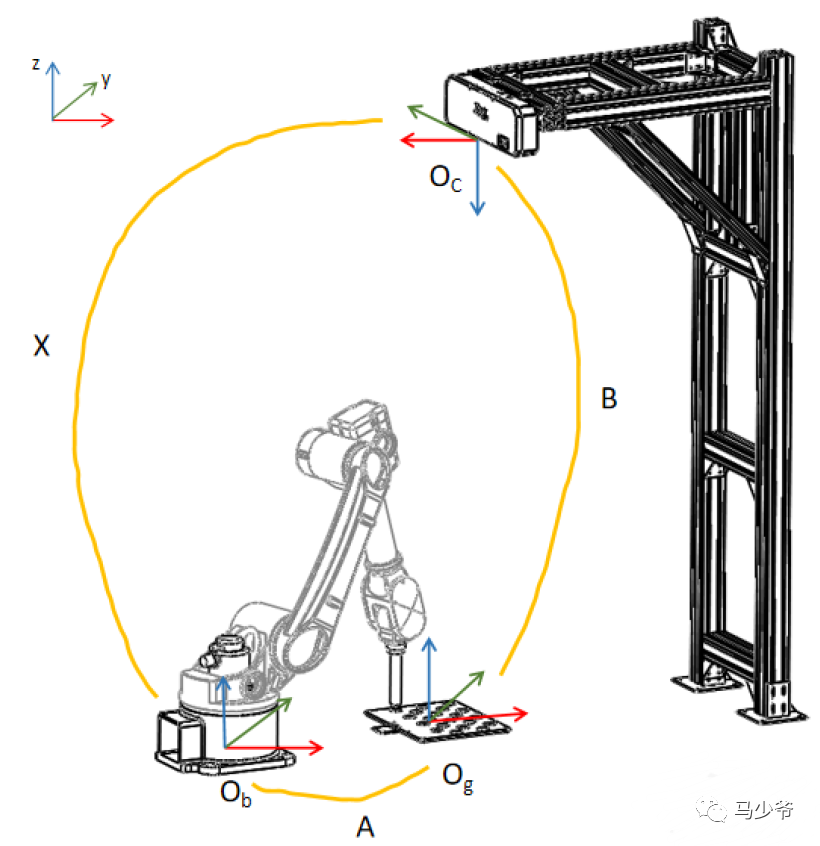
當使用TCP 觸碰法標定時,標定板放置在工作平面,機器人末端加裝已知TCP 的尖點,觸碰標定板圓點,其原理如下圖所示,其中A、B 已知,求解X 的值。
實際操作中,坐標A的獲取有以下三種方式:
1. 標定板到法蘭末端位置關系已知(三點法或是已知連接件尺寸計算得到),則A 可以直接計算得到;
2. 標定板到法蘭末端位置關系未知,則通過標定板在標定過程中的一系列相對移動,通過數值方法計算得到標定板到法蘭末端的位置關系,進而計算得到A;
3. 標定板與機器人末端不固定,則可以通過已知tcp 坐標的尖點對標定板標志點進行觸碰的方式計算得到A的數值。以上三種方式對應三種不同獲取標定數據的方式。
ETH 方式標定的是相機光心和機器人基坐標之間的位姿關系。如果機器人基坐標或者相機發生移動,對應的外參就會相應發生變化,此時需要重新標定手眼關系。
4.2 EIH 標定基本原理
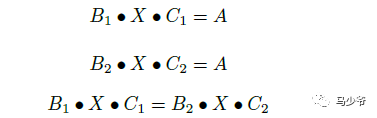
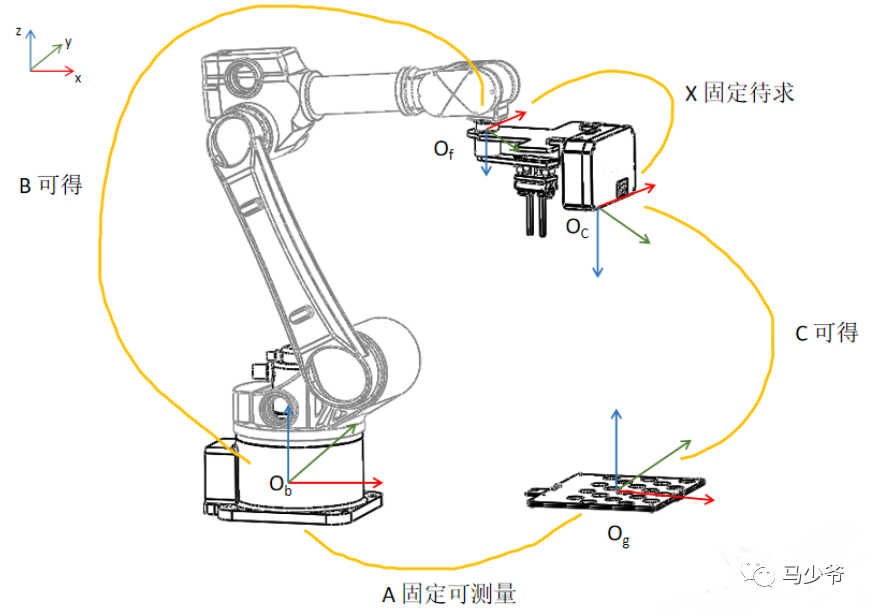
機器人末端通過固定架將相機固定,此時機器人末端法蘭中心與相機光心之間的位姿相對固定,即下圖中的未知變量X;機器人末端法蘭中心相對于機器人基坐標系(Base)的位姿為已知量B;相機通過對標定板(calibration grid)進行拍照,獲得相機光心和標定板上每個圓點之間的位姿關系,可得已知量C;標定板平放在相機視野可達區域,其相對于機器人基坐標之間的位姿關系為一固定值A;這樣變量A、B、C、X 構成閉環關系。下列等式中,由于A 為固定值,將前兩個等式合并,得到的新等式中只有X 為未知待求量。變換機器人末端位姿進行不同角度拍照,得到多組A、B、C 的值,利用這些數值進行擬合計算,得到最優的X 的值。
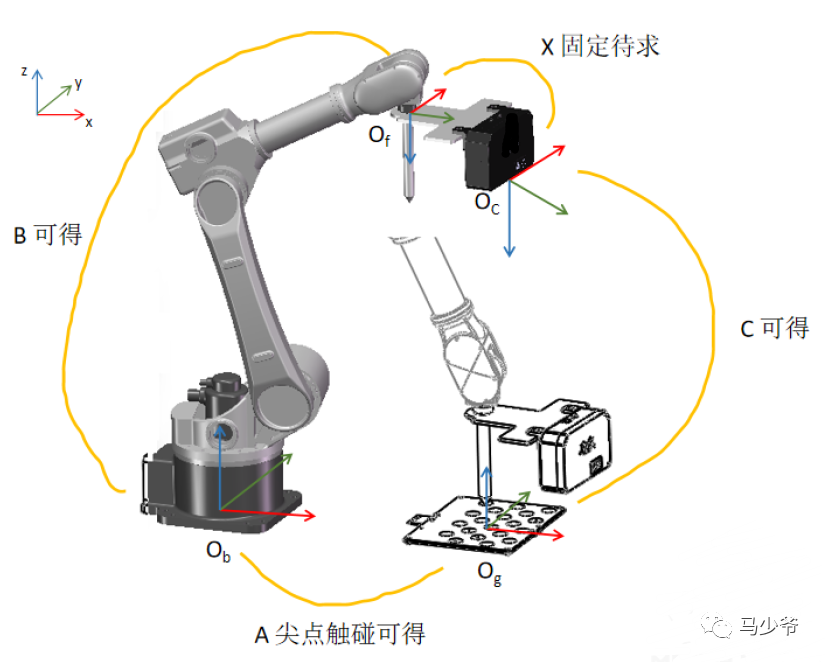
當使用TCP 觸碰法標定時,標定板放置在工作平面,機器人末端加裝已知尺寸的TCP 尖點,觸碰標定板圓點,其原理如下圖所示,其中A、B、C 已知,則X 的值也可求得。
EIH 標定的是相機光心和機器人末端法蘭中心之間的位姿關系。如果相機相對于機器人末端法蘭中心坐標發生移動,對應的外參就會相應發生變化,此時需要重新標定外參。
選取一個正常標定板(標定板上圓點清晰,沒有明顯刮花痕跡,標定板沒有明顯彎曲變形視為正常標定板)。
ETH 方式下將標定法蘭安裝到機器人六軸(如果是四軸機器人即安裝在四軸)上,再將標定板安裝在法蘭上,標定法蘭在機器人末端的安裝方向任意。確保標定板安裝穩固,標定板與機器人末端的XY 平面平行。
EIH 方式將標定板平放在工作平面的中心位置。其安裝和放置如下圖所示(左圖為ETH 方式,右圖為EIH 方式):
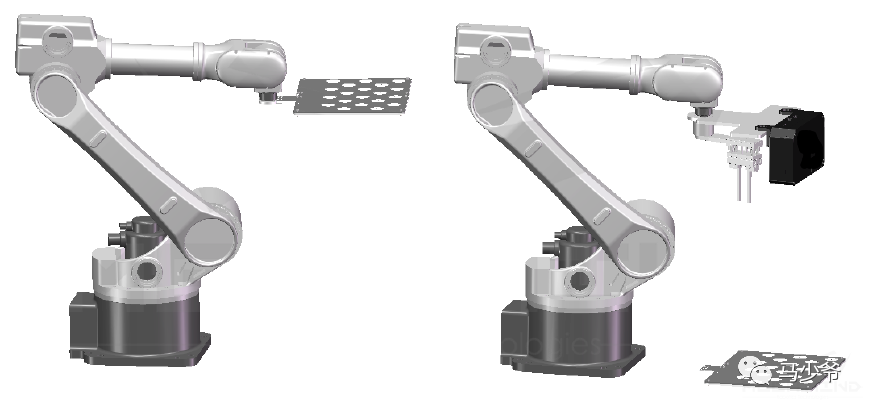
標定板安裝完畢后將機器人移動到起始標定位置。對于ETH 方式,機器人起始標定位置為視野最下方中間位置(機器人帶動標定板由下往上層層標定);EIH 方式起始位置為相機工作位置(機器人帶動相機由下往上層層標定)。如下圖所示,左側為ETH 方式,右側為EIH 方式。

使用TCP 觸碰法時ETH 和EIH 均將標定板放置在相機工作平面內。
審核編輯:湯梓紅
-
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
機器視覺
+關注
關注
161文章
4369瀏覽量
120282 -
路由器
+關注
關注
22文章
3728瀏覽量
113701 -
接線圖
+關注
關注
22文章
205瀏覽量
49802 -
網口
+關注
關注
0文章
102瀏覽量
7238
原文標題:3D機器視覺及手眼標定
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
3D掃描、機器視覺人才招募令——深圳
基于Dragonboard 410c平臺的機器3D視覺—攝像機標定原理
采用DLP技術的3D機器視覺參考設計包括BOM
請問各位高手,如何用labview的vision實現手眼標定
基于Dragonboard 410c平臺的機器3D視覺——如何標定攝像機并獲取參數
一文帶你看懂3D視覺
常見的機器人視覺伺服中的標定技術有哪些

助力風電行業!深視智能SR7400線激光以機器人手眼標定實現風力葉片切割引導






 工商網監
工商網監
評論