 在ROS學習平臺中常常使用到的直流電機控制原理與驅動電路
在ROS學習平臺中常常使用到的直流電機控制原理與驅動電路
在使用ROS機器人構建地圖的過程中,需要在房間內自主運行,采集地圖信息。這個過程中需要控制電機的正反轉,電機的轉速,以適應機器人直行,轉彎等動作。
正反轉控制原理
有刷電機的正反轉非常簡單,只需要交換電機供電線正負極,便可以實現電機正反轉控制。在自動控制系統中,我們不可能手動去不停交換電機正負極供電順序,需要使用程序配合硬件電路去實現。
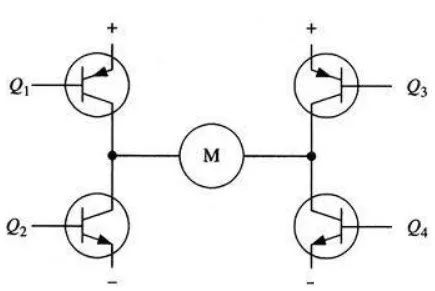
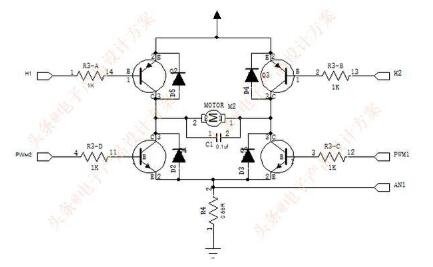
如下圖所示,使用4個功率管(可以為MOS管或者IGBT)搭建成橋式電路,在橋臂中心引出兩根導線,連接到電機的供電引腳上。
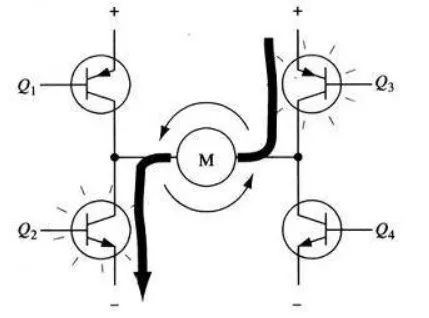
當使用單片機控制Q2,Q3導通,Q1,Q4截止時。電流經過過電源正極,經過Q3,電機線圈,Q2流到GND。假設這種狀態時電機正轉。
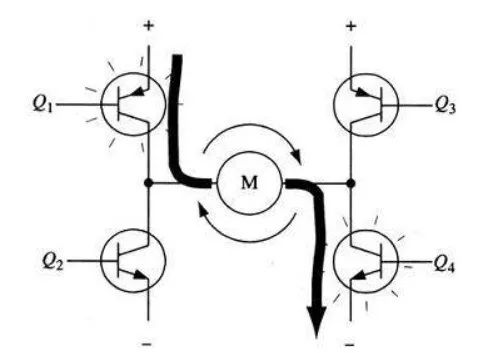
當使用單片機控制Q1,Q4導通,Q2,Q3截止時。電流經過過電源正極,經過Q1,電機線圈,Q4流到GND。假設這種狀態時電機反轉。
通過橋式電路的兩種狀態切換便可以輕松實現電機正反轉控制。對于有刷電機的正反轉控制還可以使用2個繼電器簡單實現,但是這種方式不便于調速控制,這里就不介紹了。
直流有刷電機調速****原理
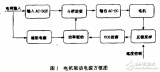
根據電機電壓平衡方程

從公式中可以看出電機轉速n和供電電壓成正比。所以通過改變電機供電電壓可以達到到調速的目的。
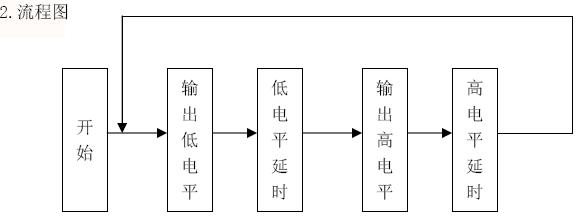
在電力電子中可以通過PWM波控制開關管導通與關閉來調制直流電壓。并且調制電壓滿足關系Vout=D*Vin,式中D為PWM波的占空比,等于在一個PWM周期內高電平持續的時間與PWM周期的比值。
調速方法:在進行晶體管控制時,可以選擇不同的三種斬波方式HPWM-LON,HON-LPWM,PWM-ON-PWM。我通常使用的為HPWM-LON方式即上管PWM,下管導通。
直流有刷電機驅動電路
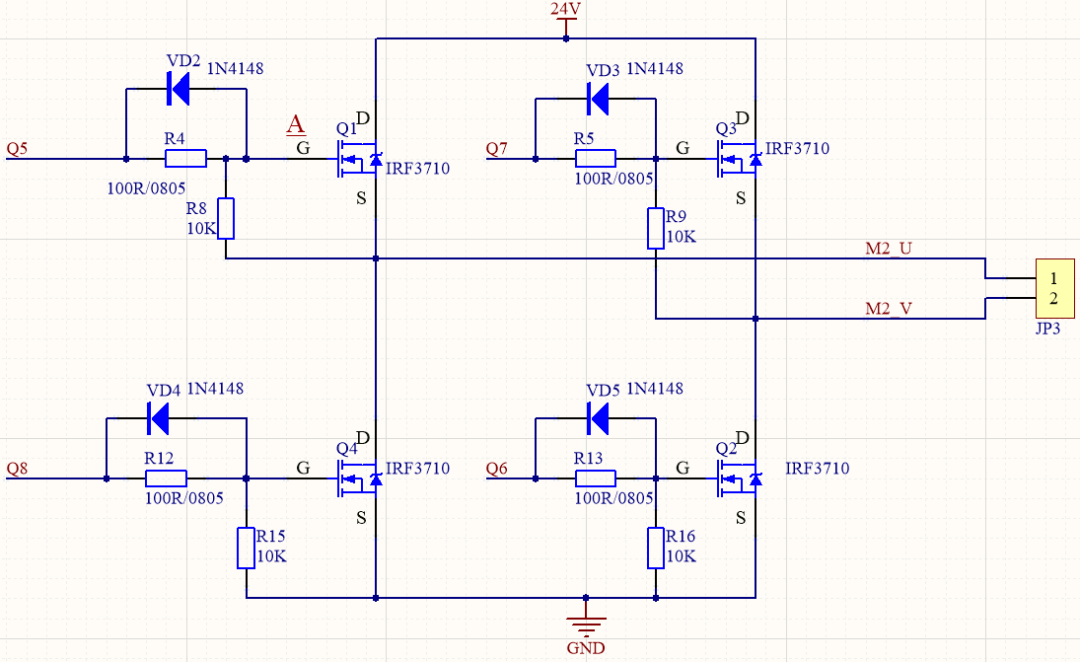
H橋電路采用4顆大電流NMOS管,柵極100歐姆電阻起到抑制浪涌電流的作用,10K電阻組成柵源寄生電容泄放回路,柵極二極管提供一個低阻抗MOS管關斷路徑,加快MOS管關斷。(電路中元件參數看根據實際PCB進行調整)
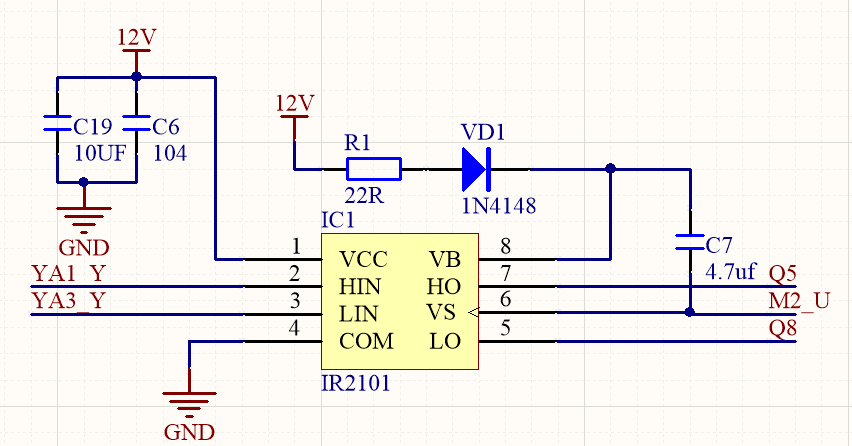
半橋驅動電路,當MOS管柵源電壓高于閾值電壓時MOS管開始導通,IRF3710的閾值電壓為4V。但是只是使用4V電壓進行驅動MOS管時,MOS管Rds比較大,MOS管不能流過過大電流,如下圖所示:
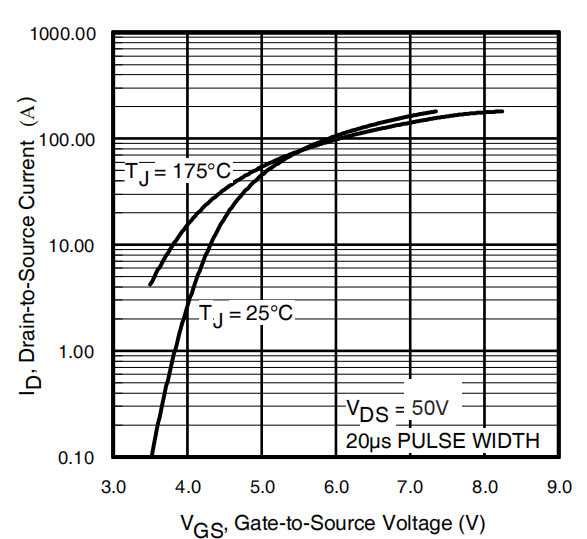
從圖中可以看出,隨著柵源電壓的增大MOS管的通流能力也就隨著增大。所以在驅動器設計過程中,我使用了12V電源作為MOS管的驅動,當MOS管導通時,MOS能夠有很小的Rds,使MOS管有更大的通流能力。
電路中C7作為自舉電容,當驅動H橋電路中的上橋臂時,由于上橋MOS管源級踩在較高的電壓上(24V),所以MOS管G極電壓應該比源極高12V時才能夠導通(Vgs=36V),這里利用電容兩端電壓不能突變的特性,半橋驅動芯片內部電路將MOS管柵極抬升至36V,此時MOS柵源電壓滿足導通條件。由于自舉電容C7需要不斷地間隔進行充電,也就導致了此種電路PWM占空比不能達到100%,在編程時需要特別注意。
-
機器人
+關注
關注
211文章
28466瀏覽量
207294 -
MOS管
+關注
關注
108文章
2420瀏覽量
66956 -
IGBT
+關注
關注
1267文章
3798瀏覽量
249175 -
ROS
+關注
關注
1文章
278瀏覽量
17022 -
有刷電機
+關注
關注
3文章
171瀏覽量
13663
發布評論請先 登錄
相關推薦








 工商網監
工商網監
評論