 無刷電機常用的位置檢測方法
無刷電機常用的位置檢測方法
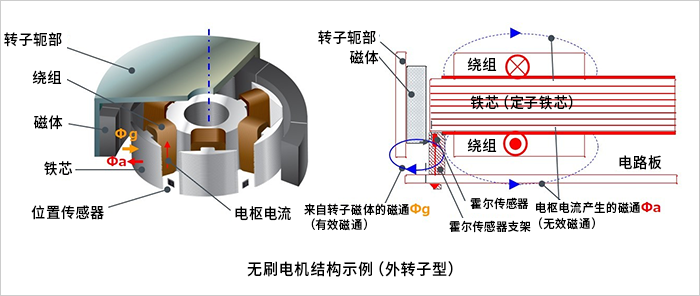
上一篇文章我們講了一些無刷電機的基礎知識,包括無刷電機的內部結構,驅動原理等,我們知道了只需要按照轉子的當前位置,來按順序給定子線圈通電,就能讓電機轉動起來。
但是,上一篇中我們跳過了一個關鍵步驟,就是如何檢測轉子的位置。本篇我們就講講常用的位置檢測方法,以及引出的一些相關問題。
1)霍爾傳感器檢測位置驅動
我們知道,獲取磁鐵的位置可以用霍爾傳感器,無刷電機的轉子就是永磁體,因此只要在合適的位置安裝霍爾傳感器,就能知道轉子的旋轉位置。
在無刷電機中,一般用3個開關型霍爾器件就能檢測轉子的位置。霍爾的安裝位置可以相隔120°,也可以相隔60°,我們以下圖3N2P型電機,霍爾相隔120°的安裝方式為例:
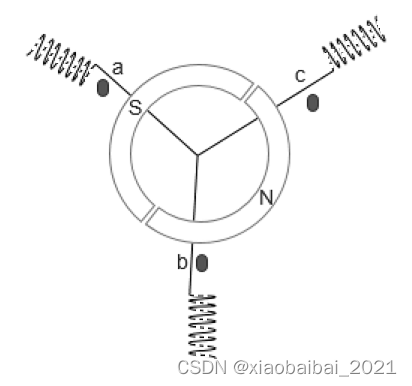
a、b、c是三個霍爾傳感器。當N極接近霍爾a時,a輸出高電平1;當N遠離a時,a輸出低電平。同理b、c也是一樣的特性。
因為2P的轉子是一對極,所以在轉子逆時針轉動一周時,a、b、c霍爾的輸出波形就都會高低電平變化一次,如下圖所示:

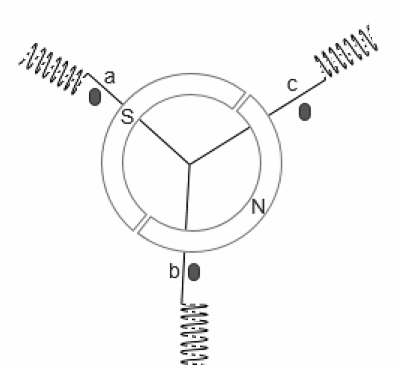
例如,下圖中,轉子當前的位置會使得霍爾輸出cba = 110:

這樣我們通過霍爾傳感器的輸出,可以確定轉子的當前位置,再結合上一篇講的方法,就可以使它轉動起來了。
如果我們想使用“二二導通”的方法讓它逆時針轉動,在圖中位置cba = 110,則應該使得B線圈加正電壓C線圈加負電壓A懸空;這個加電狀態保持到N極轉到接近c位置時,霍爾輸出會自動變為cba = 100,則我們的加電狀態應該變為A線圈加正電壓C線圈加負電壓B線圈懸空,才能讓轉子繼續逆時針轉動。
不難發現,三個霍爾的輸出在一個周期內是6個狀態,正好對應了“二二導通”法電機轉動一圈時對線圈通電的6個狀態。
于是,我們只需要用abc三個霍爾的輸出來控制ABC三個線圈的加電狀態,就能控制電機連續地轉動起來了。
具體來說,逆時針轉動時,如下切換:

順時針轉動時,如下切換:

至此,有霍爾感的無刷電機驅動,就可以用上述方法驅動起來了。
關于有傳感器的位置檢測,還有許多其他方法,如編碼器、光電傳感器、旋轉變壓器等等。后續小白白會專門寫一篇文章講解。
2)無傳感器(檢測反電動勢)驅動
在一些微、小電機系統中,安裝位置傳感器對電機的體積和成本會有不利影響,因此,無傳感器的位置檢測技術也非常有實用價值。我們先來講解它的原理,再聊聊它的優缺點。
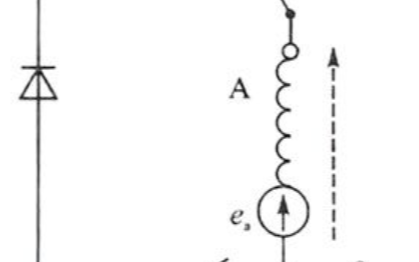
我們以下面這張圖為例:

對比一下上節中有傳感器的驅動方式,在這個位置,是B線圈加正電壓C線圈加負電壓A線圈懸空。
電機的轉子磁鐵在轉動時,顯然在A線圈上會有產生一個感應電動勢。假如當轉子磁鐵轉動時,S極先接近線圈A,然后從另一邊遠離線圈A,在線圈A中產生的感應電動勢就會有一個由正變為負的過程(或者由負變正),也即是感應電動勢會有一個過零點。(注意一下,這里的感應電動勢過零點,是以三個線圈的中心連接點為參考點的)。
所以,我們可以在電機轉動時,檢測不加電的那一相的感應電動勢得過零點,就能知道轉子的位置了。
檢測過零點的方法有很多種,可以用比較器,如下圖的電路,是檢測其中一相的示例:

注意圖中的中點電壓,一般無刷電機是不會把中點引出來的,要通過其他方式獲取,可以用三相線串電阻后連到一起得到。下圖是一種經典的獲取中心點電壓的方法,左邊是三相線上取的電壓,右邊輸出是中心點和三相過零的檢測點:

上圖中的電阻值可以依據供電調整,主要是分壓用的。
另外,電機轉動起來時、以及用PWM控制時,都會產生很多干擾,在過零比較時需要加入濾波電路,上圖中的電容就是一種簡單的濾波方法,但是要注意,加電容濾波以后會造成電壓的相位滯后,所以電容值不能過大。如果是通過軟件采集后再判斷過零點,也可以通過軟件來濾波。
檢測到轉子的位置,就可以據此進行換向了,最佳換向位置是在過零點之后30°。那么如何知道轉過30°需要多長時間呢?
通常的方法,是近似認為轉子的轉速是均勻的,從上一次換相到本次過零的時間,就約等于本次過零到下次換相的時間。由此,我們只需要用單片機進行計時,就可以知道近似的30°的換向位置。
另一種更加簡單直接的方法,是在檢測到過零點后,立即進行換向,這種方法換向位置不是最佳的,會損失一些效率,但是設計起來最簡單。
至此,無傳感器的位置檢測和驅動方法,我們已經基本了解了。
但是,此時又出現了一個新問題,在初始啟動、轉子還沒有轉動時,磁鐵和線圈沒有相對運動,線圈里是沒有感應電動勢產生的,那該怎樣確定轉子的位置呢?我們看下一節,無傳感器電機的啟動問題。
3)無傳感器的電機啟動問題
由于無傳感器的模式,需要靠感應電動勢來判斷轉子的位置,所以電機剛開始啟動時,或者轉速很低時,感應電動勢很小,是無法用來檢測位置的。所以無傳感器的無刷電機的啟動是個難點問題。
一般的方法是采用三段法啟動,即先預定位,再啟動加速,最后進入閉環控制。具體的實現方法如下:
a)預定位
就是先給某兩相通電一小會兒,讓轉子轉到預定的位置;這個通電時間、占空比需要依據不同的電機和負載情況確定;否則可能會由于長時間在一個線圈上加電燒壞,或者時間太短不能預定位。
b)啟動加速
就是依據所要轉動的方向,依次給各相加電(換相);啟動的過程,需要多次換相,并逐漸加速;同樣的,這個加速過程也與具體的電機和負載相關,需要測試來確定,換相頻率太低,電機加速慢,線圈也會發熱嚴重;換相頻率太高,電機運行起來容易失步,導致加速失敗。
常見的加速有三種方式:恒頻升壓法、恒壓升頻法、升頻升壓法,字面意思就可以理解,就不多解釋了;如某些航模電調,加速時,每次延時時間比上一次減少1/25,直到電機完全轉起來。
c)閉環控制
當啟動加速到一定轉速時,反電動勢及其過零點可以被穩定的檢測到時,就可以切換到閉環控制狀態,也就是按上一節的控制邏輯進行換相驅動了。
由無感驅動的方法可以看出,它的啟動是比較復雜的,在低速運轉時感應電動勢較小時也運行困難,所以無感無刷電機不合適用在頻繁啟停、低速運轉的場合,而比較適合用于體積、成本受限、運行速度比較高的場合。
4)無刷電機的速度控制
通過上述講解,我們知道了,無論是有感還是無感無刷電機,在轉動時,是靠轉子的位置去確定下一時刻的通電狀態,而轉到下一個位置的時間只與供電電壓相關,所以,無刷電機調速時,最簡單得方法是調整供電電壓,或者使用PWM控制。
使用PWM控制時,常用的方法是在導通區間內,上下橋臂其中之一恒通、另一半用PWM控制,如下圖所示,左圖是下橋臂恒通上橋臂PWM控制的方式,右圖是上橋臂恒通下橋臂PWM控制的方式:

-
霍爾傳感器
+關注
關注
27文章
723瀏覽量
63171 -
無刷電機
+關注
關注
57文章
838瀏覽量
45823 -
霍爾器件
+關注
關注
1文章
22瀏覽量
6839 -
永磁體
+關注
關注
0文章
124瀏覽量
5483
發布評論請先 登錄
相關推薦
無刷電機常用的位置檢測方法
stm32的foc是怎么檢測到無感無刷電機的轉子的位置的?
【好文分享】基于電感法無刷電機轉子初始位置的辨識
如何去檢測無刷電機的反電動勢?有哪些方法?
無霍爾直流無刷電機轉子位置信號如何檢測?
霍爾無刷電機中位置檢測中斷實現
直流無刷電機轉子位置傳感器特點/工作原理/分類
無刷電機位置傳感器的作用及其布局方面的注意事項
三相全波無刷電機的位置檢測
三相全波無刷電機的位置檢測
無刷電機控制基礎之有感和無感驅動、調速






 工商網監
工商網監
評論