 更靈敏、更精準、更智能,機器人避障也能“隨心所欲”
更靈敏、更精準、更智能,機器人避障也能“隨心所欲”
對于穿梭在人群中的機器人們而言,避障的重要性不言而喻。
隨著機器人應用越來越廣泛,機器人的作業場景的復雜度在顯著增加,與人類的接觸也越加密集,這對機器人的避障功能提出了新要求,不僅要更加精準靈敏,還要能夠根據場景及障礙物屬性的不同,實現智能避障,如根據障礙物的屬性信息,進行不同距離的避障動作。
以應用在商超、餐廳等場景下的服務機器人為例,人員密集且流動性大、場景格局復雜是場景的主要特征,機器人作業時不僅要與人頻繁交互,還要在密集的流動人群中不斷進行動態避障或急停等安全規避動作。要高效完成這些基于環境變化、目標需求產生的實時性任務,現有的避障方案已然左支右絀。
從技術角度來看,目前機器人的避障方案主要是借助激光、TOF、結構光、雙目等傳感器采集場景內障礙物的點云信息,構建場景柵格地圖,然后對障礙物進行避障,此類方案雖然能夠滿足機器人的避障需求,但也僅僅“剛剛能用”,且傳感器也有著多方面缺點:傳感器成本高、視場角小(如TOF)、標定參數易受溫度等因素影響,長期穩定性不好(如結構光),此外,還缺少智能化交互能力,由于信息量豐富度不足,無法結合深度學習信息進行智能化升級,導致難以實現智能化避障及環境交互。
安全決策,賦予機器人精準避障能力
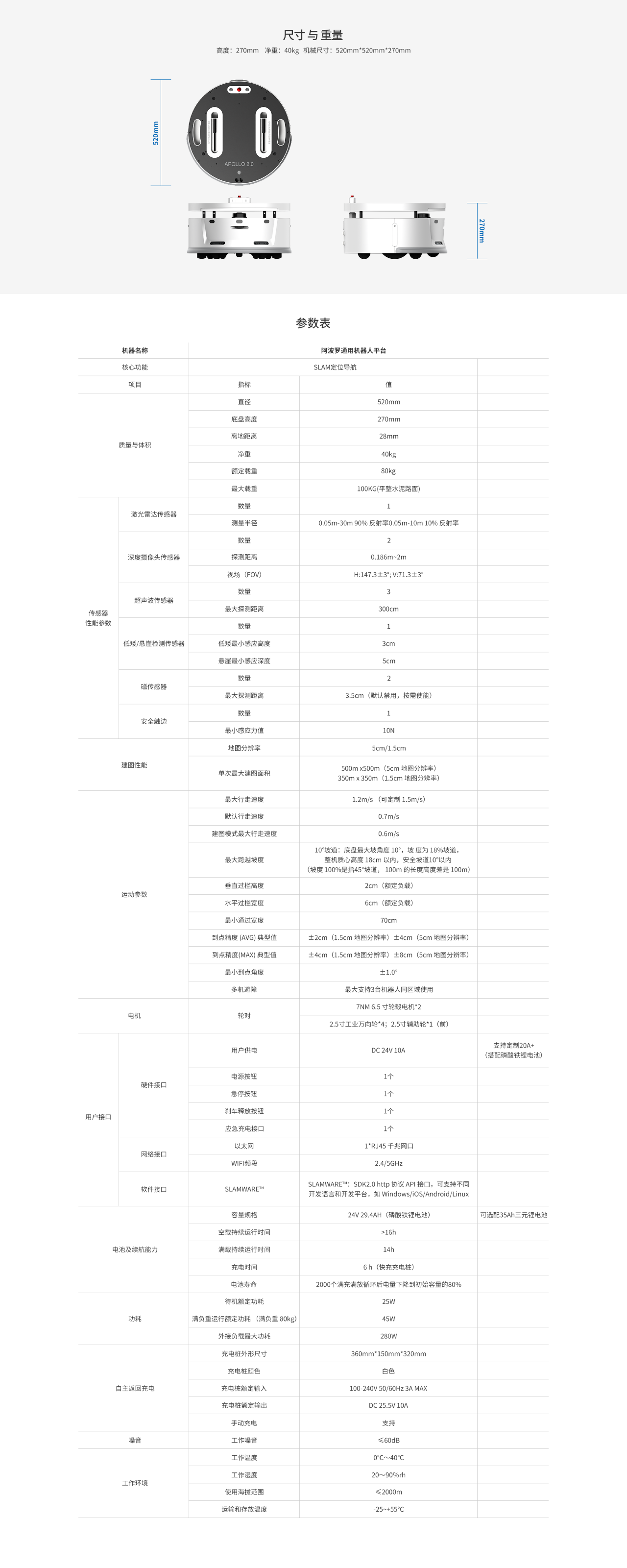
INDEMIND在開發商用機器人AI Kit的過程中,設計了一套系統化的安全決策體系,不僅實現了智能避障,還擁有主動安全功能。據了解,商用機器人AI Kit是專門面向10—100kg量級的商用機器人自主導航方案,滿足商用機器人導航定位、智能避障、路徑規劃、決策交互等核心功能的開發。
在作業過程中,基于INDEMIND微秒級的安全決策,機器人能夠穩定檢測各類障礙物,支持低矮障礙物避障(地插、桌椅底座等);高反障礙物避障(玻璃、鏡面等);全高障礙物避障(桌面、警戒線等),保障機器人在復雜環境下安全運行。
在實際場景中,動態事件頻發,機器人的“臨機判斷”能力至關重要。搭載INDEMIND商用機器人AI Kit的機器人除了能夠實時檢測拋物、行人、快速移動物體等突破情況外,也能夠實時進行潛在風險判斷(行人等),根據風險分類,提前做出規避策略,實現主動安全。商用場景中如商場里常見的高透類障礙物(玻璃護欄、玻璃墻等)、高危場景(自動扶梯、轉門等)以及超市中的狹窄通道、貨架等類似障礙物或場景,對于機器人往往有著極大挑戰,導致避障“失靈”的情況時有發生。而搭載INDEMIND商用機器人AI Kit的機器人可精準穩定地識別這類障礙物,并實施避障、急停等安全策略。
面對不同光線條件,機器人同樣能夠穩定避障。基于INDEMIND的強光規避策略和硬件上內置的亮度補光、紋理補光兩種紅外補光設備(均符合人眼安全等級C1等級要求),機器人滿足強光直射、無光源、昏暗等特殊光照環境下的無差異工作要求。
和障礙物“零接觸”的秘訣
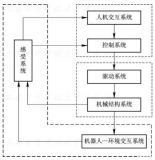
“隨心所欲”的背后,離不開技術創新。在技術實現上,INDEMIND通過從傳感器、識別算法、語義地圖、策略執行4個層面出發,建立了各單元聯動機制,充分釋放系統硬件潛力,為“隨心所欲”提供了底層支持。
多傳感器融合,提升信息獲取能力:傳感器采用雙目視覺模組、Lidar、TOF、跌落傳感器、碰撞傳感器;
AI識別算法,精準識別場景信息:基于TOF 3D數據,基于camera 2D環境圖像數據、基于Lidar 2D平面數據等的物體及場景識別及基于跌落、碰撞等傳感器的概率判別;
3D語義地圖,賦予“人眼”感官:基于識別得到的語義信息結合機器人位姿信息,構建環境語義地圖;
策略執行,模仿“人腦”決策:對構建的語義地圖疊加決策屬性信息,進行安全決策執行。
值得一提的是,基于視覺技術的獨有優勢,搭載INDEMIND商用機器人AI Kit的機器人,無需技術人員參與,能夠實時自主構建地圖,做到了新機器、新場景無需預部署,開箱即用,且變更場景后,機器人也能自主更新地圖,也無需技術人員參與,大大提升使用體驗。同時,還支持多層地圖及全局調度,擁有智能梯控系統,能夠實現多樓層靈活作業。
審核編輯黃宇
-
機器人
+關注
關注
211文章
28382瀏覽量
206919 -
AI
+關注
關注
87文章
30745瀏覽量
268896
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
艾邁斯歐司朗Belago紅外LED,助力Supernode打造避障掃地機器人

醫療機器人發展現狀與趨勢
基于RK3588的割草機器人應用解決方案

深圳北站智能化升級:巡檢機器人上崗,明治激光雷達“護航”避障

水下測距傳感器:泳池清潔機器人精準定位的必備智能感知“神器”

實現機器人自主感知避障,傳感的多樣選擇
視覺、激光、結構光?掃地機器人導航避障技術盤點
富唯智能機器人集成了協作機器人、移動機器人和視覺引導技術
星宸科技SSU9386機器人解決方案,感知更靈敏、運控更精細、交互更智能





 工商網監
工商網監
評論