") 嵌入式C語言中結構體封裝函數(shù)詳解
嵌入式C語言中結構體封裝函數(shù)詳解
說明:
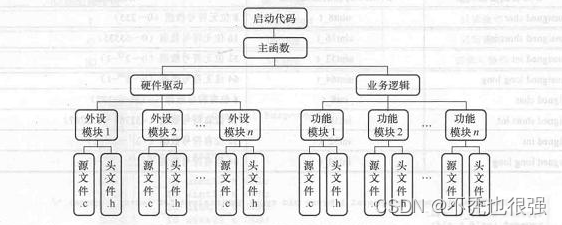
在嵌入式系統(tǒng)中,結構體封裝函數(shù)可以用于對于嵌入式硬件資源進行抽象和封裝,從而提高軟件的可維護性和可移植性。 結構體封裝函數(shù)通常包含數(shù)據(jù)和行為,并提供了對數(shù)據(jù)的訪問和操作方法。
比如可以將硬件驅動函數(shù)封裝在結構體中,方便對外提供統(tǒng)一的API接口,同時也便于代碼的移植和擴展。 另外,結構體封裝函數(shù)還可以用于實現(xiàn)狀態(tài)機、任務調度等復雜的系統(tǒng)功能。
在C語言中,結構體不僅可以封裝數(shù)據(jù),還可以封裝函數(shù)指針。 這種方式可以用于實現(xiàn)回調函數(shù)、狀態(tài)機等,提高代碼的復用性和可維護性。 特別是在嵌入式當中,應用是非常多的。
結構體封裝函數(shù)的作用:
- 將函數(shù)指針和參數(shù)打包成一個結構體,實現(xiàn)了代碼的模塊化和可復用性。
- 在結構體中可以定義多個函數(shù)指針,實現(xiàn)了對函數(shù)的分類管理和調用。
- 結構體可以作為函數(shù)的參數(shù)或返回值,傳遞和返回函數(shù)指針和參數(shù)。
結構體封裝函數(shù)的應用:
- 回調函數(shù):將函數(shù)指針和參數(shù)打包成一個結構體,傳遞給API函數(shù),在API函數(shù)內部執(zhí)行該函數(shù)。
- 狀態(tài)機:將每個狀態(tài)對應的處理函數(shù)封裝成一個結構體,根據(jù)當前狀態(tài)調用相應的處理函數(shù)。
- 事件驅動:將事件處理函數(shù)封裝成一個結構體,通過事件觸發(fā)調用相應的處理函數(shù)。
- 線程池:將任務處理函數(shù)封裝成一個結構體,加入任務隊列后由線程池調用執(zhí)行
結構體封裝函數(shù)的好處:
- 更好的隱藏實現(xiàn)細節(jié):結構體封裝函數(shù)使得函數(shù)的實現(xiàn)細節(jié)被封裝在結構體內部,只有結構體暴露給外部的函數(shù)指針,實現(xiàn)了良好的封裝和信息隱藏。
- 更加靈活的函數(shù)調用:函數(shù)指針可以被動態(tài)修改,從而實現(xiàn)動態(tài)的函數(shù)調用。 例如,在狀態(tài)機中,根據(jù)不同的狀態(tài),可以將相應的處理函數(shù)指針賦值給一個函數(shù)指針變量,從而實現(xiàn)狀態(tài)的轉換和函數(shù)的調用。
- 更加方便的擴展性:結構體封裝函數(shù)可以輕松地添加新的函數(shù)指針,從而擴展功能。 在需要添加新功能時,只需要定義一個新的函數(shù)指針,并添加到結構體中,就可以實現(xiàn)功能的擴展,而不需要修改原有的代碼。
- 更加通用的代碼:結構體封裝函數(shù)可以使用于各種不同的編程范式,例如面向對象編程(OOP)和函數(shù)式編程(FP),從而實現(xiàn)通用的代碼。 例如,在OOP中,結構體可以被看作是一個對象,函數(shù)指針可以被看作是對象的方法,從而實現(xiàn)OOP編程的思想。
- 更加易于維護:結構體封裝函數(shù)使得代碼更加清晰、易于維護和修改。 由于函數(shù)指針的定義和使用都在結構體內部,因此修改或調整代碼時,只需要修改結構體中的函數(shù)指針定義或調用方式,而不需要修改其他部分的代碼,從而使得代碼更加健壯、易于維護和修改
- 模塊化:通過結構體封裝函數(shù),可以將多個函數(shù)和數(shù)據(jù)結構組合成一個模塊,以便于模塊化設計和維護。 這種方法可以將代碼的復雜性分解到不同的模塊中,降低了代碼的耦合性,提高了代碼的可讀性和可維護性。
- 代碼復用:結構體封裝的函數(shù)可以通過傳遞結構體的方式重用同一個函數(shù)。 這種方式可以大大減少代碼量,提高代碼的復用性和可維護性。
- 可擴展性:當需要增加新的功能時,只需增加新的函數(shù)和數(shù)據(jù)結構,而不需要修改現(xiàn)有代碼。 這種方式可以大大減少代碼的修改和調試時間,提高代碼的可擴展性和可維護性。
- 保護數(shù)據(jù):通過結構體封裝函數(shù),可以將數(shù)據(jù)和函數(shù)封裝在一個結構體中,防止外部代碼對數(shù)據(jù)的非法訪問和修改。
- 提高安全性:將函數(shù)和數(shù)據(jù)封裝在一個結構體中,可以防止其他函數(shù)對數(shù)據(jù)的非法操作,從而提高程序的安全性。
舉例1
1/* 定義封裝函數(shù)結構體由外部調用*/
2typedef struct {
3 int x;
4 int y;
5 void (*move_up)(int steps);
6 void (*move_down)(int steps);
7 void (*move_left)(int steps);
8 void (*move_right)(int steps);
9} Point;
10
11// 定義結構體中的函數(shù)
12void move_up(int steps) {
13 // 向上移動steps個單位
14 // ...
15}
16
17void move_down(int steps) {
18 // 向下移動steps個單位
19 // ...
20}
21
22void move_left(int steps) {
23 // 向左移動steps個單位
24 // ...
25}
26
27void move_right(int steps) {
28 // 向右移動steps個單位
29 // ...
30}
31
32int main() {
33 // 初始化結構體
34 Point point = {
35 .x = 0,
36 .y = 0,
37 .move_up = move_up,
38 .move_down = move_down,
39 .move_left = move_left,
40 .move_right = move_right
41 };
42
43 // 調用結構體中的函數(shù)
44 point.move_up(10);
45 point.move_right(5);
46
47 return 0;
48}
在上面的示例代碼中,我們定義了一個結構體Point,其中包含了兩個整型變量x和y,以及四個函數(shù)指針move_up、move_down、move_left和move_right。 每個函數(shù)指針指向一個移動函數(shù),用于在平面坐標系中移動點的位置。 通過使用結構體封裝函數(shù),我們可以將函數(shù)和數(shù)據(jù)封裝在一起,方便地進行操作和管理。
在main()函數(shù)中,我們首先通過初始化的方式,將結構體中的成員變量和函數(shù)指針初始化。 然后,我們使用結構體中的函數(shù)指針,調用了move_up()和move_right()函數(shù),分別將點向上移動10個單位和向右移動5個單位。
值得注意的是,在實際應用中,我們需要根據(jù)實際情況修改函數(shù)的實現(xiàn),以及結構體中的成員變量和函數(shù)指針的數(shù)量和類型。 同時避免濫用。
舉例2
1typedef struct {
2 void (*init)(void);
3 void (*write)(uint8_t data);
4 uint8_t (*read)(void);
5} spi_t;
6
7void spi_init(void) {
8 /* SPI初始化代碼 */
9}
10
11void spi_write(uint8_t data) {
12 /* SPI寫入數(shù)據(jù) */
13}
14
15uint8_t spi_read(void) {
16 /* SPI讀取數(shù)據(jù) */
17}
18
19int main(void) {
20 spi_t spi = {spi_init, spi_write, spi_read};
21
22 spi.init();
23 spi.write(0xAA);
24 uint8_t data = spi.read();
25
26 return 0;
27}
在舉例2這個例子中,我們定義了一個spi_t類型的結構體,它包含了三個成員函數(shù)指針,分別對應SPI總線的初始化、寫入和讀取操作。 在main函數(shù)中,我們定義了一個spi結構體變量,并且初始化它的函數(shù)指針成員。 接下來,我們通過spi結構體變量的函數(shù)指針成員,分別調用了SPI總線的初始化、寫入和讀取操作。
使用結構體封裝函數(shù)可以使代碼更加清晰明了,減少了代碼的冗余和重復,同時也方便代碼的擴展和維護。
舉例3
假設我們需要控制一個LED燈的亮度,可以使用PWM(脈沖寬度調制)技術來實現(xiàn)。 為了方便控制,我們可以使用一個結構體來封裝控制LED燈的函數(shù)和變量。
1typedef struct {
2 uint8_t duty_cycle; // 占空比
3 void (*set_duty_cycle)(uint8_t duty_cycle); // 設置占空比的函數(shù)指針
4 void (*start)(void); // 啟動PWM輸出的函數(shù)指針
5 void (*stop)(void); // 停止PWM輸出的函數(shù)指針
6} pwm_control_t;
7
8// 設置占空比
9void set_duty_cycle(uint8_t duty_cycle) {
10 // 設置占空比的代碼
11}
12
13// 啟動PWM輸出
14void start_pwm(void) {
15 // 啟動PWM輸出的代碼
16}
17
18// 停止PWM輸出
19void stop_pwm(void) {
20 // 停止PWM輸出的代碼
21}
22
23int main(void) {
24 pwm_control_t pwm;
25
26 pwm.duty_cycle = 50; // 設置占空比為50%
27 pwm.set_duty_cycle = set_duty_cycle;
28 pwm.start = start_pwm;
29 pwm.stop = stop_pwm;
30
31 pwm.set_duty_cycle(pwm.duty_cycle); // 設置占空比
32 pwm.start(); // 啟動PWM輸出
33
34 while (1) {
35 // 循環(huán)執(zhí)行其他任務
36 }
37}
在上面的代碼中,我們定義了一個名為pwm_control_t的結構體,其中包含了一個占空比成員變量duty_cycle和三個函數(shù)指針set_duty_cycle、start和stop。 set_duty_cycle函數(shù)用于設置占空比,start函數(shù)用于啟動PWM輸出,stop函數(shù)用于停止PWM輸出。
在main函數(shù)中,我們創(chuàng)建了一個pwm_control_t類型的結構體變量pwm,并分別給結構體的成員變量和函數(shù)指針賦值。 接著,我們調用了set_duty_cycle和start函數(shù)來設置占空比和啟動PWM輸出。
結構體封裝函數(shù)的好處在于,我們可以通過創(chuàng)建不同的結構體變量來控制多個LED燈,而且不同的LED燈可以使用不同的PWM參數(shù)。 此外,如果需要修改PWM輸出的實現(xiàn)方式,只需要修改start和stop函數(shù)即可,而不需要修改每個LED燈。
-
嵌入式
+關注
關注
5082文章
19104瀏覽量
304803 -
嵌入式系統(tǒng)
+關注
關注
41文章
3587瀏覽量
129435 -
C語言
+關注
關注
180文章
7604瀏覽量
136685 -
函數(shù)
+關注
關注
3文章
4327瀏覽量
62569 -
結構體
+關注
關注
1文章
130瀏覽量
10840
發(fā)布評論請先 登錄
相關推薦
C語言中數(shù)組和結構體的內存表示和布局
C語言入門書籍《嵌入式Linux C語言程序設計基礎教程》全本下載!!
嵌入式C實現(xiàn)延時程序的不同變量的區(qū)別 幾種Linux嵌入式開發(fā)環(huán)境的簡單介紹

嵌入式C語言中的union語法的作用是什么
嵌入式C語言知識總結

嵌入式C語言中堆和棧的區(qū)別
嵌入式C語言的結構特點
嵌入式系統(tǒng)中C語言結構體的基礎實現(xiàn)與應用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論