") 一文讀懂工業(yè)機器人的結(jié)構(gòu)、驅(qū)動及技術(shù)指標(biāo)
一文讀懂工業(yè)機器人的結(jié)構(gòu)、驅(qū)動及技術(shù)指標(biāo)
常用運動學(xué)構(gòu)形
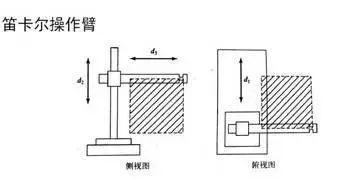
1、笛卡爾操作臂優(yōu)點:很容易通過計算機控制實現(xiàn),容易達到高精度。缺點:妨礙工作, 且占地面積大, 運動速度低, 密封性不好。
①焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標(biāo)、噴碼、打碼、(軟仿型)噴涂、目標(biāo)跟隨、排爆等一系列工作。
②特別適用于多品種,便批量的柔性化作業(yè),對于穩(wěn)定,提高產(chǎn)品質(zhì)量,提高勞動生產(chǎn)率,改善勞動條件和產(chǎn)品的快速更新?lián)Q代有著十分重要的作用。
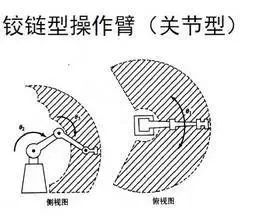
2、鉸鏈型操作臂(關(guān)節(jié)型)
關(guān)節(jié)機器人的關(guān)節(jié)全都是旋轉(zhuǎn)的, 類似于人的手臂,工業(yè)機器人中最常見的結(jié)構(gòu)。它的工作范圍較為復(fù)雜。
①汽車零配件、模具、鈑金件、塑料制品、運動器材、玻璃制品、陶瓷、航空等的快速檢測及產(chǎn)品開發(fā)。②車身裝配、通用機械裝配等制造質(zhì)量控制等的三坐標(biāo)測量及誤差檢測。③古董、藝術(shù)品、雕塑、卡通人物造型、人像制品等的快速原型制作。④汽車整車現(xiàn)場測量和檢測。⑤人體形狀測量、骨骼等醫(yī)療器材制作、人體外形制作、醫(yī)學(xué)整容等。
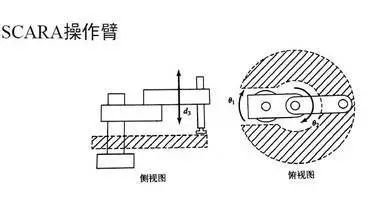
3、SCARA操作臂
SCARA機器人常用于裝配作業(yè), 最顯著的特點是它們在x-y平面上的運動具有較大的柔性, 而沿z軸具有很強的剛性, 所以, 它具有選擇性的柔性。這種機器人在裝配作業(yè)中獲得了較好的應(yīng)用。
①大量用于裝配印刷電路板和電子零部件②搬動和取放物件,如集成電路板等③廣泛應(yīng)用于塑料工業(yè)、汽車工業(yè)、電子產(chǎn)品工業(yè)、藥品工業(yè)和食品工業(yè)等領(lǐng)域.④搬取零件和裝配工作。
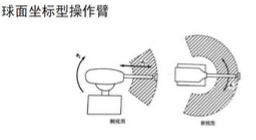
4、球面坐標(biāo)型操作臂
特點:中心支架附近的工作范圍大,兩個轉(zhuǎn)動驅(qū)動裝置容易密封,覆蓋工作空間較大。但該坐標(biāo)復(fù)雜, 難于控制,且直線驅(qū)動裝置存在密封的問題。
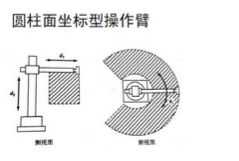
5、圓柱面坐標(biāo)型操作臂
優(yōu)點:且計算簡單;直線部分可采用液壓驅(qū)動,可輸出較大的動力; 能夠伸入型腔式機器內(nèi)部。缺點:它的手臂可以到達的空間受到限制, 不能到達近立柱或近地面的空間;直線驅(qū)動部分難以密封、防塵; 后臂工作時, 手臂后端會碰到工作范圍內(nèi)的其它物體。
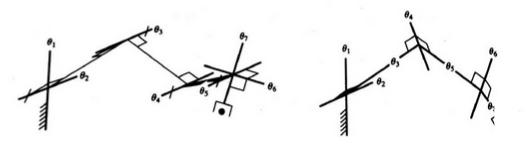
6、冗余機構(gòu)
通常空間定位需要6個自由度,利用附加的關(guān)節(jié)可以幫助機構(gòu)避開奇異位形。下圖為7自由度操作臂位形
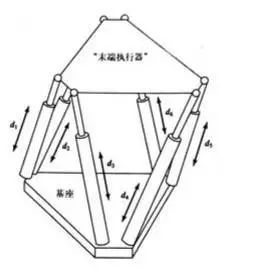
7、閉環(huán)結(jié)構(gòu)
閉環(huán)結(jié)構(gòu)可以提高機構(gòu)剛度,但會減小關(guān)節(jié)運動范圍,工作空間有一定減小。①運動模擬器;②并聯(lián)機床;③微操作機器人;④力傳感器;⑤生物醫(yī)學(xué)工程中的細胞操作機器人、可實現(xiàn)細胞的注射和分割;⑥微外科手術(shù)機器人;⑦大型射電天文望遠鏡的姿態(tài)調(diào)整裝置;⑧混聯(lián)裝備等,如SMT公司的Tricept混聯(lián)機械手模塊是基于并聯(lián)機構(gòu)單元的模塊化設(shè)計的成功典范。
工業(yè)機器人的幾種常用結(jié)構(gòu)形式(圖)

機器人的主要技術(shù)參數(shù)
機器人的技術(shù)參數(shù)反映了機器人可勝任的工作、具有的最高操作性能等情況,是設(shè)計、應(yīng)用機器人必須考慮的問題。機器人的主要技術(shù)參數(shù)有自由度、分辨率、工作空間、工作速度、工作載荷等。
1、自由度
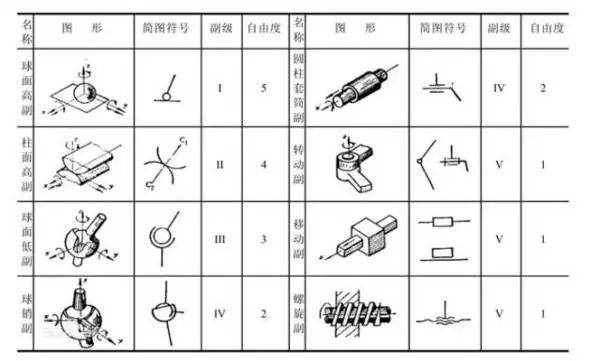
機器人具有的獨立坐標(biāo)軸運動的數(shù)目。 機器人的自由度是指確定機器人手部在空間的位置和姿態(tài)時所需要的獨立運動參數(shù)的數(shù)目。手指的開、合,以及手指關(guān)節(jié)的自由度一般不包括在內(nèi)。.機器人的自由度數(shù)一般等于關(guān)節(jié)數(shù)目。機器人常用的自由度數(shù)一般不超過5~6個。
2、關(guān)節(jié)(Joint)
即運動副,允許機器人手臂各零件之間發(fā)生相對運動的機構(gòu)。
3、工作空間
機器人手臂或手部安裝點所能達到的所有空間區(qū)域。其形狀取決于機器人的自由度數(shù)和各運動關(guān)節(jié)的類型與配置。機器人的工作空間通常用圖解法和解析法兩種
方法進行表示。
4、工作速度
機器人在工作載荷條件下、勻速運動過程中,機械接口中心或工具中心點在單位時間內(nèi)所移動的距離或轉(zhuǎn)動的角度。
5、工作載荷
指機器人在工作范圍內(nèi)任何位置上所能承受的最大負載,一般用質(zhì)量、力矩、慣性矩表示。還和運行速度和加速度大小方向有關(guān),一般規(guī)定高速運行時所能抓取的工件重量作為承載能力指標(biāo)。
6、分辨率
能夠?qū)崿F(xiàn)的最小移動距離或最小轉(zhuǎn)動角度。
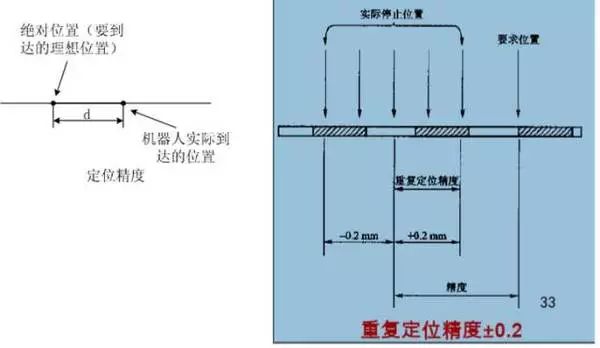
7、精度
重復(fù)性或重復(fù)定位精度:指機器人重復(fù)到達某一目標(biāo)位置的差異程度。或在相同的位置指令下,機器人連 續(xù)重復(fù)若干次其位置的分散情況。它是衡量一列誤差值的密集程度,即重復(fù)度。
機器人常用材料
1)碳素結(jié)構(gòu)鋼和合金結(jié)構(gòu)鋼 這類材料強度好,特別是合金結(jié)構(gòu)鋼,其強度增大了4~5倍,彈性模量E大,抗變形能力強,是應(yīng)用最廣泛的材料
2)鋁、鋁合金及其他輕合金材料 這類材料的共同特點是重量輕,彈性模量E并不大,但是材料密度小,故E/ρ之比仍可與鋼材相比。有些稀貴鋁合金的品質(zhì)得到了更明顯的改善,例如添加3.2%(重量百分比)鋰的鋁合金,彈性模量增加了14%,E/ρ比增加了16%。
3)纖維增強合金 這類合金如硼纖維增強鋁合金、石墨纖維增強鎂合金等,其E/ρ比分別達到11.4×107和8.9×107。這種纖維增強金屬材料具有非常高的E/ρ比,但價格昂貴。
4)陶瓷 陶瓷材料具有良好的品質(zhì),但是脆性大,不易加工,日本已經(jīng)試制了在小型高精度機器人上使用的陶瓷機器人臂樣品。
5)纖維增強復(fù)合材料 這類材料具有極好的E/ρ比,而且還具有十分突出的大阻尼的優(yōu)點。傳統(tǒng)金屬材料不可能具有這么大的阻尼,所以在高速機器人上應(yīng)用復(fù)合材料的實例越來越多。
6)粘彈性大阻尼材料 增大機器人連桿件的阻尼是改善機器人動態(tài)特性的有效方法。目前有許多方法用來增加結(jié)構(gòu)件材料的阻尼,其中最適合機器人采用的一種方法是用粘彈性大阻尼材料對原構(gòu)件進行約束層阻尼處理。
機器人主要結(jié)構(gòu)
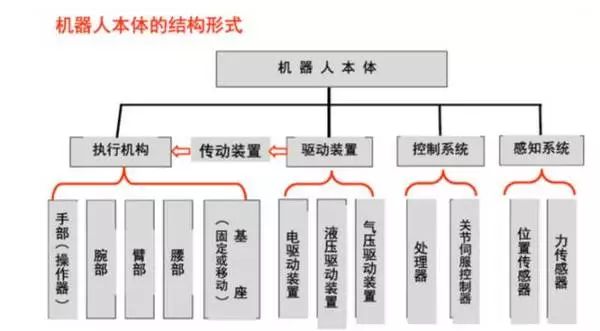
㈠、機器人驅(qū)動裝置
概念:要使機器人運行起來, 需給各個關(guān)節(jié)即每個運動自由度安置傳動裝置 作用:提供機器人各部位、各關(guān)節(jié)動作的原動力。
驅(qū)動系統(tǒng):可以是液壓傳動、氣動傳動、電動傳動, 或者把它們結(jié)合起來應(yīng)用的綜合系統(tǒng); 可以是直接驅(qū)動或者是通過同步帶、鏈條、輪系、諧波齒輪等機械傳動機構(gòu)進行間接驅(qū)動。
1、電動驅(qū)動裝置
電動驅(qū)動裝置的能源簡單,速度變化范圍大,效率高,速度和位置精度都很高。但它們多與減速裝置相聯(lián),直接驅(qū)動比較困難。
電動驅(qū)動裝置又可分為直流(DC)、交流(AC)伺服電機驅(qū)動和步進電機驅(qū)動。直流伺服電機電刷易磨損,且易形成火花。無刷直流電機也得到了越來越廣泛的應(yīng)用。步進電機驅(qū)動多為開環(huán)控制,控制簡單但功率不大,多用于低精度小功率機器人系統(tǒng)。
電動上電運行前要作如下檢查:
1)電源電壓是否合適(過壓很可能造成驅(qū)動模塊的損壞); 對于直流輸入的+/-極性一定不能接錯,驅(qū)動控制器上的電機型號或電流設(shè)定值是否合適(開始時不要太大);2)控制信號線接牢靠,工業(yè)現(xiàn)場最好要考慮屏蔽問題(如采用雙絞線);3)不要開始時就把需要接的線全接上,只連成最基本的系統(tǒng),運行良好后,再逐步連接。4)一定要搞清楚接地方法,還是采用浮空不接。5)開始運行的半小時內(nèi)要密切觀察電機的狀態(tài),如運動是否正常,聲音和溫升情況,發(fā)現(xiàn)問題立即停機調(diào)整。
2、液壓驅(qū)動
通過高精度的缸體和活塞來完成,通過缸體和活塞桿的相對運動實現(xiàn)直線運動。優(yōu)點:功率大,可省去減速裝置直接與被驅(qū)動的桿件相連,結(jié)構(gòu)緊湊,剛度好,響應(yīng)快,伺服驅(qū)動具有較高的精度。
缺點:需要增設(shè)液壓源,易產(chǎn)生液體泄漏,不適合高、低溫場合,故液壓驅(qū)動目前多用于特大功率的機器人系統(tǒng)。
選擇適合的液壓油。 防止固體雜質(zhì)混入液壓系統(tǒng),防止空氣和水入侵液壓系統(tǒng) 。機械作業(yè)要柔和平順機械作業(yè)應(yīng)避免粗暴,否則必然產(chǎn)生沖擊負荷,使機械故障頻發(fā),大大縮短使用壽命。要注意氣蝕和溢流噪聲。作業(yè)中要時刻注意液壓泵和溢流閥的聲音,如果液壓泵出現(xiàn)“氣蝕”噪聲,經(jīng)排氣后不能消除,應(yīng)查明原因排除故障后才能使用。保持適宜的油溫。液壓系統(tǒng)的工作溫度一般控制在30~80℃之間為宜。
3、氣壓驅(qū)動
氣壓驅(qū)動的結(jié)構(gòu)簡單,清潔,動作靈敏,具有緩沖作用。.但與液壓驅(qū)動裝置相比,功率較小,剛度差,噪音大,速度不易控制,所以多用于精度不高的點位控制機器人。
(1)具有速度快、系統(tǒng)結(jié)構(gòu)簡單,維修方便、價格低等特點。適于在中、小負荷的機器人中采用。但因難于實現(xiàn)伺服控制,多用于程序控制的機械人中,如在上、下料和沖壓機器人中應(yīng)用較多(2)在多數(shù)情況下是用于實現(xiàn)兩位式的或有限點位控制的中、小機器人中的。(3)控制裝置目前多數(shù)選用可編程控制器(PLC控制器)。在易燃、易爆場合下可采用氣動邏輯元件組成控制裝置。
㈡、直線傳動機構(gòu)。
傳動裝置是連接動力源和運動連桿的關(guān)鍵部分,根據(jù)關(guān)節(jié)形式,常用的傳動機構(gòu)形式有直線傳動和旋轉(zhuǎn)傳動機構(gòu)。
直線傳動方式可用于直角坐標(biāo)機器人的X、Y、Z向驅(qū)動,圓柱坐標(biāo)結(jié)構(gòu)的徑向驅(qū)動和垂直升降驅(qū)動,以及球坐標(biāo)結(jié)構(gòu)的徑向伸縮驅(qū)動
直線運動可以通過齒輪齒條、絲杠螺母等傳動元件將旋轉(zhuǎn)運動轉(zhuǎn)換成直線運動,也可以有直線驅(qū)動電機驅(qū)動,也可以直接由氣缸或液壓缸的活塞產(chǎn)生。
1、齒輪齒條裝置通常齒條是固定的。齒輪的旋轉(zhuǎn)運動轉(zhuǎn)換成托板的直線運動。· 優(yōu)點:結(jié)構(gòu)簡單。· 缺點:回差較大。
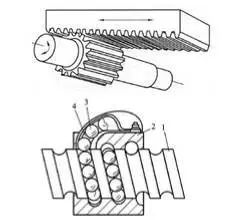
2、滾珠絲杠
在絲杠和螺母的螺旋槽內(nèi)嵌入滾珠,并通過螺母中的導(dǎo)向槽使?jié)L珠能連續(xù)循環(huán)。 · 優(yōu)點:摩擦力小,傳動效率高,無爬行,精度高 · 缺點:制造成本高,結(jié)構(gòu)復(fù)雜。
自鎖問題:理論上滾珠絲杠副也可以自鎖,但是實際應(yīng)用上沒有使用這個自鎖的,原因主要是:可靠性很差,或加工成本很高;因為直徑與導(dǎo)程比非常大,一般都是再加一套蝸輪蝸桿之類的自鎖裝置。
㈢、旋轉(zhuǎn)傳動機構(gòu)
采用旋轉(zhuǎn)傳動機構(gòu)的目的是將電機的驅(qū)動源輸出的較高轉(zhuǎn)速轉(zhuǎn)換成較低轉(zhuǎn)速,并獲得較大的力矩。機器人中應(yīng)用較多的旋轉(zhuǎn)傳動機構(gòu)有齒輪鏈、同步皮帶和諧波齒輪。
1、齒輪鏈(1)轉(zhuǎn)速關(guān)系(2)力矩關(guān)系
2、同步皮帶同步帶是具有許多型齒的皮帶,它與同樣具有型齒的同步皮帶輪相嚙合。工作時相當(dāng)于柔軟的齒輪。
· 優(yōu)點:無滑動,柔性好,價格便宜,重復(fù)定位精度高。· 缺點:具有一定的彈性變形。
3、諧波齒輪
諧波齒輪由剛性齒輪、諧波發(fā)生器和柔性齒輪三個主要零件組成,一般剛性齒輪固定,諧波發(fā)生器驅(qū)動柔性齒輪旋轉(zhuǎn)。主要特點:
(1)、傳動比大,單級為50—300。(2)、傳動平穩(wěn),承載能力高。(3)、傳動效率高,可達70%—90%。(4)、傳動精度高,比普通齒輪傳動高3—4倍。(5)、回差小,可小于3’。(6)、不能獲得中間輸出,柔輪剛度較低。
諧波傳動裝置在機器人技術(shù)比較先進的國家已得到了廣泛的應(yīng)用。僅就日本來說,機器人驅(qū)動裝置的60%都采用了諧波傳動。
美國送到月球上的機器人,其各個關(guān)節(jié)部位都采用諧波傳動裝置,其中一只上臂就用了30個諧波傳動機構(gòu)。
前蘇聯(lián)送入月球的移動式機器人“登月者”,其成對安裝的8個輪子均是用密閉諧波傳動機構(gòu)單獨驅(qū)動的。.德國大眾汽車公司研制的ROHREN、GEROT R30型機器人和法國雷諾公司研制的VERTICAL 80型機器人等都采用了諧波傳動機構(gòu)。
㈣、機器人傳感系統(tǒng)
1、感受系統(tǒng)由內(nèi)部傳感器模塊和外部傳感器模塊組成, 用以獲取內(nèi)部和外部環(huán)境狀態(tài)中有意義的信息。2、智能傳感器的使用提高了機器人的機動性、適應(yīng)性和智能化的水準(zhǔn)。3、智能傳感器的使用提高了機器人的機動性、適應(yīng)性和智能化的水準(zhǔn)。4、對于一些特殊的信息, 傳感器比人類的感受系統(tǒng)更有效。
㈤、機器人位置檢測
旋轉(zhuǎn)光學(xué)編碼器是最常用的位置反饋裝置。光電探測器把光脈沖轉(zhuǎn)化成二進制波形。軸的轉(zhuǎn)角通過計算脈沖數(shù)得到,轉(zhuǎn)動方向由兩個方波信號的相對相位決定。感應(yīng)同步器輸出兩個模擬信號——軸轉(zhuǎn)角的正弦信號和余弦信號。軸的轉(zhuǎn)角由這兩個信號的相對幅值計算得到。感應(yīng)同步器一般比編碼器可靠,但它的分辨率較低。
電位計是最直接的位置檢測形式。它連接在電橋中,能夠產(chǎn)生與軸轉(zhuǎn)角成正比的電壓信號。但是,由于分辨率低、線性不好以及對噪聲敏感。
轉(zhuǎn)速計能夠輸出與軸的轉(zhuǎn)速成正比的模擬信號。如果沒有這樣的速度傳感器,可以通過對檢測到的位置相對于時間的差分得到速度反饋信號。
㈥、機器人力檢測
力傳感器通常安裝在操作臂下述三個位置:
1、安裝在關(guān)節(jié)驅(qū)動器上。可測量驅(qū)動器/減速器自身的力矩或者力的輸出。但不能很好地檢測末端執(zhí)行器與環(huán)境之間的接觸力。2、安裝在末端執(zhí)行器與操作臂的終端關(guān)節(jié)之間,可稱腕力傳感器。通常,可以測量施加于末端執(zhí)行器上的三個到六個力/力矩分量。3、安裝在末端執(zhí)行器的“指尖”上。通常,這些帶有力覺得手指內(nèi)置了應(yīng)變計,可以測量作用在指尖上的一個到四個分力。
㈦、機器人-環(huán)境交互系統(tǒng)
1、機器人-環(huán)境交互系統(tǒng)是實現(xiàn)工業(yè)機器人與外部環(huán)境中的設(shè)備相互聯(lián)系和協(xié)調(diào)的系統(tǒng)。2、工業(yè)機器人與外部設(shè)備集成為一個功能單元,如加工制造單元、焊接單元、裝配單元等。也可以是多臺機器人、多臺機床或設(shè)備、多個零件存儲裝置等集成 。3、也可以是多臺機器人、多臺機床或設(shè)備、多個零件存儲裝置等集成為一個去執(zhí)行復(fù)雜任務(wù)的功能單元。
㈧、人機交互系統(tǒng)人機交互系統(tǒng)是使操作人員參與機器人控制并與機器人進行聯(lián)系的裝置。該系統(tǒng)歸納起來分為兩大類: 指令給定裝置和信息顯示裝置。
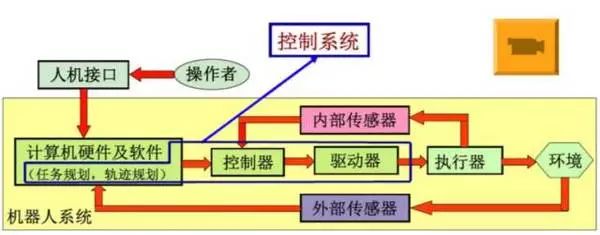
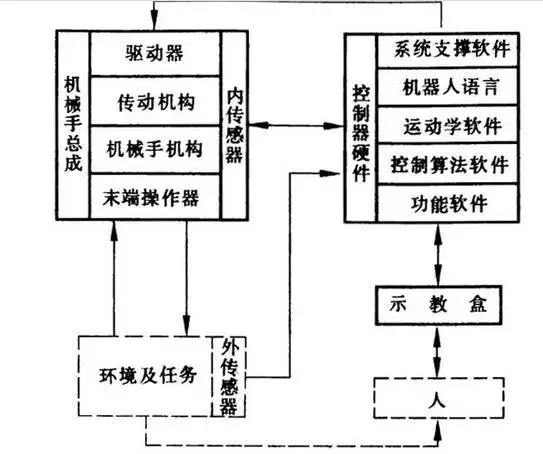
機器人的控制系統(tǒng)
1、機器人的控制系統(tǒng)
“控制”的目的是使被控對象產(chǎn)生控制者所期望的行為方式。.“控制”的基本條件是了解被控對象的特性。 “實質(zhì)”是對驅(qū)動器輸出力矩的控制。
2、機器人示教原理
機器人的基本工作原理是示教再現(xiàn);示教也稱導(dǎo)引,即由用戶導(dǎo)引機器人,一步步按實際任務(wù)操作一遍,機器人在導(dǎo)引過程中自動記憶示教的每個動作的位置、姿態(tài)、運動參數(shù)/工藝參數(shù)等,并自動生成一個連續(xù)執(zhí)行全部操作的程序。完成示教后,只需給機器人一個啟動命令,機器人將精確地按示教動作,一步步完成全部操作;
3、機器人控制的分類 :
1)按照有無反饋分為:開環(huán)控制、閉環(huán)控制;開環(huán)精確控制的條件:精確地知道被控對象的模型,并且這一模型在控制過程中保持不變。
2)按照期望控制量分為:位置控制,力控制,混合控制 ;位置控制分為:單關(guān)節(jié)位置控制(位置反饋,位置速度反饋,位置速度加速度反饋)、多關(guān)節(jié)位置控制、多關(guān)節(jié)位置控制分為分解運動控、集中控制;力控制分為:直接力控制、阻抗控制、力位混合控制 ;3)智能化的控制方式 :模糊控制、自適應(yīng)控制、最優(yōu)控制、神經(jīng)網(wǎng)絡(luò)控制、模糊神經(jīng)網(wǎng)絡(luò)控制 、專家控制以及其他;
4、控制系統(tǒng)硬件配置及結(jié)構(gòu):
由于機器人的控制過程中涉及大量的坐標(biāo)變換和插補運算以及較低層的實時控制,所以,目前的機器人控制系統(tǒng)在結(jié)構(gòu)上大多數(shù)采用分層結(jié)構(gòu)的微型計算機控制系統(tǒng),通常采用的是兩級計算機伺服控制系統(tǒng)。
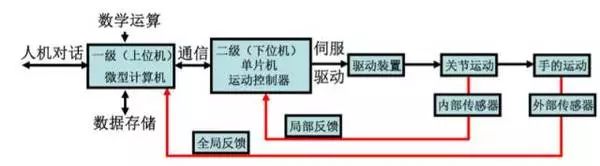
1)具體流程:
主控計算機接到工作人員輸入的作業(yè)指令后,首先分析解釋指令,確定手的運動參數(shù)。
然后進行運動學(xué)、動力學(xué)和插補運算,最后得出機器人各個關(guān)節(jié)的協(xié)調(diào)運動參數(shù)。這些參數(shù)經(jīng)過通信線路輸出到伺服控制級,作為各個關(guān)節(jié)伺服控制系統(tǒng)的給定信號。關(guān)節(jié)驅(qū)動器將此信號D/A轉(zhuǎn)換后驅(qū)動各個關(guān)節(jié)產(chǎn)生協(xié)調(diào)運動。傳感器將各個關(guān)節(jié)的運動輸出信號反饋回伺服控制級計算機形成局部閉環(huán)控制,從而更加精確的控制機器人手部在空間的運動。
2)基于PLC的運動控制 兩種控制方式:
1、利用PLC的某些輸出端口使用脈沖輸出指令來產(chǎn)生脈沖驅(qū)動電機,同時使用通用I/O或者計數(shù)部件來實現(xiàn)電機的閉環(huán)位置控制。
2、使用PLC外部擴展的位置控制模塊來實現(xiàn)電機的閉環(huán)位置控制主要是以發(fā)高速脈沖方式控制,屬于位置控制方式,一般點到點的位置控制方式較多。
審核編輯:湯梓紅
-
機器人
+關(guān)注
關(guān)注
211文章
28466瀏覽量
207314 -
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3367瀏覽量
92695 -
技術(shù)參數(shù)
+關(guān)注
關(guān)注
1文章
51瀏覽量
9841 -
驅(qū)動裝置
+關(guān)注
關(guān)注
0文章
67瀏覽量
12336
原文標(biāo)題:一文讀懂工業(yè)機器人結(jié)構(gòu)、驅(qū)動及技術(shù)指標(biāo)
文章出處:【微信號:指南車機器人科技,微信公眾號:指南車機器人科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
工業(yè)機器人的基本結(jié)構(gòu)
什么是工業(yè)機器人
如何系統(tǒng)性地學(xué)習(xí)工業(yè)機器人技術(shù)?
《工業(yè)機器人》,蔣剛編著的,附下載。
工業(yè)機器人的產(chǎn)業(yè)鏈
工業(yè)機器人按驅(qū)動方式可分為哪些?
工業(yè)機器人結(jié)構(gòu)、驅(qū)動及技術(shù)指標(biāo)詳解
拆開工業(yè)機器人,讓你見識機器人驅(qū)動系統(tǒng)中的電機種類
工業(yè)機器人的技術(shù)原理
工業(yè)機器人組成結(jié)構(gòu)相關(guān)資料分享
PDF——工業(yè)機器人技術(shù)及應(yīng)用
工業(yè)機器人結(jié)構(gòu)、驅(qū)動及技術(shù)指標(biāo)詳解
工業(yè)機器人結(jié)構(gòu)、驅(qū)動及技術(shù)
詳解工業(yè)機器人的機械結(jié)構(gòu)及技術(shù)指標(biāo)

解讀工業(yè)機器人結(jié)構(gòu)、驅(qū)動及技術(shù)指標(biāo)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論