

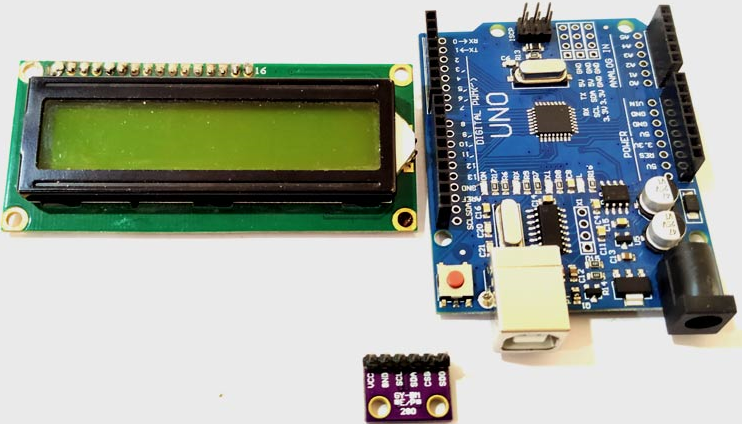
博主最近在調試 bmp280 氣壓傳感器。
1、前言
BOSCH 出的 BMP280 氣壓傳感器,可以用于測量氣壓、海拔高度等。 無人機一般都會使用氣壓計,給飛控定高,還可以做天氣監控,因為溫度和風速的變化都會影響測量結果。
目前已經出了 BMP380、BMP390 ,精度更高。
2、傳感器特性
- 具有數字 I2C、SPI 串口標準輸出。 (I2C up to 3.4 MHz) (SPI 3 and 4 wire, up to 10 MHz)
- 封裝 8-pin LGA,2.0 × 2.5 × 0.95mm,小尺寸適用于很多設備
- 功耗 2.7μA @ 1 Hz 采樣率
- 工作溫度 -40 … +85 °C
- 測壓范圍 300 … 1100 hPa
典型應用
- 增強 GPS 導航(例如,首次修復改進時間、航位推算、坡度檢測)
- 室內導航(樓層檢測、電梯檢測)
- 戶外導航、休閑和體育應用
- 天氣預報
- 醫療保健應用(如肺活量測定)
- 垂直速度指示(例如上升/下降速度)
目標設備
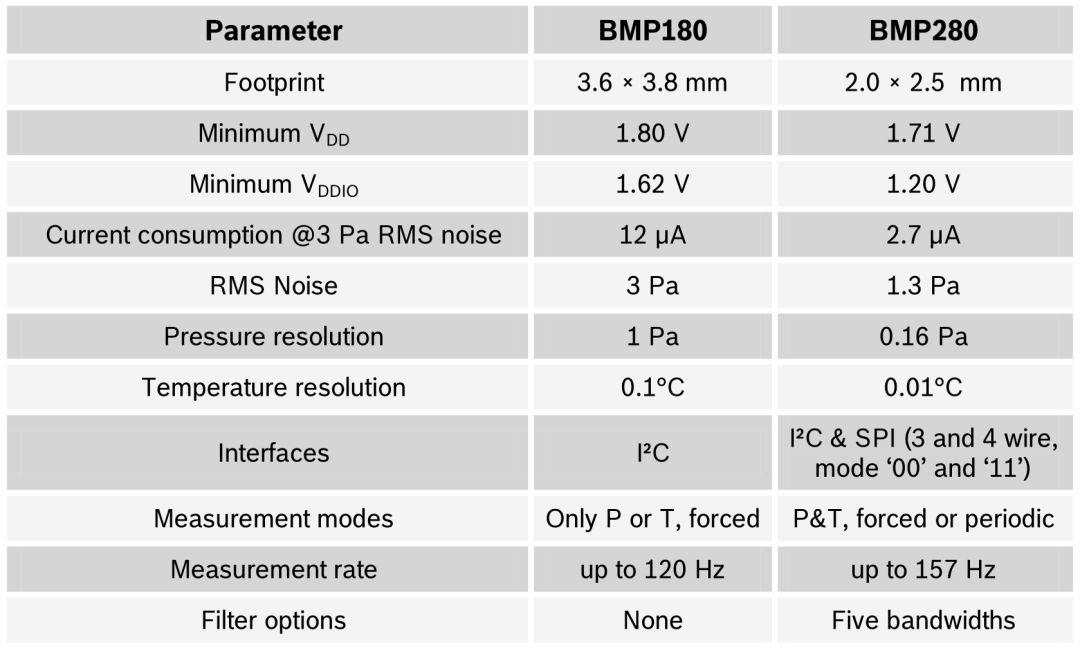
BMP180、BMP280 對比
3、參考資料
bosch 官網有數據手冊
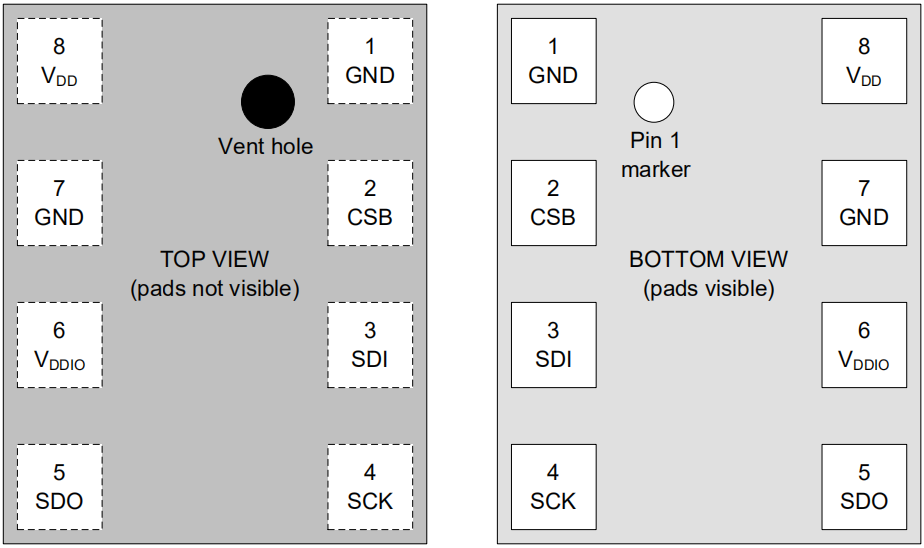
4、引腳說明
一共 8 個 PIN 腳
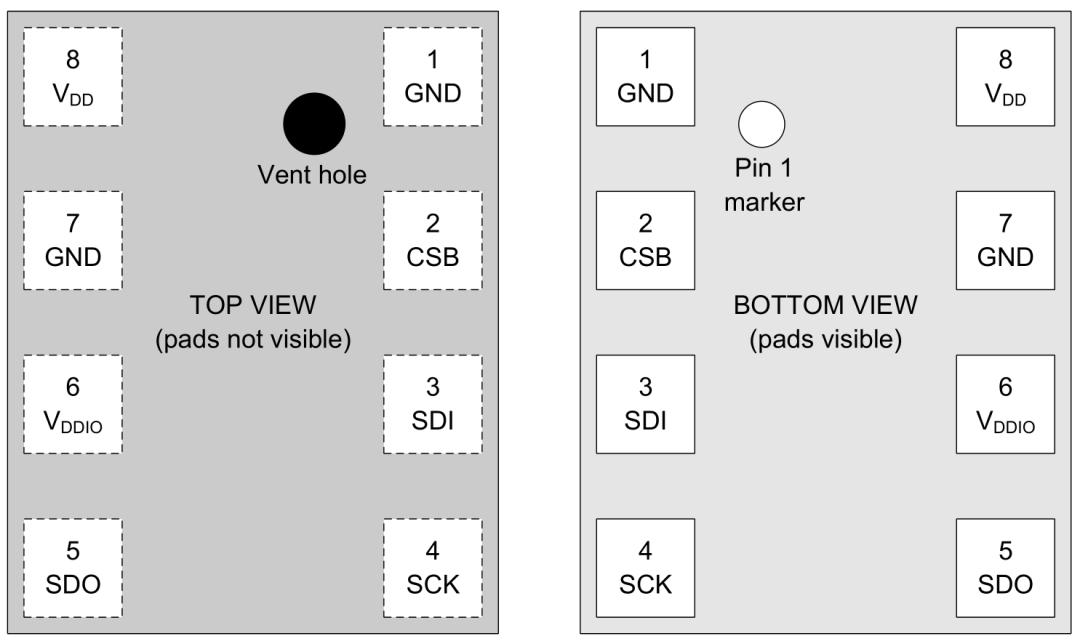
引腳說明
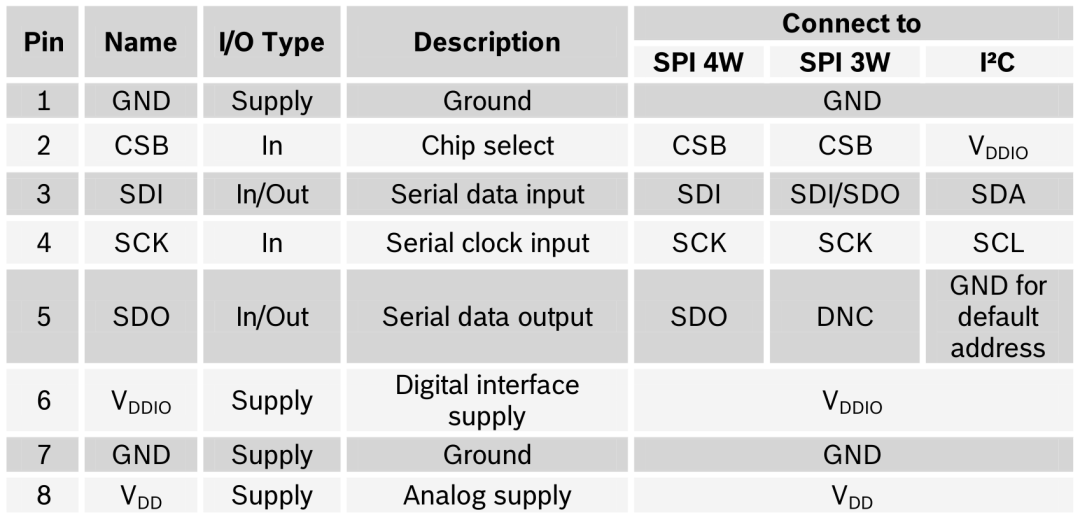
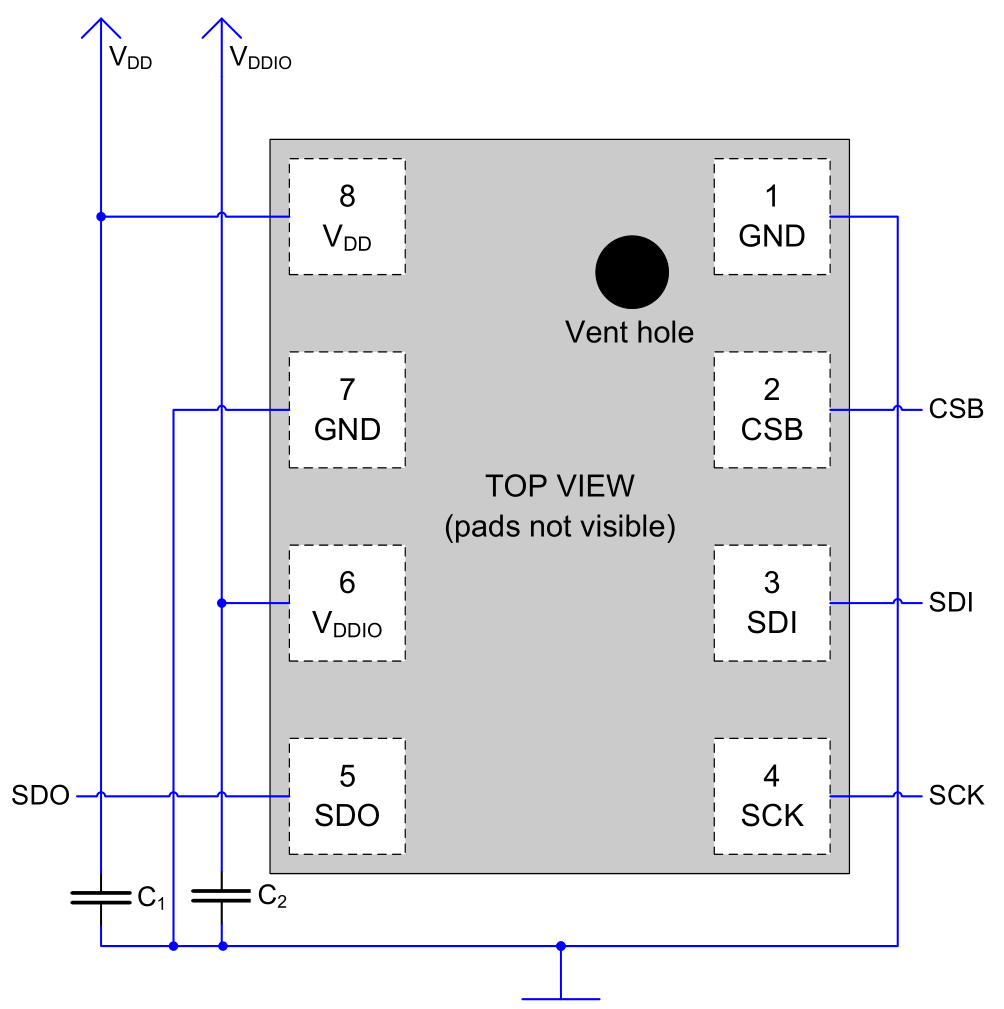
4 線 SPI
3 線 SPI
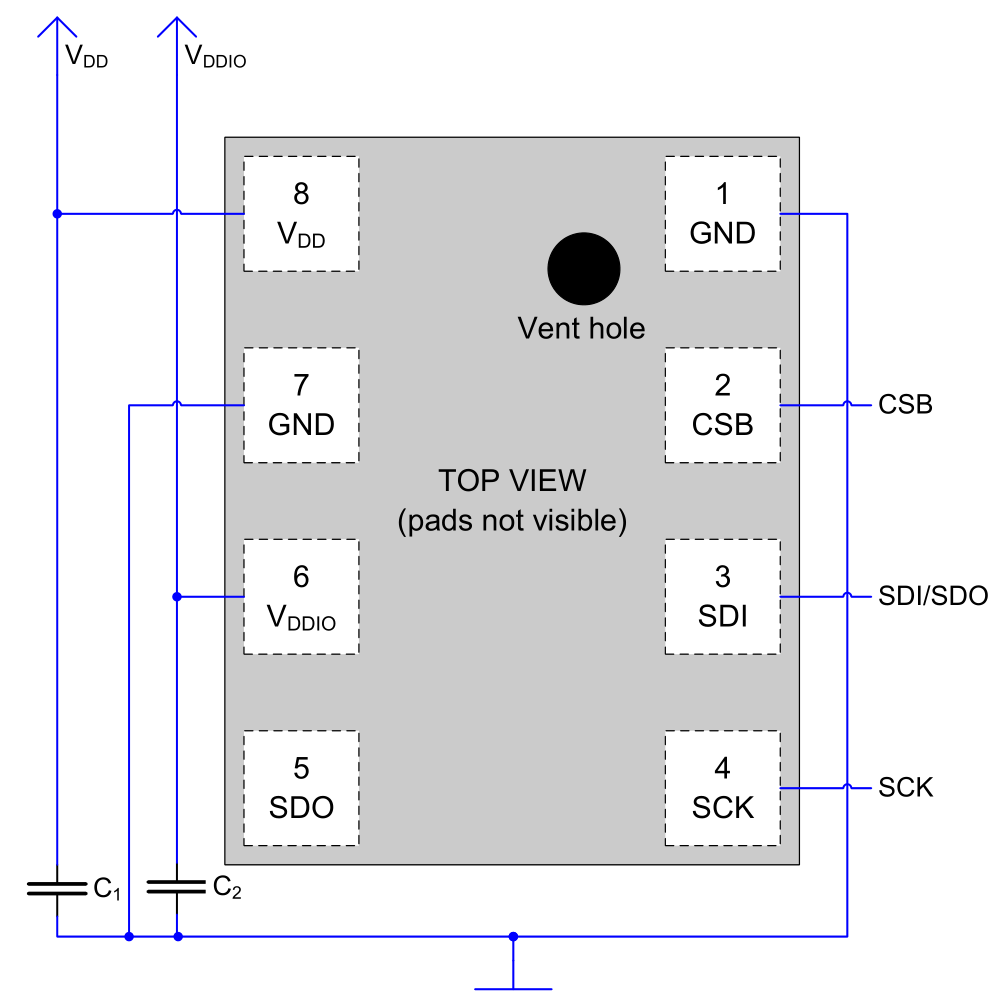
C1, C2 為 100 nF。
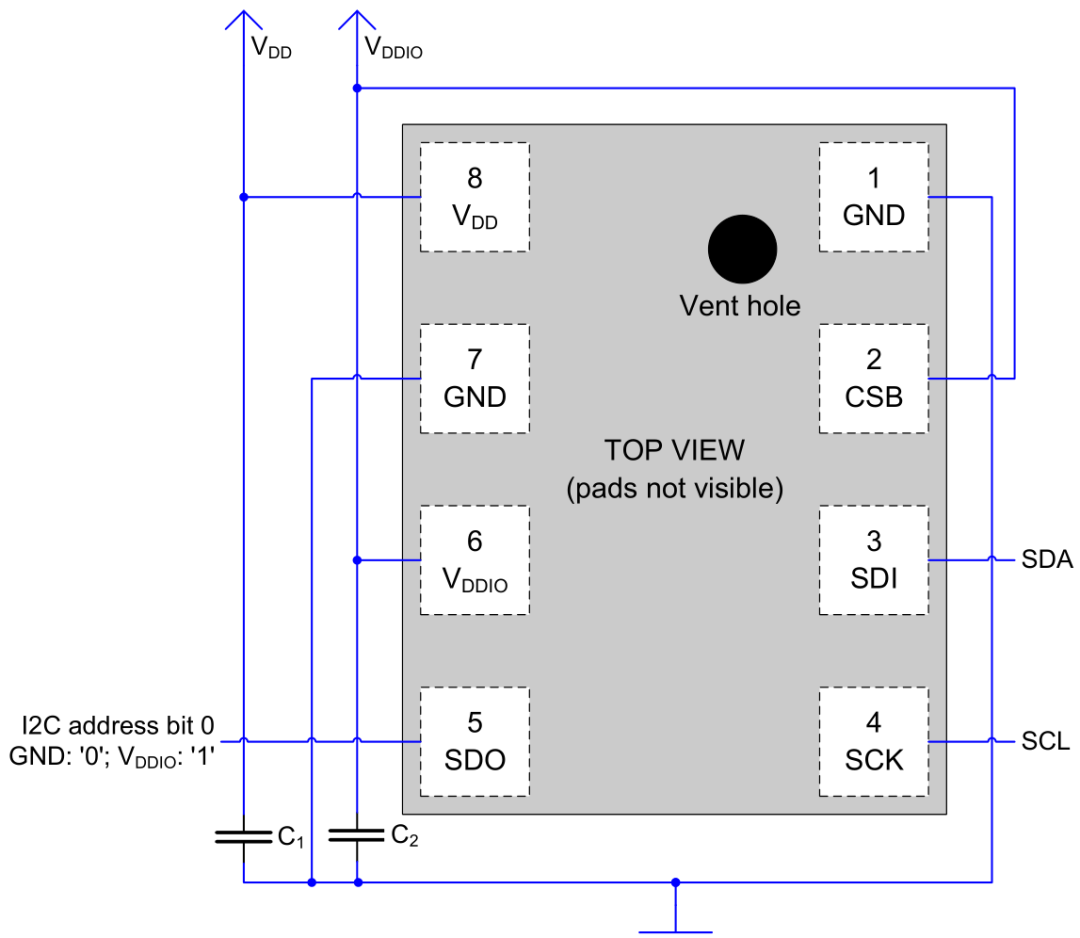
I2C 連接
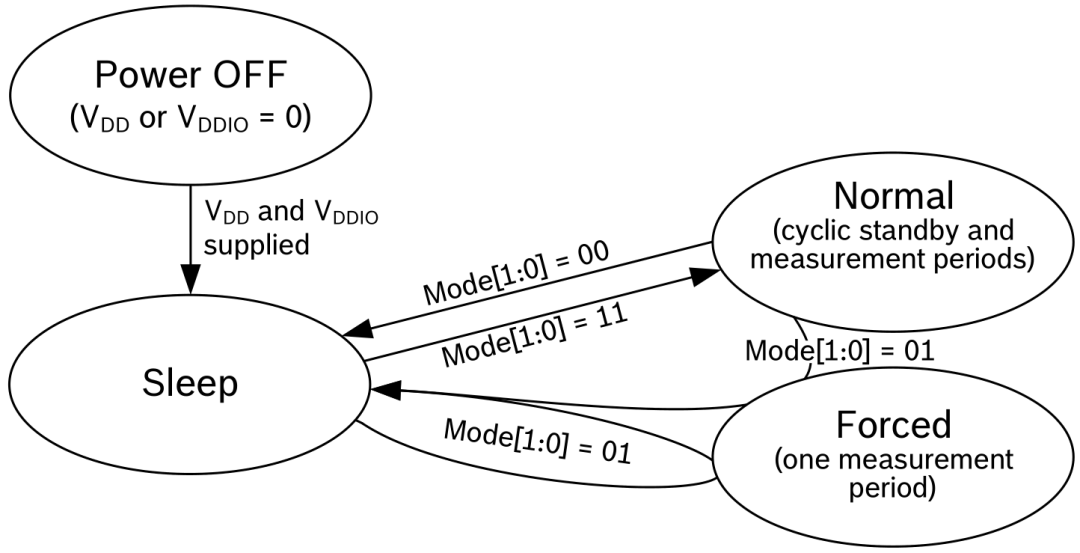
5、工作模式
- 睡眠模式
- 正常模式
- 強制模式
在睡眠模式下,不進行任何測量。 正常模式包括自動在活動測量周期和非活動待機周期之間的永久循環。 在強制模式下,執行單次測量,測量完成后傳感器返回睡眠模式。
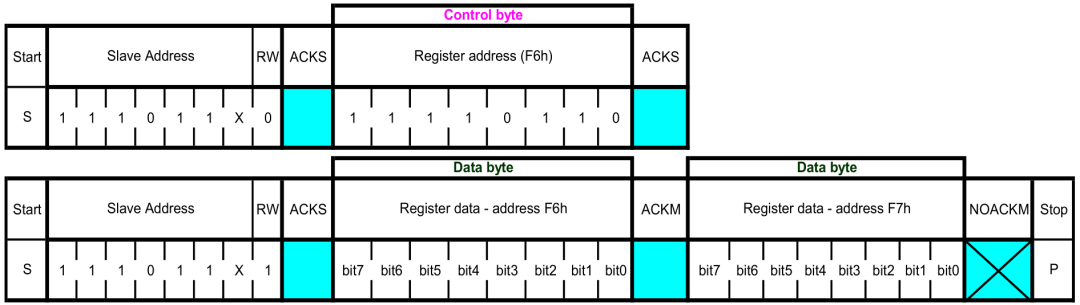
6、I2C 讀寫地址
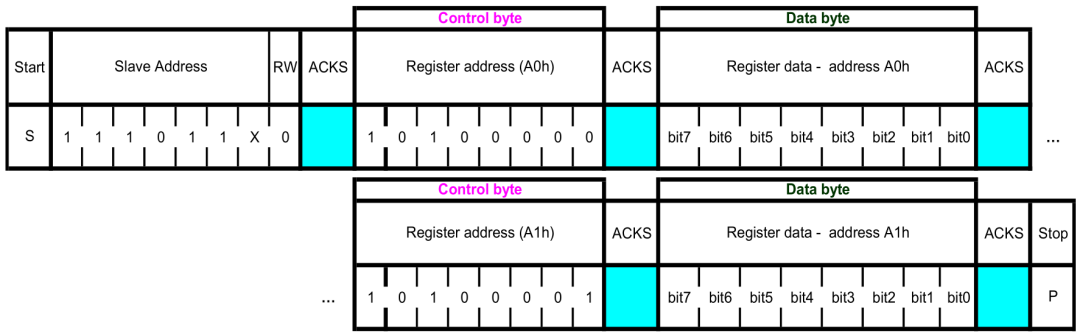
BMP280 從機地址是 111011x ,高 6 bit 是固定的,最后一位 x 和一個 PIN 的狀態有關系。 如果 SDO 是高,從機地址是 1110111 (0x77)。 如果 SDO 是低,從機地址是 1110110 (0x76)。
這個方案可以使得一路 I2C bus 掛兩個 bmp280,同時使用。
I2C 寫入
I2C 讀取
另外,該器件支持 SPI mode ‘00’ (CPOL = CPHA = ‘0’) and mode ‘11’ (CPOL= CPHA = ‘1’). SPI 支持 4-wire and 3-wire。 詳情參看數據手冊。
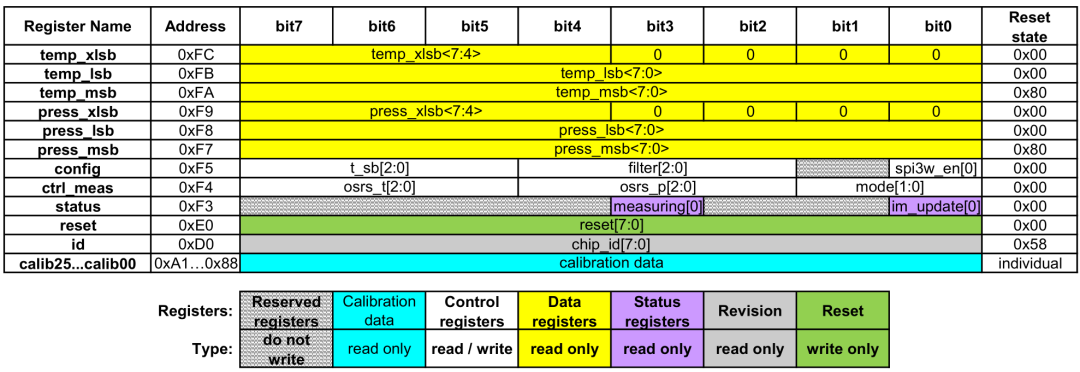
7、寄存器
#define BMP280_ADDRESS 0x76 //從設備地址
#define BMP280_RESET_VALUE 0xB6 //復位寄存器寫入值
#define BMP280_CHIPID_REG 0xD0 /*Chip ID Register */
#define BMP280_RESET_REG 0xE0 /*Softreset Register */
#define BMP280_STATUS_REG 0xF3 /*Status Register */
#define BMP280_CTRLMEAS_REG 0xF4 /*Ctrl Measure Register */
#define BMP280_CONFIG_REG 0xF5 /*Configuration Register */
#define BMP280_PRESSURE_MSB_REG 0xF7 /*Pressure MSB Register */
#define BMP280_PRESSURE_LSB_REG 0xF8 /*Pressure LSB Register */
#define BMP280_PRESSURE_XLSB_REG 0xF9 /*Pressure XLSB Register */
#define BMP280_TEMPERATURE_MSB_REG 0xFA /*Temperature MSB Reg */
#define BMP280_TEMPERATURE_LSB_REG 0xFB /*Temperature LSB Reg */
#define BMP280_TEMPERATURE_XLSB_REG 0xFC /*Temperature XLSB Reg */
//狀態寄存器轉換標志
#define BMP280_MEASURING 0x01
#define BMP280_IM_UPDATE 0x08
- 第一個 chip_id 寄存器。
- 第二個復位寄存器,向 0xE0 寫 0xB6 復位。
- 狀態寄存器,兩個狀態:一個是 MEASURING,一個是 UPDATE。
- 4 和 5 寄存器用來設置它的模式。
- 最后 6 個是數據寄存器,XLSB 是小數位的意思,后面用來浮點轉化用。
8、代碼
博主用的是輪詢去讀數據,大家也可以配置成中斷方式。
初始化部分,主要是讀補償參數、設置工作模式、設置過采樣參數等:
BMP280 bmp280_inst;
BMP280* bmp280 = &bmp280_inst; //這個全局結構體變量用來保存存在芯片內ROM補償參數
void Bmp_Init(void)
{
u8 Lsb,Msb;
/********************接下來讀出矯正參數*********************/
//溫度傳感器的矯正值
Lsb = BMP280_Read_Byte(BMP280_DIG_T1_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_T1_MSB_REG);
bmp280->T1 = (((u16)Msb)<<8) + Lsb; //高位加低位
Lsb = BMP280_Read_Byte(BMP280_DIG_T2_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_T2_MSB_REG);
bmp280->T2 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_T3_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_T3_MSB_REG);
bmp280->T3 = (((u16)Msb)<<8) + Lsb;
//大氣壓傳感器的矯正值
Lsb = BMP280_Read_Byte(BMP280_DIG_P1_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P1_MSB_REG);
bmp280->P1 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P2_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P2_MSB_REG);
bmp280->P2 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P3_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P3_MSB_REG);
bmp280->P3 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P4_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P4_MSB_REG);
bmp280->P4 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P5_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P5_MSB_REG);
bmp280->P5 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P6_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P6_MSB_REG);
bmp280->P6 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P7_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P7_MSB_REG);
bmp280->P7 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P8_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P8_MSB_REG);
bmp280->P8 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P9_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P9_MSB_REG);
bmp280->P9 = (((u16)Msb)<<8) + Lsb;
/******************************************************/
BMP280_Write_Byte(BMP280_RESET_REG,BMP280_RESET_VALUE); //往復位寄存器寫入給定值
BMP_OVERSAMPLE_MODE BMP_OVERSAMPLE_MODEStructure;
BMP_OVERSAMPLE_MODEStructure.P_Osample = BMP280_P_MODE_3;
BMP_OVERSAMPLE_MODEStructure.T_Osample = BMP280_T_MODE_1;
BMP_OVERSAMPLE_MODEStructure.WORKMODE = BMP280_NORMAL_MODE;
BMP280_Set_TemOversamp(&BMP_OVERSAMPLE_MODEStructure);
BMP_CONFIG BMP_CONFIGStructure;
BMP_CONFIGStructure.T_SB = BMP280_T_SB1;
BMP_CONFIGStructure.FILTER_COEFFICIENT = BMP280_FILTER_MODE_4;
BMP_CONFIGStructure.SPI_EN = DISABLE;
BMP280_Set_Standby_FILTER(&BMP_CONFIGStructure);
}
BMP280.H
#include "myiic.h"
#include "sys.h"
//#include
#define BMP280_ADDRESS 0xEC
//#define BMP280_ADDRESS (0x76 << 1)
#define BMP280_RESET_VALUE 0xB6
#define BMP280_CHIPID_REG 0xD0 /*Chip ID Register */
#define BMP280_RESET_REG 0xE0 /*Softreset Register */
#define BMP280_STATUS_REG 0xF3 /*Status Register */
#define BMP280_CTRLMEAS_REG 0xF4 /*Ctrl Measure Register */
#define BMP280_CONFIG_REG 0xF5 /*Configuration Register */
#define BMP280_PRESSURE_MSB_REG 0xF7 /*Pressure MSB Register */
#define BMP280_PRESSURE_LSB_REG 0xF8 /*Pressure LSB Register */
#define BMP280_PRESSURE_XLSB_REG 0xF9 /*Pressure XLSB Register */
#define BMP280_TEMPERATURE_MSB_REG 0xFA /*Temperature MSB Reg */
#define BMP280_TEMPERATURE_LSB_REG 0xFB /*Temperature LSB Reg */
#define BMP280_TEMPERATURE_XLSB_REG 0xFC /*Temperature XLSB Reg */
#define BMP280_MEASURING 0x01
#define BMP280_IM_UPDATE 0x08
/*calibration parameters */
#define BMP280_DIG_T1_LSB_REG 0x88
#define BMP280_DIG_T1_MSB_REG 0x89
#define BMP280_DIG_T2_LSB_REG 0x8A
#define BMP280_DIG_T2_MSB_REG 0x8B
#define BMP280_DIG_T3_LSB_REG 0x8C
#define BMP280_DIG_T3_MSB_REG 0x8D
#define BMP280_DIG_P1_LSB_REG 0x8E
#define BMP280_DIG_P1_MSB_REG 0x8F
#define BMP280_DIG_P2_LSB_REG 0x90
#define BMP280_DIG_P2_MSB_REG 0x91
#define BMP280_DIG_P3_LSB_REG 0x92
#define BMP280_DIG_P3_MSB_REG 0x93
#define BMP280_DIG_P4_LSB_REG 0x94
#define BMP280_DIG_P4_MSB_REG 0x95
#define BMP280_DIG_P5_LSB_REG 0x96
#define BMP280_DIG_P5_MSB_REG 0x97
#define BMP280_DIG_P6_LSB_REG 0x98
#define BMP280_DIG_P6_MSB_REG 0x99
#define BMP280_DIG_P7_LSB_REG 0x9A
#define BMP280_DIG_P7_MSB_REG 0x9B
#define BMP280_DIG_P8_LSB_REG 0x9C
#define BMP280_DIG_P8_MSB_REG 0x9D
#define BMP280_DIG_P9_LSB_REG 0x9E
#define BMP280_DIG_P9_MSB_REG 0x9F
typedef enum {
BMP280_SLEEP_MODE = 0x0,
BMP280_FORCED_MODE = 0x1, //???0x2
BMP280_NORMAL_MODE = 0x3
} BMP280_WORK_MODE;
typedef enum
{
BMP280_P_MODE_SKIP = 0x0, /*skipped*/
BMP280_P_MODE_1, /*x1*/
BMP280_P_MODE_2, /*x2*/
BMP280_P_MODE_3, /*x4*/
BMP280_P_MODE_4, /*x8*/
BMP280_P_MODE_5 /*x16*/
} BMP280_P_OVERSAMPLING;
typedef enum {
BMP280_T_MODE_SKIP = 0x0, /*skipped*/
BMP280_T_MODE_1, /*x1*/
BMP280_T_MODE_2, /*x2*/
BMP280_T_MODE_3, /*x4*/
BMP280_T_MODE_4, /*x8*/
BMP280_T_MODE_5 /*x16*/
} BMP280_T_OVERSAMPLING;
//IIR
typedef enum {
BMP280_FILTER_OFF = 0x0, /*filter off*/
BMP280_FILTER_MODE_1, /*0.223*ODR*/ /*x2*/
BMP280_FILTER_MODE_2, /*0.092*ODR*/ /*x4*/
BMP280_FILTER_MODE_3, /*0.042*ODR*/ /*x8*/
BMP280_FILTER_MODE_4 /*0.021*ODR*/ /*x16*/
} BMP280_FILTER_COEFFICIENT;
typedef enum {
BMP280_T_SB1 = 0x0, /*0.5ms*/
BMP280_T_SB2, /*62.5ms*/
BMP280_T_SB3, /*125ms*/
BMP280_T_SB4, /*250ms*/
BMP280_T_SB5, /*500ms*/
BMP280_T_SB6, /*1000ms*/
BMP280_T_SB7, /*2000ms*/
BMP280_T_SB8, /*4000ms*/
} BMP280_T_SB;
typedef struct
{
/* T1~P9 */
uint16_t T1;
int16_t T2;
int16_t T3;
uint16_t P1;
int16_t P2;
int16_t P3;
int16_t P4;
int16_t P5;
int16_t P6;
int16_t P7;
int16_t P8;
int16_t P9;
} BMP280;
typedef long signed int BMP280_S32_t;
typedef long unsigned int BMP280_U32_t;
typedef long long signed int BMP280_S64_t;
#define dig_T1 bmp280->T1
#define dig_T2 bmp280->T2
#define dig_T3 bmp280->T3
#define dig_P1 bmp280->P1
#define dig_P2 bmp280->P2
#define dig_P3 bmp280->P3
#define dig_P4 bmp280->P4
#define dig_P5 bmp280->P5
#define dig_P6 bmp280->P6
#define dig_P7 bmp280->P7
#define dig_P8 bmp280->P8
#define dig_P9 bmp280->P9
/************************************************CUT****************************************/
typedef struct
{
BMP280_P_OVERSAMPLING P_Osample;
BMP280_T_OVERSAMPLING T_Osample;
BMP280_WORK_MODE WORKMODE;
} BMP_OVERSAMPLE_MODE;
typedef struct
{
BMP280_T_SB T_SB;
BMP280_FILTER_COEFFICIENT FILTER_COEFFICIENT;
FunctionalState SPI_EN;
} BMP_CONFIG;
extern BMP280* bmp280;
u8 BMP280_Check(void);
void BMP280_Set_TemOversamp(BMP_OVERSAMPLE_MODE * Oversample_Mode);
void BMP280_Set_Standby_FILTER(BMP_CONFIG * BMP_Config);
void Bmp_Init(void);
u8 BMP280_GetStatus(u8 status_flag);
//long BMP280_Get_Pressure(void);
double BMP280_Get_Pressure(void);
double bmp280_compensate_T_double(BMP280_S32_t adc_T);
double bmp280_compensate_P_double(BMP280_S32_t adc_P);
主函數
void task2_task(void *pvParameters)
{
double BMP_Pressure;
Bmp_Init();
while(1)
{
while(BMP280_GetStatus(BMP280_MEASURING) != RESET);
while(BMP280_GetStatus(BMP280_IM_UPDATE) != RESET);
BMP_Pressure = BMP280_Get_Pressure();
printf("Pressure %f Pa \\r\\n",BMP_Pressure);
}
}
double BMP280_Get_Pressure(void)
{
uint8_t XLsb,Lsb, Msb;
long signed Bit32;
double pressure;
XLsb = I2C_ReadOneByte(BMP280_ADDRESS,BMP280_PRESSURE_XLSB_REG);
Lsb = I2C_ReadOneByte(BMP280_ADDRESS,BMP280_PRESSURE_LSB_REG);
Msb = I2C_ReadOneByte(BMP280_ADDRESS,BMP280_PRESSURE_MSB_REG);
Bit32 = ((long)(Msb << 12))|((long)(Lsb << 4))|(XLsb>>4);
pressure = bmp280_compensate_P_double(Bit32);
return pressure;
}
double bmp280_compensate_P_double(BMP280_S32_t adc_P)
{
double var1, var2, p;
var1 = ((double)t_fine/2.0) - 64000.0;
var2 = var1 * var1 * ((double)dig_P6) / 32768.0;
var2 = var2 + var1 * ((double)dig_P5) * 2.0;
var2 = (var2/4.0)+(((double)dig_P4) * 65536.0);
var1 = (((double)dig_P3) * var1 * var1 / 524288.0 + ((double)dig_P2) * var1) / 524288.0;
var1 = (1.0 + var1 / 32768.0)*((double)dig_P1);
if (var1 == 0.0)
{
return 0; // avoid exception caused by division by zero
}
p = 1048576.0 - (double)adc_P;
p = (p - (var2 / 4096.0)) * 6250.0 / var1;
var1 = ((double)dig_P9) * p * p / 2147483648.0;
var2 = p * ((double)dig_P8) / 32768.0;
p = p + (var1 + var2 + ((double)dig_P7)) / 16.0;
return p;
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2563文章
52589瀏覽量
763762 -
串口
+關注
關注
14文章
1585瀏覽量
78660 -
BOSCH
+關注
關注
14文章
59瀏覽量
54748 -
氣壓傳感器
+關注
關注
4文章
139瀏覽量
21448 -
BMP280
+關注
關注
1文章
20瀏覽量
5952
發布評論請先 登錄
相關推薦
熱點推薦
BMP280壓力溫度傳感器的驅動設計與實現
壓力和溫度監測在嵌入式系統開發中是非常常見的需求,特別是對環境大氣壓力和溫度的檢測需求就更常見了。我們一般都會選擇一些封裝較小操作比較方便的壓力傳感器。BMP280就是滿足這一要求的器件。在這一篇中我們將設計并實現
發表于 12-09 14:32
?3945次閱讀
【TI SimpleLink SensorTag試用體驗】8.數字氣壓計BMP280
本帖最后由 z***hello 于 2016-5-16 17:41 編輯
前面介紹的3個傳感器均是TI出品的低功耗傳感器,此次介紹一下Bosch出品的氣壓傳感器——
發表于 05-15 17:28
【Ti SimpleLink SensorTag試用體驗】+ SensorTag BMP280氣壓傳感器服務加入
http://www.ti.com.cn/ww/wireless_connectivity/sensortag2015/index.htmlBMP280-氣壓傳感器BMP280 是一種
發表于 05-17 12:47
通過BMP280氣壓/溫度傳感器模塊測量大氣壓和溫度
BMP280氣壓/溫度測量一、本例程實現功能二、 傳感器參數配置概述三、接線圖四、完整代碼五、代碼運行結果一、本例程實現功能通過BMP280氣壓
發表于 01-07 06:40
【RVBoards-哪吒】Lab4:大氣壓強傳感器BMP280
本帖最后由 zhangyue510 于 2022-1-15 10:01 編輯
項目名稱:大氣壓強傳感器BMP280模塊代碼地址:rvboards/d1_demo: The demo
發表于 01-15 09:50
氣壓傳感器bmp280與ms5611哪個好
本文開始闡述了BMP280的定義與BMP280的應用程序,其次闡述了MS5611的定義、MS5611參數、MS5611的分類與典型應用,最后詳細分析了氣壓傳感器
發表于 03-08 09:08
?2.7w次閱讀
BMP280氣壓傳感器的特點性能及應用
Bosch 的 BMP280 是一種專為移動應用設計的絕對氣壓傳感器。該傳感器模塊采用極其緊湊的封裝。得益于小尺寸和低功耗特性,這種器件可用在如移動電話、GPS 模塊或手表等電池供電型
單片機-bmp280大氣壓強與溫度傳感器使用詳解
單片機 BMP280大氣壓強與溫度傳感器使用詳解 轉載:https://blog.csdn.net/sunshinebooming/article/details/79637822最近實習中一個項目要用到多種
發表于 12-22 19:30
?31次下載

博世BMP280數字氣壓傳感器介紹
BMP280是博世最新推出的數字氣壓傳感器,具有卓越的性能和低廉的價格,相對精度為±0.12 hPa(相當于±1米),傳感器功耗僅有2.7μA,包括壓力和溫度測量功能。
發表于 07-20 11:12
?8576次閱讀
將BMP280壓力傳感器模塊與Arduino連接的方法
如果您想構建自己的溫度監測系統或測量無人機的高度,或者只是想測量您所在地區的大氣壓力,那么您在項目中使用的最佳模塊之一就是BMP280 壓力傳感器模塊。BMP280是絕對壓力和溫度監測





 工商網監
工商網監

評論