") 實(shí)現(xiàn)自動(dòng)駕駛需要我們重新思考人車交互
實(shí)現(xiàn)自動(dòng)駕駛需要我們重新思考人車交互
完全自動(dòng)駕駛時(shí)代即將來臨一一但在自動(dòng)駕駛系統(tǒng)能夠處理各種態(tài)勢(shì)、各種環(huán)境和各種狀況之前,實(shí)現(xiàn)自動(dòng)駕駛的進(jìn)程將仍處于“進(jìn)行時(shí)”,人類干預(yù)對(duì)于駕駛而言仍將不可或缺。
隨著自動(dòng)駕駛開發(fā)的進(jìn)展,各種各樣的挑戰(zhàn)會(huì)不斷涌現(xiàn)。當(dāng)前,許多 OEM 正轉(zhuǎn)而開始部署 L2+級(jí)或 L3 級(jí)自動(dòng)駕駛功能,允許駕駛員在一段時(shí)間內(nèi)不必干預(yù)某些駕駛?cè)蝿?wù),從而實(shí)現(xiàn)車輛性能和可負(fù)擔(dān)性之間的平衡。與這一優(yōu)點(diǎn)相對(duì)的是,系統(tǒng)有時(shí)會(huì)要求人類重新干預(yù)并接管車輛駕駛。
在這種自動(dòng)駕駛水平下,確保駕駛員和自動(dòng)駕駛系統(tǒng)之間的無縫交接是我們的目標(biāo)。因此,行業(yè)需要一種與駕駛員進(jìn)行交互的智能新系統(tǒng)一一它能夠構(gòu)建車內(nèi)外環(huán)境模型以及駕駛員狀態(tài)模型并將兩者相結(jié)合,保證駕駛員能夠順利接管車輛控制權(quán)。
準(zhǔn)備好了嗎 ?
設(shè)想一下:你正在越野旅行途中,車子正沿著蜿蜒向前的高速公路穿越廣袤無垠的大草原。你十幾歲的兒子正在開車,而你則任由思緒漫游,也許觀賞著周圍的美景,或者暢想著即將到來的探險(xiǎn)之旅;抑或,你悠閑地翻著一本書,在手機(jī)上瀏覽著社交媒體上的信息,或者只是打個(gè)盹。
突然,你兒子催著你趕緊接過方向盤,因?yàn)槌霈F(xiàn)了他不知道如何應(yīng)對(duì)的情況。而你此時(shí)的思緒還在別處,卻需要立即掌握情況: 我們此刻在哪?在哪條車道上? 周圍有哪些車輛? 出現(xiàn)了什么險(xiǎn)情和緊急情況? 有哪些相關(guān)的交通標(biāo)志?
當(dāng)然,在繁忙的高速路上更換司機(jī)是不現(xiàn)實(shí)的,但這個(gè)例子足以說明某些級(jí)別的自動(dòng)駕駛所面對(duì)的挑戰(zhàn)。隨著 L3 級(jí)自動(dòng)駕駛的開發(fā),人們可以期待在某些情況下將駕駛完全交給汽車。但這也意味著自動(dòng)駕駛系統(tǒng)有的時(shí)候需要駕駛員全身心地關(guān)注駕駛情況并隨時(shí)準(zhǔn)備好接管車輛。
當(dāng)前的系統(tǒng)可能會(huì)通過發(fā)出警告或預(yù)估駕駛員接管控制權(quán)所需的時(shí)間,以解決移交控制權(quán)方面的問題。但是,駕駛員接管所需的時(shí)間以及執(zhí)行接管的情況會(huì)受到引發(fā)控制權(quán)轉(zhuǎn)移的多重因素的影響。駕駛員是否正沉迷于其它活動(dòng)的程度.駕駛員是否正處于分心狀態(tài)、駕駛情況有多復(fù)雜等等因素。

工程師們必須想方設(shè)法幫助人類駕駛員準(zhǔn)備好有效且快速地控制車輛。在人機(jī)配合的駕駛中,系統(tǒng)必須實(shí)時(shí)了解其人類伙伴的狀態(tài)一了解駕駛員的認(rèn)知狀態(tài)、行為和意圖——并為駕駛員創(chuàng)建個(gè)性化檔案,以實(shí)現(xiàn)自動(dòng)駕駛的安全操作。
通向理解的橋梁
慶幸的是,今天,汽車行業(yè)正致力于開發(fā)各類工具,為車輛賦子充分的智能,讓它們不僅可以了解駕駛員當(dāng)前的身體狀態(tài),還可以了解與駕駛員互動(dòng)的最佳方式,從而順利地移交控制權(quán)。結(jié)合對(duì)車輛周圍環(huán)境的了解,這可以讓自動(dòng)駕駛系統(tǒng)主動(dòng)調(diào)整車輛界面,方便駕駛員做出決策。
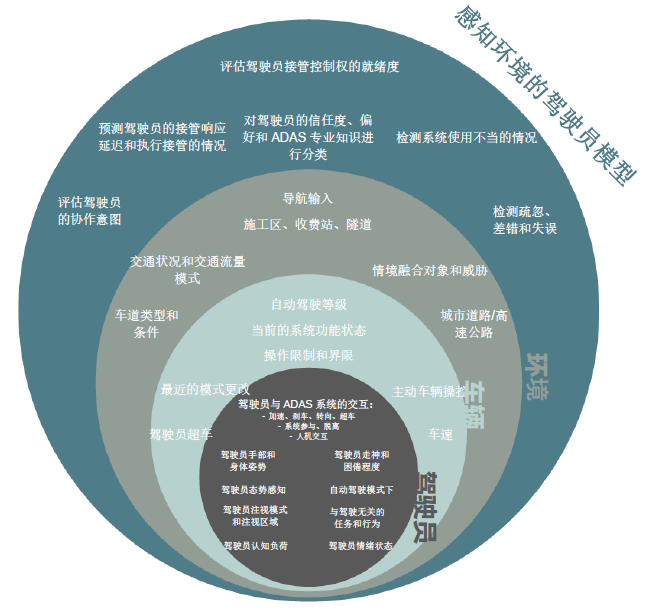
環(huán)境模型
真正實(shí)現(xiàn)這一暢想的關(guān)鍵在于監(jiān)控車輛周圍的環(huán)境。高級(jí)駕駛員輔助系統(tǒng)(ADAS) 會(huì)將諸多環(huán)境因素考慮其中,如天氣、交通狀況、當(dāng)日時(shí)間以及車輛是在高速公路上還是在城市環(huán)境中行駛。
隨著車輛的更新?lián)Q代,傳感器(雷達(dá)、攝像頭、激光雷達(dá)和超聲波傳感器等)也越來越多;同時(shí)無線獲取地圖、交通狀況和天氣數(shù)據(jù)等功能也日益普及。借助傳感器融合技術(shù),系統(tǒng)已經(jīng)可以建立一個(gè)優(yōu)秀的環(huán)境模型,反映車輛周圍的情況并評(píng)估具有威脅的情況。
但是,將車輛的環(huán)境模型與人類的模型相匹配是一大挑戰(zhàn),因?yàn)槿祟愑歇?dú)立的感官以及系統(tǒng)和環(huán)境心理模型。
人類和機(jī)器人可以默契配合
汽車領(lǐng)域并非是第一個(gè)開展自動(dòng)化系統(tǒng)與人類合作的行業(yè)。航空、國防和太空探案都是在該方面具有代表性的領(lǐng)域。這些領(lǐng)域都要求:
安全文化
在不利的、動(dòng)態(tài)的和不確定的條件下,彈性化的人機(jī)協(xié)調(diào)
不同人員和機(jī)器之間的不固定的任務(wù)交接
有關(guān)自動(dòng)化系統(tǒng)功能的用戶教育和培訓(xùn)
這些領(lǐng)域還都采取了團(tuán)隊(duì)框架,其中包含監(jiān)督角色,并輔以共同的團(tuán)隊(duì)協(xié)調(diào)和輔助目標(biāo)。隨著自動(dòng)駕駛的出現(xiàn),來自這些領(lǐng)域的經(jīng)驗(yàn)教訓(xùn)將得到用武之地。
駕駛員模型
實(shí)現(xiàn)人機(jī)默契配合的一條途徑是讓系統(tǒng)創(chuàng)建駕駛員模型,利用駕駛員監(jiān)測(cè)系統(tǒng),通過攝像頭判斷駕駛員是否注意力集中、走神或昏昏欲睡。
傳統(tǒng)的系統(tǒng)采用基于規(guī)則的方案或假設(shè)駕駛員行為是靜態(tài)的,但在監(jiān)控面部表情和認(rèn)知能力等多種變量時(shí),可能會(huì)出現(xiàn)更多的情況。
比如,系統(tǒng)有時(shí)會(huì)不管駕駛員是否打算改變車道或當(dāng)時(shí)駕駛員的專注度照樣發(fā)出車道偏離警告。與之相比,更先進(jìn)的艙內(nèi)傳感系統(tǒng)可以實(shí)時(shí)觀察駕駛員,并創(chuàng)建模型,展示駕駛員在不同狀態(tài)和不同駕駛條件下的表現(xiàn)或行為。
隨著駕駛員開始體驗(yàn) L2 級(jí)及以上自動(dòng)駕駛的功能,如自動(dòng)變道輔助,他們會(huì)逐漸了解系統(tǒng)會(huì)如何應(yīng)對(duì)不穩(wěn)定的交通流量、不斷變化的交通密度、匯入車流等多種交通場(chǎng)景。最初的探索階段對(duì)于系統(tǒng)贏得消費(fèi)者的總體信任度和技術(shù)接受度十分關(guān)鍵,在這一階段,駕駛員會(huì)去了解系統(tǒng)的各項(xiàng)功能。駕駛員會(huì)對(duì)系統(tǒng)的運(yùn)行建立心理模型,并判斷系統(tǒng)的行為是保守的還是激進(jìn)的、令人煩擾的還是合理的。
在此期間,駕駛員模型也可以實(shí)時(shí)了解駕駛員的情況。在上面的例子中,駕駛員模型可以在自動(dòng)換道之前、期間和之后對(duì)駕駛員對(duì)系統(tǒng)的反應(yīng)和交互進(jìn)行分類。
借助駕駛員模型,系統(tǒng)可以更加全面地了解駕駛員的情況。它將借鑒交互歷史判斷駕駛員是傾向于過度信任自動(dòng)駕駛系統(tǒng),還是不夠信任自動(dòng)駕駛系統(tǒng)。無論駕駛員參與駕駛操作與否,它都能找到相應(yīng)模式,并推斷出隨后與該駕駛員交互的最佳方式。比如,系統(tǒng)可以觀察駕駛員是更喜歡接收信息,了解車輛當(dāng)前操作及采取此種操作的原因,還是不喜歡被打擾。
情境輔助
配備環(huán)境模型和駕駛員模型后,自動(dòng)駕駛系統(tǒng)就能夠更有效地了解駕駛員駕駛車輛需要哪些幫助。比如,系統(tǒng)可以對(duì)駕駛員的查詢進(jìn)行語義分析,并借助機(jī)器學(xué)習(xí)強(qiáng)化分析,更好地關(guān)聯(lián)相關(guān)概念和情境。自動(dòng)駕駛系統(tǒng)應(yīng)具備情境輔助功能其唯一的功能就是預(yù)測(cè)駕駛員的需求,并在他們需要時(shí)以最適合他們的形式提供他們需要的信息。
情境輔助功能可以預(yù)測(cè)為駕駛員提供幫助的方式和時(shí)間。比如,感知到駕駛員有疑惑后,車輛可以主動(dòng)提供信息,幫助建立信任,就像人類駕駛員對(duì)乘客那樣。
駕駛員模型可以通過兩種方式提供幫助:
定制人機(jī)界面,使交互符合駕駛員模式。這在出現(xiàn)不確定情況時(shí)尤其重要,如不利的駕駛條件。比如,變道時(shí),系統(tǒng)可以通知駕駛員有關(guān)車道風(fēng)險(xiǎn)預(yù)測(cè)的變化,并根據(jù)周圍交通流量的復(fù)雜度發(fā)出預(yù)警一這些都有助于建立駕駛員對(duì)系統(tǒng)的信任。
根據(jù)每位駕駛員不同的駕駛特征調(diào)整ADAS 響應(yīng)。還是以變道為例,可以根據(jù)每位駕駛員的舒適度對(duì)速度、確信度和可接受的車輛間距等變量進(jìn)行個(gè)性化設(shè)置。
此外,駕駛員模型和情境輔助還有助于減少人為失誤。比如,如果駕駛員在高速公路上突然停用 L3 級(jí)自動(dòng)駕駛功能,系統(tǒng)可以考慮相關(guān)情境,觀察駕駛員對(duì)開關(guān)的反應(yīng),確定駕駛員是否意外關(guān)閉了開關(guān)。這種情況極其危險(xiǎn),因?yàn)轳{駛員沒有意識(shí)到自動(dòng)駕駛已經(jīng)被關(guān)閉或沒有準(zhǔn)備好重新控制車輛。針對(duì)這種情況,系統(tǒng)可以通過設(shè)計(jì)在過渡期間暫時(shí)啟用控制輔助,為駕駛員提供協(xié)助。
安波福目前正與多家 OEM 展開合作,針對(duì)特定駕駛場(chǎng)景的情境,進(jìn)行駕駛員建模和注意力標(biāo)準(zhǔn)管理的開發(fā)。
駕駛交接
讓駕駛員迅速從放松狀態(tài)進(jìn)入活躍和警覺狀態(tài)是實(shí)現(xiàn)車輛控制權(quán)交接的一大挑戰(zhàn)。設(shè)想一下在出現(xiàn)交通堵塞時(shí),駕駛員可能手里正拿著東西(喝咖啡、查看電子郵件) 或者正處于不適于駕駛的狀態(tài)(向后傾斜或伸長脖子)。
此時(shí)環(huán)境模型的態(tài)勢(shì)和威脅評(píng)估以及駕駛員模型將發(fā)揮作用。借助環(huán)境模型,系統(tǒng)能夠知道哪些要素需要多加注意,而哪些不需要。比如,駕駛員可能會(huì)立即注意到附近的兩輛大卡車,而其實(shí)此時(shí)駛?cè)肭懊孳嚨赖男∞I車更值得駕駛員關(guān)注。系統(tǒng)可以借助駕駛員模型有效地突出這兩小轎車的存在,如在平視顯示器上車輛周圍放置視覺標(biāo)記,使用信息娛樂系統(tǒng)上的信息或通過音頻提醒駕駛員。
情境感知系統(tǒng)的優(yōu)勢(shì)
情境感知系統(tǒng)可以通過以下方式在決策過程中協(xié)助駕駛員:
全面評(píng)估情況,將駕駛員狀態(tài)、道路狀況和 ADAS 狀態(tài)考慮其中
考慮到駕駛員的舒適度、技能和處理當(dāng)前信息的能力,以最具安全性的方式協(xié)助駕駛員
探索合作式交互是確保順利交接的新興方案,駕駛員和車輛將共同處理操作和不確定性。主動(dòng)安全系統(tǒng)可能不確定在某些環(huán)境或交通條件下需要進(jìn)行什么操作。在行駛中的某些階段,車輛可以與駕駛員達(dá)成“照管協(xié)議”,通知駕駛員即將發(fā)生的不確定性——如施工區(qū)帶來的不確定性——并評(píng)估駕駛員的合作意圖。駕駛員會(huì)主動(dòng)確認(rèn)進(jìn)行合作,然后密切關(guān)注系統(tǒng)在施工區(qū)附近車道上的操作。這種密切合作的方式使人和機(jī)器成為一個(gè)團(tuán)隊(duì),可以提高安全性。
從起點(diǎn)到終點(diǎn)
自動(dòng)駕駛系統(tǒng)與駕駛員之間的交互方案可能會(huì)與核電站技術(shù)員與自動(dòng)系統(tǒng)、或者飛機(jī)駕駛員與自動(dòng)駕駛系統(tǒng)之間的交互方案類似。
核電站和飛機(jī)也是安全至上的系統(tǒng),但操作員并非始終掌握控制權(quán)。相反,他們經(jīng)過培訓(xùn),能夠了解系統(tǒng)關(guān)鍵方面的狀態(tài)并留意異常情況或威脅。
事實(shí)證明,人類擅長發(fā)現(xiàn)異常并進(jìn)行分類或概括,而計(jì)算機(jī)更擅長查看大量數(shù)據(jù)、解析數(shù)據(jù)并同時(shí)執(zhí)行多種復(fù)雜操作。得力的情境助手可以匹配人類的思維方式一處理數(shù)據(jù)并就異常情況提醒駕駛員。此外,情境助手還將有助于訓(xùn)練駕駛員與車輛配合,使他們成為出色的 ADAS 操作員。
開發(fā)人員不能忽視人類駕駛員對(duì)于 L2 級(jí)和 L3級(jí)自動(dòng)駕駛車輛操作仍必不可少這一事實(shí),因此應(yīng)通過系統(tǒng)設(shè)計(jì),為駕駛員提供安全操作車輛所需的支持。學(xué)習(xí)的方式和與系統(tǒng)交五的方式因人而異,這意味著一刀切的模式化方案不可能總是可行。
構(gòu)建成熟的駕駛員和環(huán)境模型對(duì)于在駕駛員和車輛間建立安全、協(xié)作的關(guān)系至關(guān)重要當(dāng)駕駛員看到系統(tǒng)真正理解他們以及車輛周圍發(fā)生的事情時(shí),他們更有可能會(huì)選擇信任并使用系統(tǒng)。

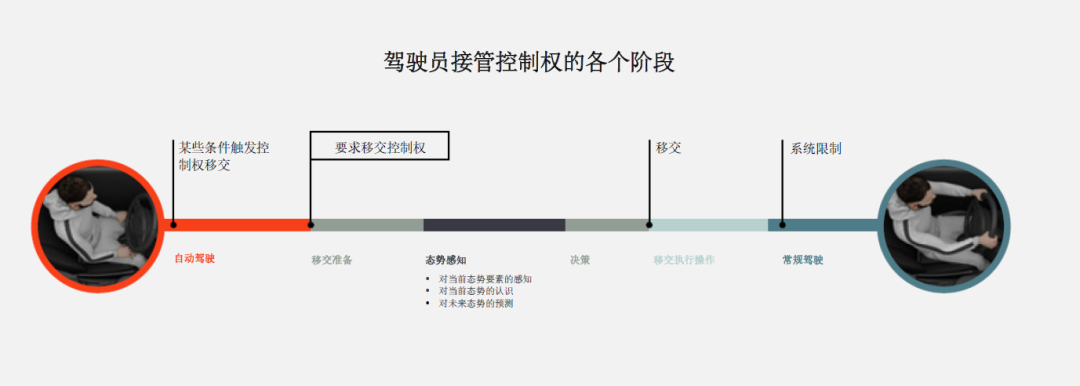
讓駕駛員為接管控制權(quán)做好準(zhǔn)備
駕駛員是否清楚周圍環(huán)境(車輛、交通和道路狀況)對(duì)于確保安全移交控制權(quán)十分關(guān)鍵。安波福開發(fā)了一款針對(duì)駕駛員的初級(jí)態(tài)勢(shì)感知評(píng)估模型,可以判斷駕駛員的注視的對(duì)象并評(píng)估駕駛員視線與周圍車輛和整個(gè)環(huán)境的相關(guān)性。
該模型將環(huán)境感測(cè)和駕駛員感測(cè)數(shù)據(jù)相結(jié)合,可以推斷駕駛員在試圖重新接管控制權(quán)時(shí)的態(tài)勢(shì)感知水平。如果駕駛員在準(zhǔn)備接管時(shí)表現(xiàn)出較低的態(tài)勢(shì)感知能力,車輛會(huì)提示他們將視線轉(zhuǎn)向給定方向以重新定向一一還可以突出顯示具有潛在威脅的特定物體。
審核編輯 :李倩
-
模型
+關(guān)注
關(guān)注
1文章
3254瀏覽量
48878 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3981瀏覽量
190011 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13838瀏覽量
166529
原文標(biāo)題:實(shí)現(xiàn)自動(dòng)駕駛需要我們重新思考人車交互
文章出處:【微信號(hào):wiring-world,微信公眾號(hào):線束世界】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
自動(dòng)駕駛汽車安全嗎?

智能駕駛與自動(dòng)駕駛的關(guān)系

自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
揭秘自動(dòng)駕駛:未來汽車的感官革命,究竟需要哪些超級(jí)傳感器?
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
自動(dòng)駕駛已成現(xiàn)實(shí)?賽思時(shí)間同步服務(wù)器賦能北京市高級(jí)別自動(dòng)駕駛示范區(qū),為自動(dòng)駕駛提供中國方案

文遠(yuǎn)知行與聯(lián)想車計(jì)算戰(zhàn)略合作,推進(jìn)自動(dòng)駕駛商業(yè)化落地
蘑菇車聯(lián)獲天津(西青)國家級(jí)車聯(lián)網(wǎng)先導(dǎo)區(qū)首張自動(dòng)駕駛測(cè)試牌照

自動(dòng)駕駛發(fā)展問題及解決方案淺析
基于實(shí)車在環(huán)(ViL)的自動(dòng)駕駛功能一致性評(píng)估






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論