 使用LX7720的電機驅動器:將LX7720如何集成到電機驅動系統中
使用LX7720的電機驅動器:將LX7720如何集成到電機驅動系統中
隨著空間系統開發人員不斷努力減小關鍵模塊和元件的尺寸、重量和功率,他們還需要更高性能、抗輻射和耐輻射的組件來增強系統設計。新技術 - 例如更輕,更高集成的衛星電機控制電路 - 可以承受極端空間環境并優化航天器性能。
LX7720航天器電機驅動器經過設計,經過抗輻射處理。它是空間場可編程門陣列(FPGA)的配套集成電路(IC),例如Microchip的RTG4 FPGA和RT PolarFireò FPGA,或空間微控制器(MCU),例如Microchip的SAMRH71F20或SAMV71Q21RT。LX7720 中集成了電流檢測器、旋轉變壓器、編碼器和霍爾效應編碼器接口,減少了電路板空間和重量,同時提高了使用線圈電流反饋和轉子位置傳感的閉環電機控制的可靠性。
這是LX6的電機驅動器和電流檢測電路的八部分系列文章中的第7720篇博客,從場效應晶體管(FET)驅動器和電流檢測級內的模塊理論開始,然后是如何選擇外部元件,最后是無刷直流、雙極和單極步進電機的實際實現。本系列的主題包括:
1. 介紹半橋驅動器,并討論用于為每個高邊N溝道場效應晶體管(NFET)產生獨立柵極電源的電荷泵方法
2. 使用標準柵極電壓和低柵極電壓NFET的實用半橋驅動器級
3. 電機繞組電流檢測放大器簡介
4. 在半橋級內應用電流檢測放大器的拓撲選擇
5. 將半橋分離為獨立的低邊和高邊驅動器
6. 將 LX7720 連接到無刷直流電機 (BLDC) 或永磁同步電機 (PMSM),帶可選的電磁制動器
7. 將LX7720連接到雙極步進電機
8. 將LX7720連接到一個或兩個單極步進電機
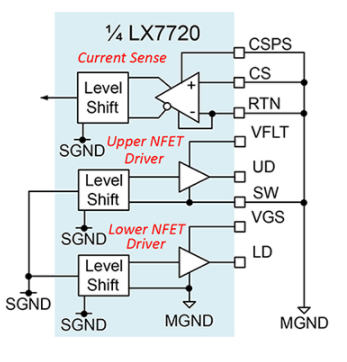
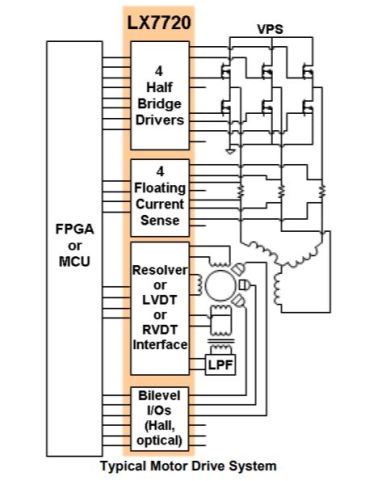
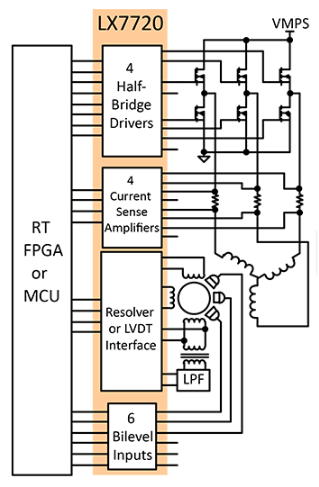
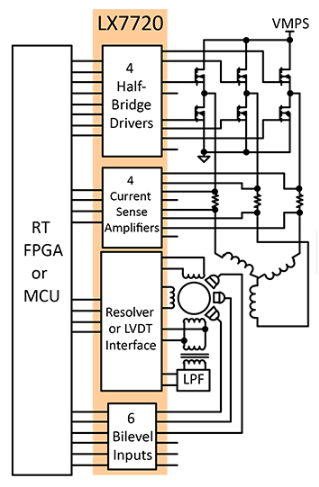
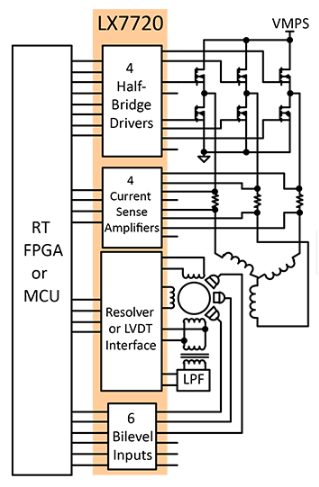
LX7720包含1個帶浮動電流檢測的半橋驅動器,用于電機線圈驅動,7720個用于檢測霍爾效應傳感器和旋轉編碼器的雙電平輸入(比較器),以及一個完整的旋變器/LVDT接口,帶初級線圈驅動器和次級信號調理。圖<>顯示了使用LX<>的典型電機驅動系統的頂層框圖,并說明了在一個IC中集成閉環電機驅動器的所有混合信號電子器件的好處。
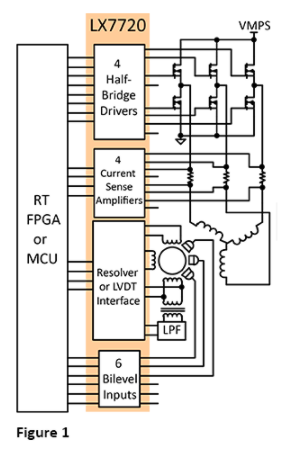
圖1.使用LX7720的典型電機驅動系統
之前的博客討論了LX7720半橋級和集成電流檢測的基本原理。本博客討論將LX7720與無刷直流電機配合使用。
LX7720包含四個半橋驅動器級和四個電流檢測放大器,足以驅動三相PMSM或無刷直流電機(BLDC)。永磁同步電機和 BLDC 都是基于永磁體的電機,轉子上有永磁體。定子包含等間距的星形或三角形連接繞組,三個用于三相電機。永磁同步電機和 BLDC 電機設計在細節上有所不同,在驅動波形(正弦與梯形/三角形)方面也有所不同。但是,就半橋驅動器級而言,基本架構是相同的。
圖2顯示了一個通用三相電機,由三個半橋驅動器驅動,每個半橋驅動器輸出中都有電流檢測。電機顯示為星形(或星形)定子繞組類型,但與三角形定子繞組的電機的連接是相同的。
LX7720電路經過簡化,省略了電流檢測和柵極驅動部分的電源和去耦。關鍵部件是三個半橋和電流檢測。
所有三個繞組驅動器的相位輸出均具有電流檢測功能。但是,由于進入一個相位的電流必須通過其他兩個相位退出,因此只需要兩個電流檢測。第三相電流由其他兩者的總和計算得出,如果需要,可以測量以提供冗余。
半橋FET及其集成體二極管所示。與FET并聯的二極管是在半橋FET關斷時承載換向電流的必要元件。FET關斷后的電流換向在第4篇博客中討論。FET 體二極管通常由分立二極管并聯,以實現更高的開關速度和更低的壓降。電機繞組電流通過半橋 FET 和/或與 FET 并聯的換向二極管的某種組合在電機電源 VMPS 和電機接地 MGND 之間流動。
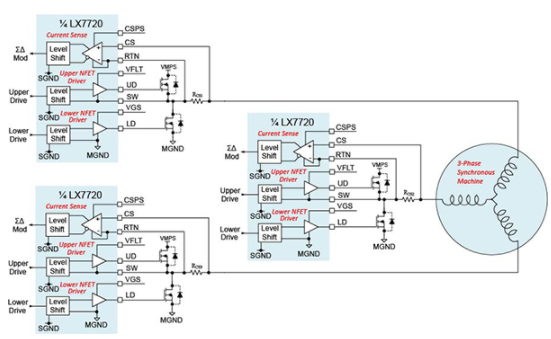
數字 2. 具有相位輸出電流檢測功能的三相電機驅動器
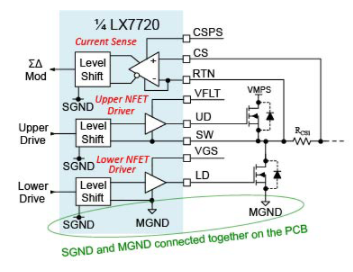
LX7720使用兩個內部接地域,如圖2所示,分別是信號地(SGND)和電機接地(MGND)。SGND用于數字和模擬信號(控制電路)。MGND用于與外部半橋相關的電路 - FET驅動器、電流檢測和電機負載本身。電平轉換器管理地面域的交叉。
如果電機控制器板設計將電機驅動電源部分(半橋和換向二極管)與 LX7720 位于同一 PCB 上,則 SGND 和 MGND 兩個接地應直接在 PCB 上連接在一起,因此將具有相同的電位(圖 3)。
數字 3. 連接LX7720的兩個接地域,SGND和MGND
對于高功率電機設計,不在控制器PCB上布線VMPS高電壓和/或高電流路徑可能更實用。在這種情況下,電源開關元件將位于單獨的模塊或 PCB 上,通常靠近電機(圖 4)。在這種分離式架構下,電機電源VMPS及其相關的接地回路PGND通過線束采用單獨的路徑連接到半橋FET。
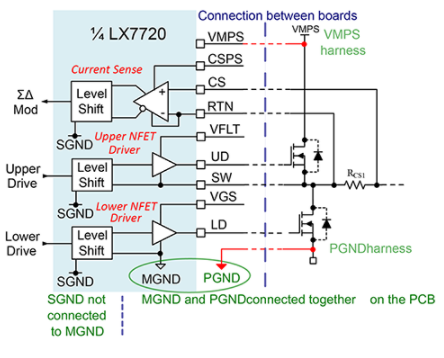
數字 4. 與分離電機接地的連接
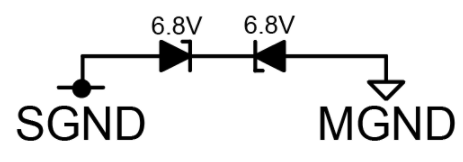
LX7720仍然需要連接到電機電源VMPS,因為這是第一篇博客中討論的高端FET驅動器的參考。LX1還可以進入半橋驅動器的地面。這兩個信號互連在圖7720中以紅色顯示。請注意,現在SGND不直接連接到MGND,而是依賴于LX4所在的PCB外部的系統接地路徑。但是,由于電機的電源線承載大電流電機波形,因此PGND/MGND和LX7720的信號GND(SGND)之間會出現接地反彈。MGND和SGND之間的允許電位差為-7720V至+10V。如果對終端系統的分析表明在瞬變期間可能會超過此值,則SGND和MGND之間的背靠背齊納二極管對可能足以箝位這些現象(圖8)。
數字 5. 用背靠背齊納二極管箝位SGND和MGND。
同步電機也可提供三相以上。由于LX7720中的半橋和電流檢測級是獨立的,因此可以一起使用多個LX7720來控制具有四相以上電機。
對于三相電機,LX7720提供一個備用半橋級。第5篇博客討論了將半橋分離為獨立的低邊和高邊驅動器,并具有可選的電流檢測。然而,螺線管或電磁制動器等負載通常由脈寬調制(PWM)波形驅動,以調節電流,從而調節機械力。然后,可以通過監控感性負載中輸出電流的上升和下降,逐周期調整PWM時序。
當負載開關關閉時,需要一個二極管來為感性負載提供斜坡下降的路徑。圖5所示電路顯示了一個具有高端電流檢測功能的低側驅動器。所有負載電流都通過電流檢測電路,無論是在開關導通時通過FET斜坡上升,還是在開關關閉后通過二極管斜坡下降。
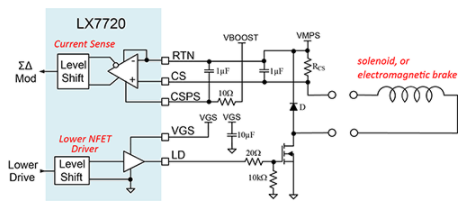
數字 6. 帶電流測量的低側感性負載驅動器
圖6所示的替代配置是具有低側電流檢測的高邊驅動器。電流檢測可以由備用ADC輸入(如果系統中可用)執行。在這種情況下,只需一個備用LX7720半橋部分即可構建兩個負載驅動器,從而為低側驅動器保留LX7720的電流檢測模塊。
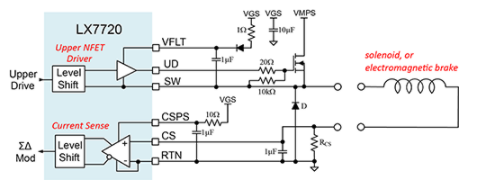
數字 7. 帶電流測量的高邊感性負載驅動器
這兩個驅動程序有兩個缺點。首先,需要兩根電線來連接負載。其次,二極管D是相對有損耗的。只需使用完整的備用半橋來驅動負載,電流檢測位于輸出端即可消除這兩個限制(圖 8)。高端FET驅動負載,低側FET用作有源二極管。如圖2所示,額外的半橋的配置方式與用于電機的其他三個半橋相同,但功率組件的細節可能存在差異。
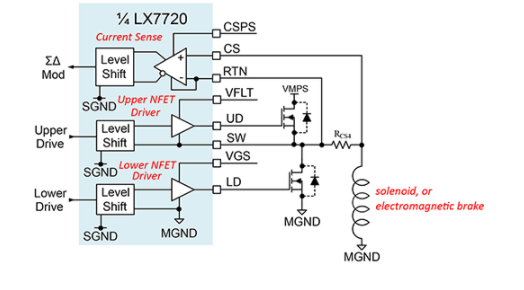
數字 8. 帶輸出電流測量的半橋感性負載驅動器
有一個警告要記住。VGS柵極驅動電源引腳和VMPS電機電源引腳是LX7720內所有四個半橋通用的。這意味著電磁閥或電磁制動器必須使用與電機相同的 VPMS 和 VGS 電源,并具有三個備用電路。
最后,圖6顯示了如何連接未使用的半橋驅動器或電流檢測放大器。
數字 6. 連接未使用的半橋驅動器和/或電流檢測
結論
您現在應該了解如何將 LX7720 連接到 BLDC 或 PMSM,以及如何使用第 4 個半橋級來驅動電磁閥或電磁制動器。
審核編輯:郭婷
-
FPGA
+關注
關注
1629文章
21729瀏覽量
603044 -
驅動器
+關注
關注
52文章
8228瀏覽量
146268 -
電機
+關注
關注
142文章
9003瀏覽量
145350
發布評論請先 登錄
相關推薦
步進電機驅動器中mosfet的驅動設計
SM7720P非隔離可控硅調光LED恒流驅動芯片
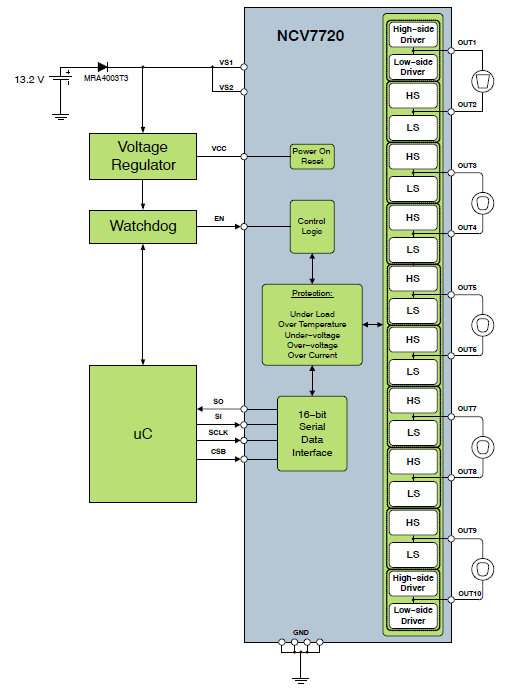
NCV7720 Deca半橋驅動器
用于空間應用的電機控制器
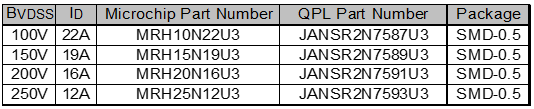
評估采用LX0航天器電機驅動器的高可靠性SMD-5.7720 MOSFET
使用LX7720的電機驅動器:將LX7720連接到雙極步進電機
使用LX7720的電機驅動器:半橋驅動器簡介
使用LX7720的電機驅動器:電機繞組電流檢測放大器簡介
NCV7720DQR2G半橋驅動IC芯片國產替代






 工商網監
工商網監
評論