 功能塊MCA_CamInDirect的電子凸輪功能
功能塊MCA_CamInDirect的電子凸輪功能
1_回顧及簡介
從本節開始,將持續介紹基于功能塊MCA_CamInDirect的電子凸輪功能。
前面曾介紹過MCA_GearInDirect,MCA_CamInDirect與之特點近似,也是個急性子。執行MCA_CamInDirect時,首先讀取主軸的當前位置,根據主從軸R&A的設置,計算出與主軸當前位置耦合的從軸當前位置,即刻出發,奔赴應許之地。
啟程出發的方向也有所設置。在MCA_CamInDirect的輸入參數中,有一個Direction,也有一個Sync Window。當從軸當前位置與從軸的應許之地的位置差值超過Sync Window時,按Direction設定的方向啟程運動。反之,當小于Sync Window時,按運行距離最短的方向奔向應許之地。
即便主軸未啟動,從軸也會馬上執行。因此,無論Gear還是Cam,凡是帶Direct的功能塊,都是急性子。
2_具體操作介紹
1.程序介紹
在act_Cam中添加MCA_CamInDirect. 其Master/Slave/CamTableID與MC_CamIn的設置相同。其它參數不用設置,可以在VISU上操作。
在MC_CamIn的輸入有參數MasterSyncPosition & MasterStartDistance。而在MCA_CamInDirect中,則替換之以SyncWindow和SyncDirection等。
添加了功能塊:MCA_CamGetInterpolationPosition。針對選用的Cam表,每給定一個輸入Master_Position,即可得到與之相對應的從軸位置:Interpolation_Point。
VISU中,添加MCA_CamInDirect的VISU,及與主軸位置相對應的Interpolation_Point。
2.測試MCA_CamGetInterpolationPosition
給主軸設定不同的數值,測試與之對應的Interpolation_Point
3.主從軸RR模式下的運行測試
主軸和從軸都設置為Relative。無論啟動時主從軸的當前位置,當執行MCA_CamInDirect時,InSync馬上變為TRUE。狀態機馬上變為:Synchronized Motion。此時,主軸啟動時,從軸即刻跟隨啟動。
當主從軸均為RR時,其運行與MC_CamIn時完全相同。
-
工業控制
+關注
關注
38文章
1457瀏覽量
85864 -
主軸
+關注
關注
0文章
375瀏覽量
4346
發布評論請先 登錄
相關推薦
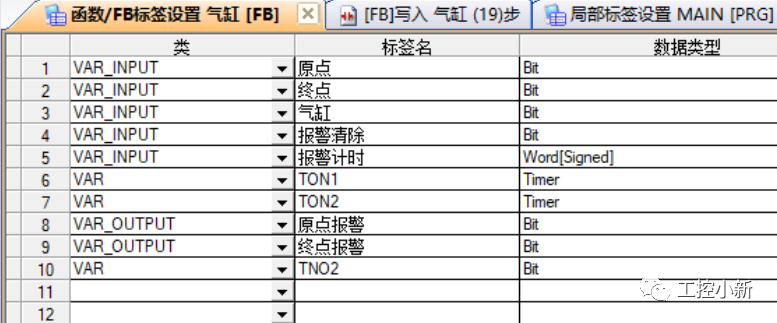
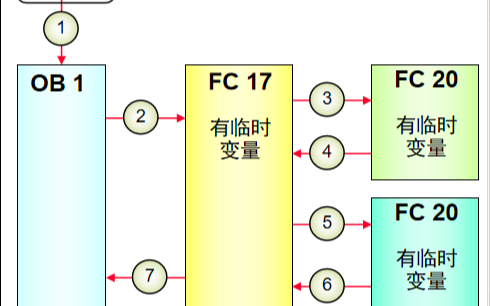
什么是FB功能塊?為什么要使用FB功能塊?如何制作一個FB功能塊?
基于FF現場總線的先進PID功能塊設計
基于EPA的PID功能塊的設計及實現
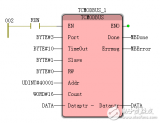
騰控MODBUS主站功能塊通迅詳解





 工商網監
工商網監
評論