 一個簡單的線路跟隨器機器人電路
一個簡單的線路跟隨器機器人電路
本文介紹了一個簡單的線路跟隨器機器人電路,也稱為線路跟蹤器車輛,僅使用IC LM324的幾個運算放大器和其他一些組件,而無需使用復雜的Arduino或微控制器。
什么是從線機器人車
從線機器人車輛是自動導引車(AGV)的一種形式,它通過檢測繪制或嵌入地面的白線來運行。來自探測器的信號命令電動車輪根據線路自動轉動和調整,給人一種車輛正在跟隨線路的印象。因此,名稱行追隨者。
基本上,探測器的形式是光敏電阻,如LDR,半導體光探測器,如光電二極管或光電晶體管。
使用幾個這樣的光檢測器來檢測來自白線的反射光并切換晶體管電路或基于運算放大器的比較器,后者反過來控制機器人車輛的輪轂電機根據地面上白線的轉彎和曲線進行操縱。
使用窗口比較器
在建議的線路跟隨器機器人車輛電路中,我們使用幾個運算放大器比較器將電機接合到平衡行為中。
運算放大器被裝配為窗口組件。顧名思義,窗口比較器將來自檢波器的輸入信號與構成“窗口”閾值的兩個極端基準電壓進行比較。只要輸入信號電平在此“窗口”基準閾值內,兩個運算放大器的輸出就在其輸出端保持高邏輯。
但是,如果輸入信號趨于超過基準閾值,則相關運算放大器輸出變為低電平,導致運算放大器的輸出相反。這種不平衡促使輸出設備通過適當切換負載來糾正這種情況。
電路的工作原理
參考下面的線路跟隨器機器人車輛的電路圖,我們可以看到IC LM324的兩個運算放大器配置為窗口組件。
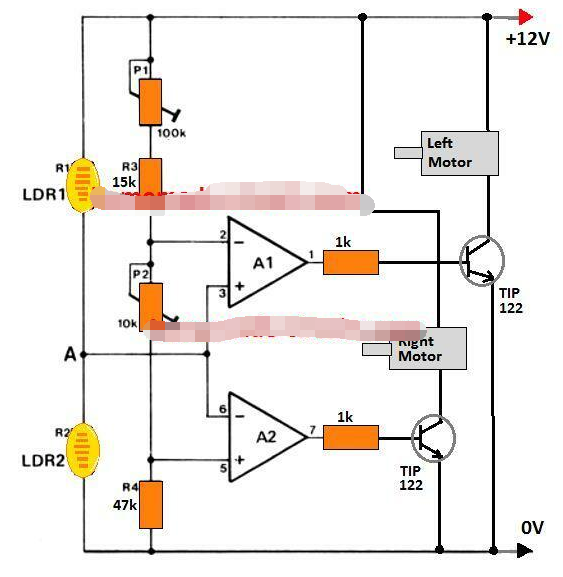
運算放大器可以來自 IC LM358 或 LM324
運算放大器上限連接以控制閾值上限,而下限運算放大器連接以控制閾值下限。
運算放大器A1的反相輸入和運算放大器A2的同相輸入用固定基準電壓箝位
運算放大器A1的同相輸入和運算放大器A2的反相輸入連接在一起,用于檢測光檢測器輸入信號的變化。
兩個光相關電阻器LDR1和LDR2的作用類似于光敏器件,它們被定位為光檢測器,使得它們均勻地接收來自白線的反射光。
只要LDR上的光足夠高且均勻,A1的引腳3仍然高于其引腳2,因為LDR1與正線相連。這會導致其輸出變高。
同樣,由于LDR2與地線的連接,A2的引腳6低于其引腳5,這使得A2的輸出保持高電平。
換言之,當LDR均勻點亮時,兩個運算放大器的同相(+)輸入都高于其反相(-)輸入,從而導致其輸出變為高電平。
當兩個輸出都為高電平時,晶體管驅動器保持各自的電機均勻運行,從而相應地允許車輛在直線上平穩運行。
機器人車輛如何跟隨生產線
當遇到彎曲的白線時,其中一個LDR偏離線,導致電路A點的光差。這隨后導致相關運算放大器輸出變低,相關電機瞬間停止。
在這種情況下,仍在運行的另一側電機迫使機器人車輛轉向線的彎曲角度,從而使陰影LDR回到白線的照明區域。當這種情況發生時,兩個電機再次開始運行,使機器人車輛能夠正常運行。
上述自動ON/OFF切換橫跨左/右電機,以響應彎曲白線的光線變化,迫使機器人車輛根據白線不斷調整和操縱。
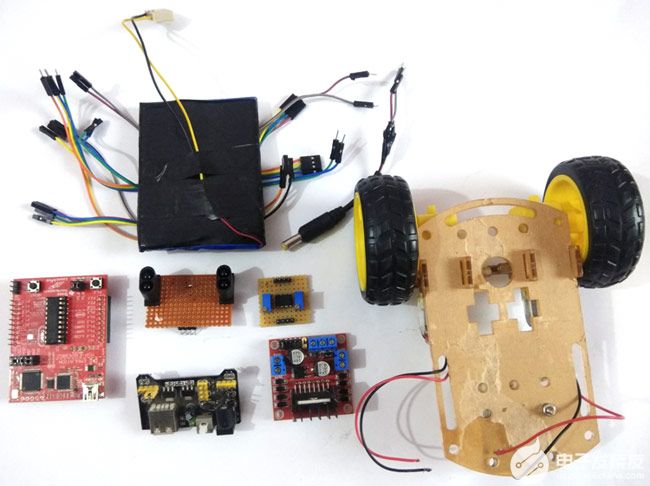
如何制造機器人車輛
在我之前的一篇文章中,我們學習了如何使用連接到矩形板后邊緣的幾個電機和板前邊緣的一對假輪來構建一個簡單的遙控車輛。
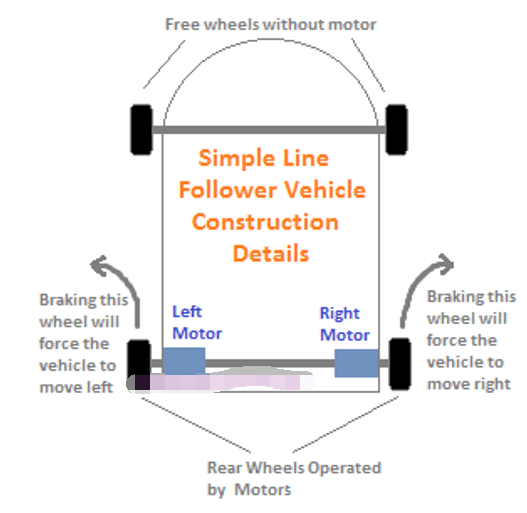
對于提議的線路跟隨機器人電路,我們也為車輛采用了類似的結構,如上圖所示。
布置看起來非常簡單,后輪連接有電機,電機由運算放大器輸出端的晶體管驅動器控制。
當機器人車輛偏離線路時,LDR上的光照水平差異會關閉其中一個運算放大器,從而停止相關電機。
這迫使正在運轉的對面電機轉向停止電機的一側,這意味著如果左側電機制動,機器人車輛將被迫向左轉,調整到彎曲線,方向相同。
這也表明,應適當地完成與運算放大器輸出的左/右電機集成,以使線路的彎曲方向和正在停止的電機位于車輛的同一側。
如何定位 LDR
由于兩個LDR(LDR1和LDR2)應該均勻地感測來自白線的反射光,因此它們的方向應垂直于線的長度,如下所示。
在這里,我們假設機器人車輛從右到左運行,沿著同一路徑上的既定路線運行。
LDR 的總寬度應在線的寬度范圍內。
LDR 和 LED 應安裝在車輛的底面,最好安裝在后側,就在后輪組的下方。
指示的 LED 是帶有串聯 1K 電阻器的白色 LED。它必須靠近LDR并位于中心,確保來自LDR的光不會直接到達LDR,而是光線應通過其下方白線的反射到達LDR。
電機規格
電機可以是任何永磁有刷類型,但應配備變速箱,以確保車輛的運動適當緩慢和穩定。
電機的額定功率應根據機器人車輛應承載的負載而定。這可以通過一些實際實驗來測試。
如何設置
要設置此線路跟隨機器人車輛電路,您必須在平坦的表面上繪制一小條白線,或在平坦的表面上粘貼一條白色膠帶。
如上圖所示,將系統(不帶輪子)放置在線路上,以便在線路寬度內正確調整 LDR 和 LED。
打開電源,白色 LED 應明亮地照亮其下方的區域。調整兩個預設,直到兩個電機同時打開。
現在稍微向右移動設備,使 LDR1 移出白線。
左側電機應停止。如果沒有,則調整 P1,直到左側電機停止。
接下來,將設備稍微向左移動,使 LDR2 移出白線。這應該會停止右側電機。如果沒有,則調整 10k 預設,直到右側電機停止。
這將完成設置程序,現在您可以將車輪安裝在電機上,并使用此導引車自動跟隨地面上鋪設的軌道。
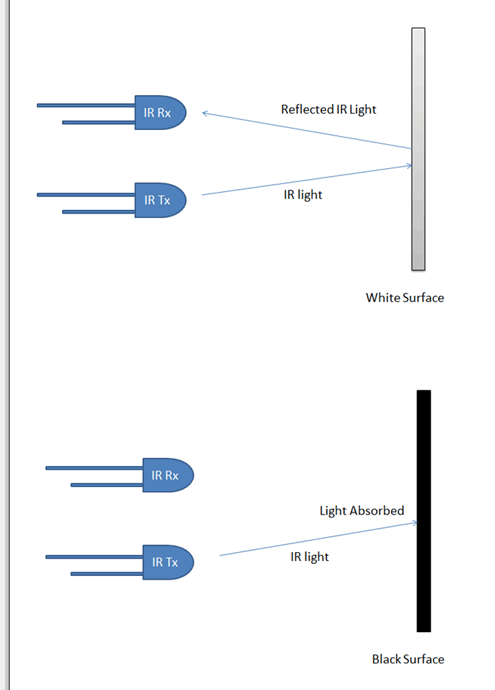
白線與黑線
所提出的線路從動器系統基于嵌入地面的白線,而不是黑線。使用白線代替黑線的優點如下:
與黑線相比,白線看起來更優雅和體面。
基于白線的從動器即使在完全黑暗或昏暗的環境光線下也可以工作。基于黑光的設計通常需要外部照明來保持車輛運行。
無論瓷磚顏色如何,基于白線的AGV都能更準確地工作,除了非常白或等同于白線顏色的瓷磚。
將車輛轉換為黑線跟隨器
盡管有上述優點,如果用戶更喜歡機器人車輛遵循黑線,那么系統可以通過對所提出的設計進行一些快速修改來輕松轉換。
用戶只需將運算放大器的輸入引腳連接與預設互換或交換,并移除與LDR相關的LED。
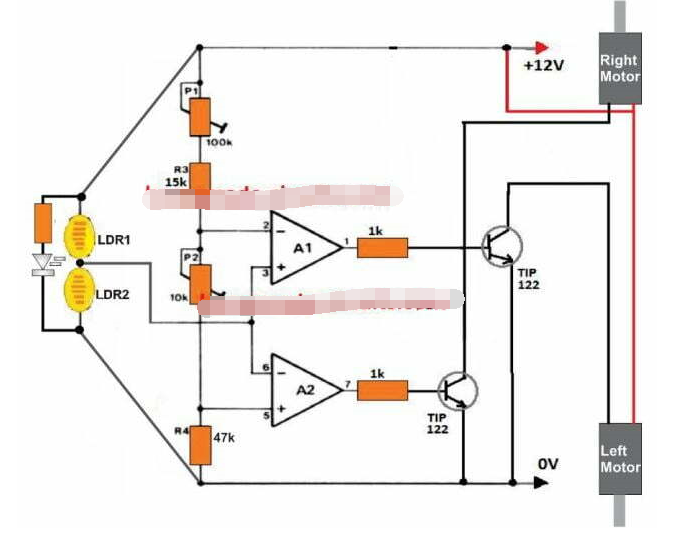
另一個簡單的線路跟隨器電路
運算放大器U1a觸發器將其輸出從正電平變為負極,反之亦然,以響應兩個LDR上不斷變化的光照水平。
該響應由U1b運算放大器放大,并饋送到驅動器運算放大器U1c、U1d。
當落在LDR1(R1)上的線路反射的光很高時,U1c、U1d的同相輸入獲得正信號,這導致其輸出變為正信號。
來自其輸出的正值導致Q1打開,因為它是NPN,并且這會打開連接的繼電器,這反過來又導致繼電器K1上的相關電機關閉,以便車輛可以暫時扭轉自身并糾正其方向,直到LDR上接收到均勻的光。
另一方面,如果發生相反的情況,即如果LDR2(R2)由于車輛迷失方向或可能是由于線路本身形成曲線而從地面獲得更多光線,則會導致負電壓在U1c和U1d的同相輸入端提供,其輸出現在變為負值。
負邏輯現在由PNP晶體管響應,但NPN晶體管保持無偏置且不導通。
PNP 繼電器傳導并停止相關的連接電機,以確保車輛自行扭轉并校正方向,直到兩個 LDR 上的光線相等。
另一個白線跟隨器電路(轉向控制)
用于檢查白線的傳感器是使用幾個光相關電阻(LOR)構建的,這些電阻器針對線的兩側,以確保每個LDR都能看到地面的一半白色半暗部分。白線通過燈泡點亮,以確保LDR具有相對較低的電阻。
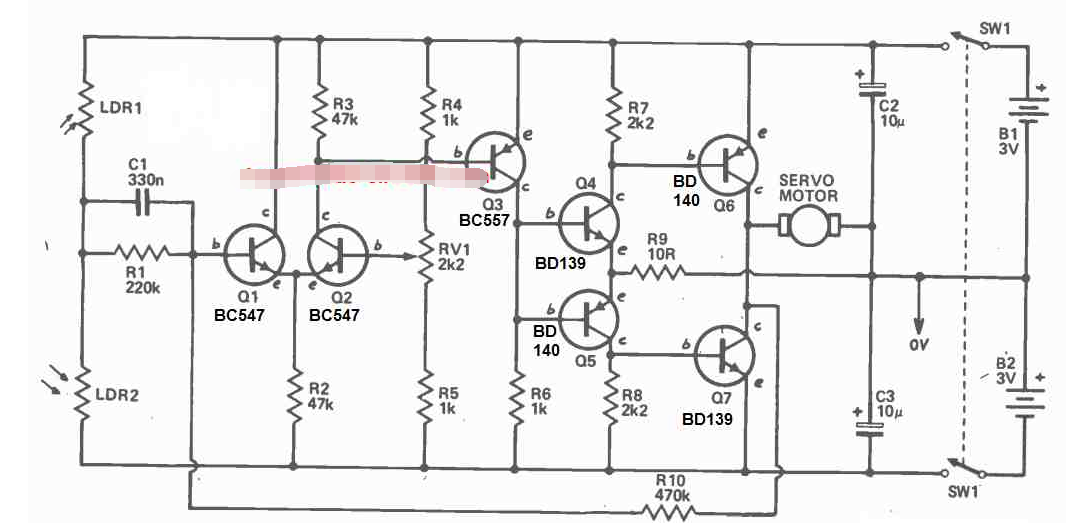
如果汽車或車輛偏離中心線,其中一個LDR將出現更高百分比的“白色”,導致其阻力成比例下降。由于兩個LDR在電源電壓上串聯連接,這意味著LDR結處的電壓將隨著車輛行駛而變化,同時沿著扭曲的白線行駛。
通過晶體管Q1和Q2將此變化電壓與預設RVI的設置進行比較。由此產生的誤差信號相應地調整伺服電機的旋轉方向,試圖補償誤差,確保機器人車輛自我調整并正確遵循白色軌道。
電阻R10提供負反饋,以最小化“開環增益”,而動態反饋由電容C1提供,電容C1的位置用于減少過沖。
請記住,上圖所示的伺服電機應該配置有車輛的轉機構,以便電機適當調整轉向,以保持車輛正確聚焦在白線上。
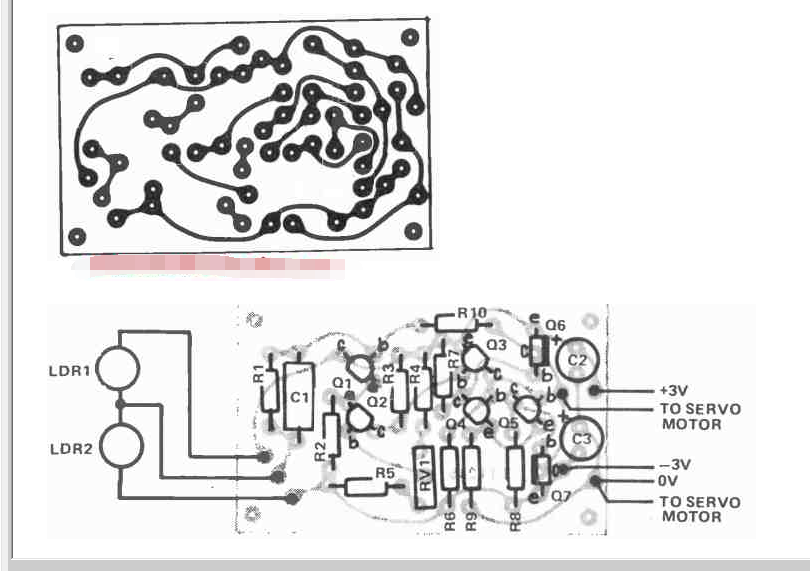
印刷電路板設計
-
機器人
+關注
關注
211文章
28380瀏覽量
206916 -
跟隨器
+關注
關注
1文章
86瀏覽量
29662 -
機器人電路圖
+關注
關注
0文章
2瀏覽量
5897
發布評論請先 登錄
相關推薦
如何使用AVR單片機構建一個線跟隨機器人
智能高爾夫機器人
避障機器人電路設計解決方案
【HarmonyOS IPC 試用連載 】智能跟隨機器人
怎樣去設計一個基于arduino的簡單記憶機器人
制作一個帶有PID控制器的線跟隨機器人







 工商網監
工商網監
評論