") GPS北斗詳解
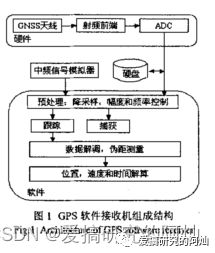
GPS北斗詳解
影響捕獲算法的兩個(gè)因素:
??1、捕獲的數(shù)據(jù)長度,對于信噪比比較高的信號,捕獲的數(shù)據(jù)長度取1~2ms即可,對于微弱信號增加數(shù)據(jù)長度可以提高捕獲的信噪比,去4~10ms。
??2、多普勒頻移搜索的步長。
??GPS信號采樣頻率不能是PRN碼速率的整數(shù)倍,否則將導(dǎo)致采樣與PRN碼同步,當(dāng)使用兩組時(shí)差小于單位采樣時(shí)間的采樣點(diǎn)采樣時(shí)總會得到相同的采樣數(shù)據(jù)。數(shù)字信號處理過程中得到的PRN碼的起始點(diǎn)初始相位的精確解的精度不會高于單位采樣時(shí)間。
??實(shí)際中,采樣頻率不能是PRN加上或者減去多普勒頻移所得的頻率值的整數(shù)倍,甚至也不要接近這個(gè)頻率值的整數(shù)倍,否則采樣數(shù)據(jù)會比較接近,需要較長的時(shí)間的數(shù)據(jù)才能檢測到采樣數(shù)據(jù)的時(shí)間差。
??由于C/A碼的周期是1ms,要完成碼的剝離必須搜索到碼相位,所以使用的捕獲數(shù)據(jù)的最小長度是1ms。
??當(dāng)碼相位搜索步長由1個(gè)采樣點(diǎn)增加到n個(gè)采樣點(diǎn)(1/2個(gè)碼元)是,輸出信噪比變化不大,基本不會影響捕獲。但是超過這個(gè)值,衛(wèi)星信噪比會嚴(yán)重衰減,從而使捕獲能力減弱。
??頻率步長的選擇范圍是0到單次相關(guān)運(yùn)算捕獲數(shù)據(jù)長度的倒數(shù),頻率步長增加時(shí),捕獲速度減慢,捕獲精度提高,捕獲能力提高。
??順序搜索算法的捕獲速度隨著N和K的增加或者頻率步長的減小而減慢,捕獲精度取決于開始是碼相位搜索步長和頻率搜索步長的設(shè)置,捕獲能力隨著N和K的增加或者頻率步長的減小而增加。綜合各方面的考慮,當(dāng)取N=1,K=1,頻率步長step=500Hz時(shí)可以得到比較理想的捕獲性能。
??基于圓卷積的FFT捕獲算法捕獲速度取決于K值的增加,與順序搜索算法相比要快得多,捕獲的碼相位精度為單位時(shí)間的采樣時(shí)間間隔,頻率解精度取決于步長設(shè)置,捕獲能力隨著K值的增加和步長減少而增強(qiáng)。
??在捕獲精度方面,順序捕獲算法和FFT頻域搜索算法碼相位精度都可以調(diào)節(jié),但是基于圓卷積的FFT捕獲算法的碼相位搜索步長只能取一個(gè)采樣點(diǎn),在捕獲數(shù)據(jù)長度不變的情況下,順序捕獲算法和基于圓卷積的捕獲算法的頻率搜索步長都能調(diào)節(jié),但是FFT頻域搜索算法只能依靠增加數(shù)據(jù)長度來提高頻率解精度。
??在捕獲能力方面,等捕獲速度相同的條件下,基于圓卷積的FFT捕獲算法可以捕獲更多的衛(wèi)星。
??通過測量本地PRN序列的真實(shí)起始點(diǎn)可以獲得精確的時(shí)間解,而要想獲得輸入信號中的真實(shí)起始點(diǎn)的方法:使用三種信號:即時(shí)、超前和滯后信號。本地產(chǎn)生的PRN碼看成是即時(shí)碼,在這個(gè)基礎(chǔ)上,以固定間隔生成超前和滯后碼。
??擴(kuò)頻通信的意義:在給定的傳輸速率C下,頻帶寬度W和信噪比P/N是可以相互轉(zhuǎn)化的,即可以通過增加頻帶的方法,在較低的信噪比情況下傳輸信息。擴(kuò)展頻譜換取要求的信噪比降低,就是擴(kuò)頻通信的重要特點(diǎn)。
??GPS電文格式:接收電文數(shù)據(jù)為50Hz,每幀數(shù)據(jù)1500bit,分為30s傳送,分成5個(gè)子幀,每個(gè)子幀300bit,6s傳送,傳送完整的歷書需要25幀,37.5kbit,12.5min,GPS接收機(jī)一旦開始工作就必須一次性將歷書接收完整。每個(gè)子幀300bit分成10個(gè)字,每個(gè)字30bit,每個(gè)字最后6bit均為奇偶校驗(yàn)碼。
??C/A碼由兩個(gè)十級線性反饋移位寄存器按照不可分解的多項(xiàng)式組合而成。寄存器有共同的1.023MHz的時(shí)鐘驅(qū)動(dòng),所有寄存器置一個(gè)初始狀態(tài),兩個(gè)十級移位寄存器分別為G1和G2,其中G2輸出抽頭決定了不同的C/A碼,G1的輸出抽頭固定為第十級寄存器,G1和G2的輸出抽頭進(jìn)行抑異或,結(jié)果為C/A碼序列。
??在一般的通訊中載波的作用是傳送運(yùn)輸調(diào)制信號,當(dāng)調(diào)制波到達(dá)接收機(jī)并解調(diào)出調(diào)制信號后,載波就不再起作用了。但在全球定位系統(tǒng)中,載波除了更好的傳送測距碼和導(dǎo)航電文外,本身也被當(dāng)作一種測距信號來使用。載波相位測量的精度很高,在高精度GPS定位中應(yīng)用相當(dāng)?shù)膹V泛。
??由于m序列的周期性,其自相關(guān)函數(shù)也是一個(gè)周期函數(shù)。并且當(dāng)兩個(gè)m序列彼此的偏差在一個(gè)碼位以內(nèi)時(shí),其相關(guān)函數(shù)值急劇增大,而在一個(gè)碼位以外,函數(shù)值很小。
??Gold碼是由兩個(gè)長度相同的互相關(guān)系數(shù)極大值為最小的m序列逐位模2加所得到的碼序列。
??用戶位置可以用四顆衛(wèi)星的數(shù)據(jù),采用最小二乘法求解。
??在多普勒頻移測量方面,為了避免出現(xiàn)多普勒計(jì)數(shù)的雙值性,用戶接收機(jī)不是直接測量接收頻率與發(fā)射頻率之差,而是測量接收頻率與本機(jī)基準(zhǔn)頻率之差,求其多普勒計(jì)數(shù)值。
??根據(jù)DSP的特點(diǎn),FPGA使用雙緩沖區(qū)方式,將數(shù)控AGC輸出的16個(gè)Zbit數(shù)據(jù)拼成32bit保存在當(dāng)前緩沖區(qū)中并且每個(gè)緩沖區(qū)最多保存6000個(gè)32bit數(shù)據(jù)。如果填滿當(dāng)前緩沖區(qū),自動(dòng)切換到下一個(gè)緩沖區(qū)、同時(shí)向DSP發(fā)出中斷,通知DSP讀取數(shù)據(jù)。
??DSP主要完成的任務(wù):數(shù)字混頻,偽碼相關(guān),捕獲跟蹤。
??解擴(kuò)通過本地偽碼信號和接收信號相乘實(shí)現(xiàn),解擴(kuò)之后,恢復(fù)出原始的窄帶數(shù)據(jù)信號,同時(shí)噪聲、多址干擾等不相關(guān)的信號仍然保持為寬帶信號,經(jīng)過低通濾波器就可將雜質(zhì)信號的大部分濾除。傳統(tǒng)的GPS接收機(jī)中,包括了偽碼解擴(kuò)和數(shù)據(jù)解調(diào)兩個(gè)過程,解擴(kuò)在碼延遲鎖定環(huán)中完成,得到數(shù)據(jù)碼調(diào)制的載波,在用一個(gè)Costas環(huán)就可以將載波剝離,最終得到數(shù)據(jù)碼。
??我國北斗二代導(dǎo)航系統(tǒng)的最新發(fā)展:
??打算OS服務(wù)模式的調(diào)制方式修改成如下:
??中心頻率:1575.42MHz,碼速率:1.023MHz,符號速率(導(dǎo)航碼速率):50/100Hz;調(diào)制方式:MBOC(6,1,1/11)。
??關(guān)于MBOC(6,1,1/11):這是從頻域上對MBOC進(jìn)行了定義,其功率譜密度是數(shù)據(jù)通道信號和導(dǎo)頻信號的聯(lián)合功率譜密度。其功率譜密度表達(dá)式為:
??式中1/11指數(shù)據(jù)和導(dǎo)頻通道中BOC(6,1)的功率只和占總功率的1/11。
??北斗系統(tǒng)定時(shí)播發(fā)時(shí)鐘同步信號,所有北斗終端可輸出北斗系統(tǒng)的精確時(shí)間信息,以校對SCADA系統(tǒng)各類設(shè)備的時(shí)鐘,保證系統(tǒng)同步。北斗導(dǎo)航系統(tǒng)的主要特點(diǎn)是將精確定位和短電文通信兩項(xiàng)功能結(jié)合在一個(gè)系統(tǒng)中。
?? 北斗系統(tǒng)具有定位、短數(shù)據(jù)通信和授時(shí)功能。
?? 授時(shí):PNT
??未來全球?qū)Ш叫l(wèi)星系統(tǒng)GNSS包括:北斗/GPS/GLONASS/伽利略。
??北斗導(dǎo)航相對與其他衛(wèi)星導(dǎo)航系統(tǒng)的顯著優(yōu)勢在于可為衛(wèi)星導(dǎo)航用戶提供系統(tǒng)級服務(wù)。例如:針對授時(shí)用戶,專門搭載單向和雙向授時(shí)信息。 通過授時(shí)完成與系統(tǒng)之間的時(shí)間和頻率同步,提供100ns(單向)和20ns(雙向)的時(shí)間同步精度。
??“北斗一號”系統(tǒng)是雙向的,用戶首先發(fā)射需要定位的信號,通過衛(wèi)星轉(zhuǎn)發(fā)至地面控制中心,地面控制中心解算出位置后再通過衛(wèi)星轉(zhuǎn)發(fā)給用戶,這實(shí)際上是既有定位又有通信功能,但是有容量限制。
?? 除了有北斗用戶機(jī)之外,還需要到北斗星通公司辦理一定的手續(xù)才能使用北斗系統(tǒng)。
??該系統(tǒng)用戶容量通常每小時(shí)僅為540000次。
??北斗一號衛(wèi)星定位系統(tǒng)由兩顆地球靜止衛(wèi)星(80°E和140°E)、一顆在軌備份衛(wèi)星(110.5°E)、中心控制系統(tǒng)、標(biāo)校系統(tǒng)和各類用戶機(jī)等部分組成。
?? 北斗一號的覆蓋范圍是北緯555°,東經(jīng)70140°之間的心臟地區(qū),上大下小,最寬處在北緯35°左右,其定位精度為水平精度100米,設(shè)立標(biāo)校站之后為20米,公共頻率2491.75MHz。
??定位原理:以2顆衛(wèi)星的已知坐標(biāo)為圓心,各以測定的本星至用戶機(jī)距離為半徑,形成2個(gè)球面,用戶機(jī)必然位于這2個(gè)球面交線的圓弧上。電子高程地圖提供的是一個(gè)地心為球心,一球心至地球表面高度為半徑的非均勻球面。求解圓弧線與地球表面交點(diǎn)即可獲得用戶位置。
??衛(wèi)星導(dǎo)航應(yīng)用產(chǎn)業(yè),已成為世界八大無線產(chǎn)業(yè)之一,也是全球信息產(chǎn)業(yè)中發(fā)展最快的產(chǎn)業(yè)。
??北斗系統(tǒng)是雙星有源定位,可以全天候、全天時(shí)提供區(qū)域衛(wèi)星導(dǎo)航信息的導(dǎo)航系統(tǒng)。
??衛(wèi)星并不發(fā)射導(dǎo)航電文,也不配備高精度的原子鐘,只是用于在地面中心站與用戶之間進(jìn)行雙向信號中繼。
??用戶終端為僅帶有定向天線的收發(fā)器,用于接收中心站通過衛(wèi)星轉(zhuǎn)發(fā)來的信號和向中心站發(fā)射通信請求,不含定位解算處理器,設(shè)備相對比較簡單。
?? 終端可以分為定位通信型(基本型用戶機(jī))、通信型、授時(shí)型和管理型(指揮型)用戶機(jī)。
??用戶還可以進(jìn)行精密授時(shí),地面中心站將發(fā)送標(biāo)準(zhǔn)時(shí)間和衛(wèi)星的位置信息。用戶進(jìn)行單向授時(shí)時(shí),接收此信號與本地時(shí)鐘進(jìn)行比對,計(jì)算出差值,然后調(diào)整本地時(shí)鐘與標(biāo)準(zhǔn)時(shí)間對齊,單向授時(shí)精度為100ns;進(jìn)行雙向授時(shí)時(shí),就將對比結(jié)果經(jīng)衛(wèi)星裝發(fā)回地面中心,由地面中心計(jì)算出本地時(shí)鐘和標(biāo)準(zhǔn)時(shí)間的差值,再經(jīng)兩顆衛(wèi)星之一轉(zhuǎn)發(fā)給用戶,用戶按此事件調(diào)整本地時(shí)鐘與標(biāo)準(zhǔn)時(shí)間信號對齊,雙授時(shí)精度為20ns。
??北斗用戶容量取決于衛(wèi)星的可用頻帶寬度、信號的調(diào)制和編碼方式以及地面中心站的運(yùn)算速度,用戶容量是有限的。還取決于用戶允許的信道阻塞率、詢問信號速率和用戶的響應(yīng)頻率。赤道地區(qū)的精度比較低。極高緯度因不能有效覆蓋而無法使用。
??北斗導(dǎo)航系統(tǒng)具有用戶與用戶、用戶與地面控制中心之間雙向數(shù)字報(bào)文通信能力,一般一次可以傳輸36個(gè)漢字,進(jìn)核準(zhǔn)的用戶利用連續(xù)傳輸方式可以傳輸120個(gè)漢字。
??北斗導(dǎo)航系統(tǒng)是主動(dòng)式雙向測距二維導(dǎo)航。
??北斗系統(tǒng)的缺陷:一是用戶定位的同時(shí)失去了無線電隱蔽性,在軍事上不利;二是設(shè)備必須包含發(fā)射機(jī),在體積、重量、價(jià)格和功耗方面處于不利的地位。
??北斗導(dǎo)航定位系統(tǒng)是由太空的導(dǎo)航通信衛(wèi)星、地面控制中心和客戶端三部分組成。
??客戶端是直接由用戶使用的設(shè)備,主要用于接收地面控制中心經(jīng)衛(wèi)星轉(zhuǎn)發(fā)的測距信號。
??北斗系統(tǒng)采用它采用碼分多址(CI)htA)制式,抗干擾性能大大優(yōu)于現(xiàn)有的衛(wèi)星導(dǎo)航系統(tǒng)。
??由于是同步衛(wèi)星,相對于終端來說,下行波束的角度很窄,也就是說,運(yùn)動(dòng)的地面終端必須不斷調(diào)整天線的指向,在車船上,是靠一整套的穩(wěn)定裝置,對于高速運(yùn)動(dòng)的設(shè)備,這是幾乎做不到的。
??工作頻段:中心站至衛(wèi)星C波段,上行6 GHz,下行4 GH;用戶機(jī)至衛(wèi)星,上行為L波段1 610MHz一1626.5MHz,下行為S波段,24 83.5MHz一25 00M Hz.傳輸速率:上行12.62 5kbps,下行31.25kbps。用戶機(jī)對衛(wèi)星的可工作仰角范圍:10°一75°。
??GPS傳輸?shù)闹行念l率是1.176GHz、1.227GHz和1.575GHz。
??格魯那斯傳輸?shù)闹行念l率是1.192GHz、1.278GHz和1.575GHz。
??北斗調(diào)制的方式為QPSK和BPSK。
??GPS獲得時(shí)間同步的方式為:使衛(wèi)星和接收機(jī)同步以使之在完全相同的時(shí)間內(nèi)產(chǎn)生相同的碼字。然后我們所要做的就是從衛(wèi)星接收碼字,在回頭看看在多久之前我們的接收機(jī)生成了相同的碼,時(shí)間差就是信號抵達(dá)我們的時(shí)間。
??北斗二代的中心頻率大致為:1561 MHz (E2), 1589 MHz (E1),1268 MHz (E6), and 1207 MHz (E5b)。
??北斗二代的使用的碼型極有可能是Gold碼。
??北斗二號是中程軌道衛(wèi)星,軌道高度大約為21550千米。
??PRN:偽隨機(jī)噪聲(pseudorandom noise)
??power spectral density:功率普密度(PSD)
??residual carrier phase:殘余載波相位
??北斗二號的碼元周期為1ms。
審核編輯黃宇
-
gps
+關(guān)注
關(guān)注
22文章
2896瀏覽量
166291 -
信號
+關(guān)注
關(guān)注
11文章
2791瀏覽量
76822 -
北斗
+關(guān)注
關(guān)注
3文章
600瀏覽量
36143
發(fā)布評論請先 登錄
相關(guān)推薦
京準(zhǔn)電鐘:GPS北斗衛(wèi)星校時(shí)服務(wù)器助力網(wǎng)絡(luò)安全

京準(zhǔn)電鐘:GPS北斗衛(wèi)星時(shí)間同步裝置作用是什么?
京準(zhǔn)電鐘:GPS北斗衛(wèi)星時(shí)鐘同步裝置電力系統(tǒng)方案

GPS北斗衛(wèi)星時(shí)鐘服務(wù)器功能是什么?

京準(zhǔn)電鐘:北斗授時(shí)器 GPS校時(shí)器 應(yīng)用視頻監(jiān)控系統(tǒng)

京準(zhǔn)電鐘:GPS北斗衛(wèi)星校時(shí)服務(wù)器助力區(qū)塊鏈數(shù)據(jù)網(wǎng)
京準(zhǔn)電子:GPS北斗衛(wèi)星時(shí)鐘同步系統(tǒng)助力精準(zhǔn)教育
京準(zhǔn)電鐘,GPS北斗衛(wèi)星授時(shí)服務(wù)器助力智慧水利系統(tǒng)
GPS北斗雙系統(tǒng):衛(wèi)星時(shí)鐘同步 衛(wèi)星對時(shí)裝置-安徽京準(zhǔn)

同步時(shí)鐘:北斗/GPS衛(wèi)星、電信基站、NTP以太網(wǎng)校時(shí)方式的區(qū)別

京準(zhǔn)電鐘:GPS北斗高精度時(shí)統(tǒng)同步系統(tǒng)具體參數(shù)是什么?
京準(zhǔn)電鐘:基于GPS與北斗高精度實(shí)時(shí)時(shí)鐘的時(shí)間同步方法
京準(zhǔn)電鐘|基于納秒級的GPS北斗衛(wèi)星授時(shí)服務(wù)器
NTP電子時(shí)鐘系統(tǒng):GPS北斗衛(wèi)星授時(shí)服務(wù)下的生活重塑

同步時(shí)鐘:北斗/GPS衛(wèi)星、電信基站、NTP以太網(wǎng)等多種校時(shí)方式的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論