


USART文件夾介紹
usart 文件夾內(nèi)包含了 usart.c 和 usart.h 兩個文件。這兩個文件用于串口的初始化和中斷接收。這里只是針對串口 1,比如你要用串口 2 或者其他的串口,只要對代碼稍作修改就可以了。
usart.c里面包含了2個函數(shù)一個是void USART1_IRQHandler(void);另外一個是void uart_init(u32 bound);里面還有一段對串口 printf 的支持代碼,如果去掉,則會導(dǎo)致 printf 無法使用,雖然軟件編譯不會報錯,但是硬件上 STM32 是無法啟動的,這段代碼不要去修改。
printf 函數(shù)
這段引入 printf 函數(shù)支持的代碼在 usart.h 頭文件的最上方,這段代碼加入之后便可以通過 printf 函數(shù)向串口發(fā)送我們需要的內(nèi)容,方便開發(fā)過程中查看代碼執(zhí)行情況以及一些變量值。這 段代碼不需要修改,引入到 usart.h 即可。
這段代碼為:
//
//加入以下代碼,支持printf函數(shù),而不需要選擇use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//標(biāo)準(zhǔn)庫需要的支持函數(shù)
struct __FILE
{
int handle;
};
FILE __stdout;
//定義_sys_exit()以避免使用半主機(jī)模式
_sys_exit(int x)
{
x = x;
}
//重定義fputc函數(shù)
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循環(huán)發(fā)送,直到發(fā)送完畢
USART1->DR = (u8) ch;
return ch;
}
#endif
uart_init函數(shù)
串口設(shè)置的一般步驟可以總結(jié)為如下幾個步驟:
- 串口時鐘使能,GPIO 時鐘使能
2. 串口復(fù)位
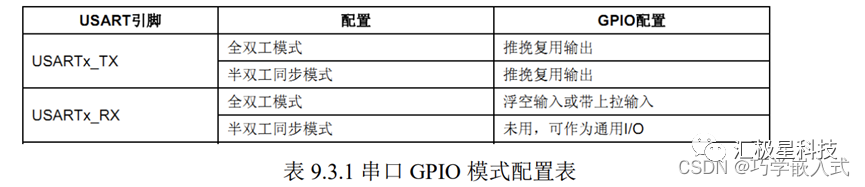
2. GPIO 端口模式設(shè)置
2. 串口參數(shù)初始化
2. 開啟中斷并且初始化 NVIC(如果需要開啟中斷才需要這個步驟)
2. 使能串口
2. 編寫中斷處理函數(shù)
下面,我們就簡單介紹下這幾個與串口基本配置直接相關(guān)的幾個固件庫函數(shù)。
這些函數(shù)和定義主要分布在 stm32f10x_usart.h 和 stm32f10x_usart.c 文件中。
1.串口時鐘使能。
串口是掛載在 APB2 下面的外設(shè),所以使能函數(shù)為:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1);
2.串口復(fù)位。
當(dāng)外設(shè)出現(xiàn)異常的時候可以通過復(fù)位設(shè)置,實現(xiàn)該外設(shè)的復(fù)位,然后重新配置這個外設(shè)達(dá)到讓其重新工作的目的。一般在系統(tǒng)剛開始配置外設(shè)的時候,都會先執(zhí)行復(fù)位該外設(shè)的操作。
復(fù)位的是在函數(shù) USART_DeInit()中完成:
void USART_DeInit(USART_TypeDef* USARTx);//串口復(fù)位
比如我們要復(fù)位串口 1,方法為:
USART_DeInit(USART1); //復(fù)位串口 1
3.串口參數(shù)初始化。
串口初始化是通過 USART_Init()函數(shù)實現(xiàn)的:
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
這個函數(shù)的第一個入口參數(shù)是指定初始化的串口標(biāo)號,這里選擇 USART1。
第二個入口參數(shù)是一個 USART_InitTypeDef 類型的結(jié)構(gòu)體指針,這個結(jié)構(gòu)體指針的成員變量用來設(shè)置串口的一些參數(shù)。一般的實現(xiàn)格式為:
USART_InitStructure.USART_BaudRate = bound; //波特率設(shè)置;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為 8 位數(shù)據(jù)格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//無硬件數(shù)據(jù)流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發(fā)模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
從上面的初始化格式可以看出初始化需要設(shè)置的參數(shù)為:波特率,字長,停止位,奇偶校驗位,硬件數(shù)據(jù)流控制,模式(收,發(fā))。我們可以根據(jù)需要設(shè)置這些參數(shù)。
4.數(shù)據(jù)發(fā)送與接收。
STM32 的發(fā)送與接收是通過數(shù)據(jù)寄存器 USART_DR 來實現(xiàn)的,這是一個雙寄存器,包含了 TDR 和 RDR。當(dāng)向該寄存器寫數(shù)據(jù)的時候,串口就會自動發(fā)送,當(dāng)收到數(shù)據(jù)的時候,也是存在該寄存器內(nèi)。
STM32 庫函數(shù)操作 USART_DR 寄存器發(fā)送數(shù)據(jù)的函數(shù)是:
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
通過該函數(shù)向串口寄存器 USART_DR 寫入一個數(shù)據(jù)。
STM32 庫函數(shù)操作 USART_DR 寄存器讀取串口接收到的數(shù)據(jù)的函數(shù)是:
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
通過該函數(shù)可以讀取串口接受到的數(shù)據(jù)。
5.串口狀態(tài)。
串口的狀態(tài)可以通過狀態(tài)寄存器 USART_SR 讀取。USART_SR 的各位描述如下圖所示。
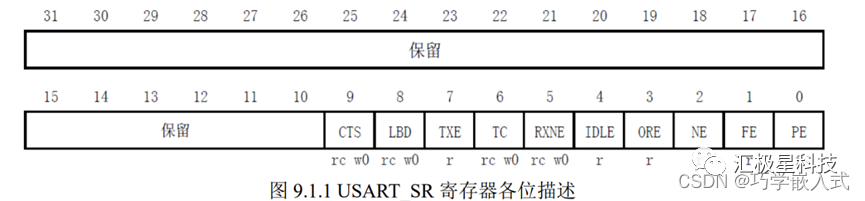
RXNE(讀數(shù)據(jù)寄存器非空),當(dāng)該位被置 1 的時候,就是提示已經(jīng)有數(shù)據(jù)被接收到了,并且可以讀出來了。這時候我們要做的就是盡快去讀取 USART_DR,通過讀 USART_DR 可以將該位清零,也可以向該位寫 0,直接清除。
TC(發(fā)送完成),當(dāng)該位被置位的時候,表示 USART_DR 內(nèi)的數(shù)據(jù)已經(jīng)被發(fā)送完成了。如果設(shè)置了這個位的中斷,則會產(chǎn)生中斷。該位也有兩種清零方式:
1)讀 USART_SR,寫USART_DR。
2)直接向該位寫 0。
在我們固件庫函數(shù)里面,讀取串口狀態(tài)的函數(shù)是:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
這個函數(shù)的第二個入口參數(shù)非常關(guān)鍵,它是標(biāo)示我們要查看串口的哪種狀態(tài),比如上面講解的RXNE(讀數(shù)據(jù)寄存器非空)以及 TC(發(fā)送完成)。例如:
我們要判斷讀寄存器是否非空(RXNE),操作庫函數(shù)的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_RXNE);
我們要判斷發(fā)送是否完成(TC),操作庫函數(shù)的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_TC);
這些標(biāo)識號在 MDK 里面是通過宏定義定義的:
#define USART_IT_PE ((uint16_t)0x0028)
#define USART_IT_TXE ((uint16_t)0x0727)
#define USART_IT_TC ((uint16_t)0x0626)
#define USART_IT_RXNE ((uint16_t)0x0525)
#define USART_IT_IDLE ((uint16_t)0x0424)
#define USART_IT_LBD ((uint16_t)0x0846)
#define USART_IT_CTS ((uint16_t)0x096A)
#define USART_IT_ERR ((uint16_t)0x0060)
#define USART_IT_ORE ((uint16_t)0x0360)
#define USART_IT_NE ((uint16_t)0x0260)
#define USART_IT_FE ((uint16_t)0x0160)
6.串口使能。
串口使能是通過函數(shù) USART_Cmd()來實現(xiàn)的,這個很容易理解,使用方法是:
USART_Cmd(USART1, ENABLE); //使能串口
7.開啟串口響應(yīng)中斷。
有些時候當(dāng)我們還需要開啟串口中斷,那么我們還需要使能串口中斷,使能串口中斷的函數(shù)是:
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState)
這個函數(shù)的第二個入口參數(shù)是標(biāo)示使能串口的類型,也就是使能哪種中斷,因為串口的中斷類型有很多種。比如在接收到數(shù)據(jù)的時候(RXNE 讀數(shù)據(jù)寄存器非空),我們要產(chǎn)生中斷,那么我們開啟中斷的方法是:
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟中斷,接收到數(shù)據(jù)中斷
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟中斷,接收到數(shù)據(jù)中斷
USART_ITConfig(USART1,USART_IT_TC,ENABLE);
8.獲取相應(yīng)中斷狀態(tài)。
當(dāng)我們使能了某個中斷的時候,當(dāng)該中斷發(fā)生了,就會設(shè)置狀態(tài)寄存器中的某個標(biāo)志位。經(jīng)常我們在中斷處理函數(shù)中,要判斷該中斷是哪種中斷,使用的函數(shù)是:
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT)
比如我們使能了串口發(fā)送完成中斷,那么當(dāng)中斷發(fā)生了, 我們便可以在中斷處理函數(shù)中調(diào)用這個函數(shù)來判斷到底是否是串口發(fā)送完成中斷,方法是:
USART_GetITStatus(USART1, USART_IT_TC)
返回值是 SET,說明是串口發(fā)送完成中斷發(fā)生。
串口實驗設(shè)計
硬件設(shè)計
本實驗需要用到的硬件資源有:
1) 串口 1
串口 1 之前還沒有介紹過,本實驗用到的串口 1 與 USB 串口并沒有在 PCB 上連接在一起,需要通過跳線帽來連接一下。這里我們把 P6 的 RXD 和 TXD 用跳線帽與 PA9 和 PA10 連接起來。
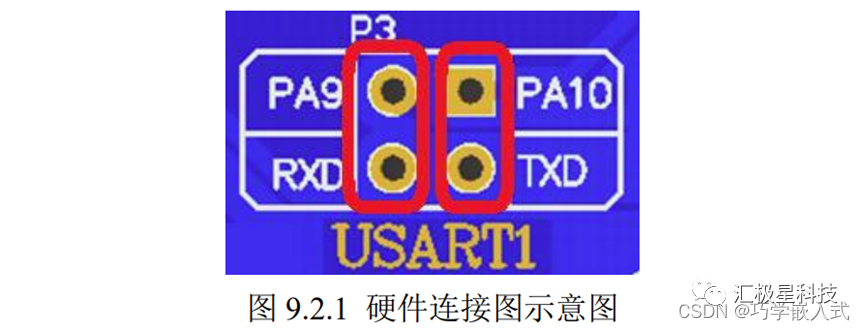
連接上這里之后,我們在硬件上就設(shè)置完成了,可以開始軟件設(shè)計了。
-
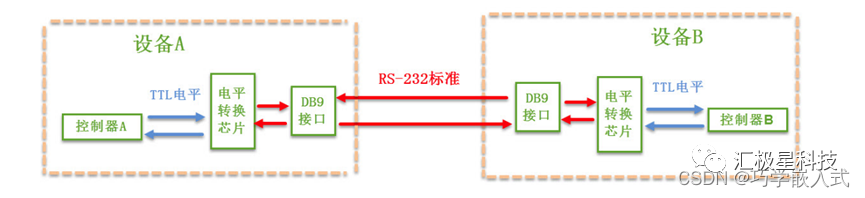
物理層
+關(guān)注
關(guān)注
1文章
155瀏覽量
35083 -
串口通訊
+關(guān)注
關(guān)注
1文章
265瀏覽量
25576 -
通訊協(xié)議
+關(guān)注
關(guān)注
10文章
289瀏覽量
20871 -
串行通訊
+關(guān)注
關(guān)注
2文章
79瀏覽量
16658
發(fā)布評論請先 登錄
串口通訊基本知識簡介
串口通信Serial簡介
串口通訊協(xié)議與RS-232標(biāo)準(zhǔn)簡介
串口通訊與串口通信協(xié)議簡介
Serial Communication (COM) Dev
Proteus在MCS&ARM中的應(yīng)用之Serial_Communication
Crazyflie 2.0學(xué)習(xí)周報16-3: 串口通訊詳解及LPS node的USB通信

STM32的串口通訊協(xié)議
串口通訊(Serial Communication) 簡介1
串口通訊(Serial Communication) 簡介2

串口通訊(Serial Communication) 簡介4





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論