") 雷達(dá)校招 | 往年雷達(dá)算法校招筆試題分析
雷達(dá)校招 | 往年雷達(dá)算法校招筆試題分析
本文首發(fā)于公眾號(hào)【調(diào)皮連續(xù)波】,其他平臺(tái)為自動(dòng)同步,內(nèi)容若不全或亂碼,請(qǐng)前往公眾號(hào)閱讀。保持關(guān)注調(diào)皮哥,和1.4W雷達(dá)er一起學(xué)習(xí)雷達(dá)技術(shù)!
2023年度會(huì)員內(nèi)容更新公告(04.10)
| 序號(hào) | 類別 | 內(nèi)容 | 文件路徑 |
|---|---|---|---|
| 1 | 雷達(dá)工具 |
雷達(dá)工具箱 MATLAB源碼 |
根目錄雷達(dá)工具箱 |
【正文】
編輯|小助理 審核|調(diào)皮哥
1、2016年5月美國佛羅里達(dá)州發(fā)生的特斯拉自動(dòng)駕駛第一起命案,當(dāng)時(shí)Models行駛在一條雙向、有中央隔離帶的公路上,自動(dòng)駕駛處于開啟模式,此時(shí)一輛拖掛車以與Models垂直的方向穿越公路
由于拖掛車正在橫穿公路,且車身較高,這一特殊情況導(dǎo)致Models從掛車底部通過時(shí),其前擋風(fēng)玻璃與掛車底部發(fā)生撞擊從而發(fā)生事故,據(jù)悉特斯拉的自動(dòng)駕駛系統(tǒng)安裝有77GHZ毫米波雷達(dá)系統(tǒng),關(guān)于毫米波雷達(dá)在此次自動(dòng)駕駛事故中失效的原因解釋你認(rèn)為正確的是
A. 橫向拖掛車的雷達(dá)特征與路牌類似,雷達(dá)誤以為是路牌
B. 白色拖掛車缺乏紋理特征雷達(dá)沒法檢測(cè)
C. 雷達(dá)安裝位置過低雷達(dá)波束從下側(cè)穿過卡車,導(dǎo)致漏檢
D. 橫向穿越的拖掛車其徑向速度為零,雷達(dá)無法檢測(cè)靜止的目標(biāo)
解析:目前這款雷達(dá)是傳統(tǒng)的毫米波雷達(dá),特點(diǎn)是只有距離、速度和水平角度信息,沒有高度信息。
A、B答案不符合雷達(dá)檢測(cè)道路障礙物的邏輯,顏色對(duì)雷達(dá)檢測(cè)不敏感。即使沒有高度信息,只要在雷達(dá)前方有目標(biāo)就屬于障礙物,此時(shí)的雷達(dá)還不具備目標(biāo)識(shí)別功能。
C答案不完全對(duì),雷達(dá)波束確實(shí)會(huì)穿過卡車底部,但俯仰維度還是存在一定的波束寬度,況且汽車是金屬,不可能完全沒有電磁波反射。
D答案在目前看來也是不完全對(duì)的,但是放在2016年的77G雷達(dá)可以認(rèn)為是對(duì)的。因?yàn)榭ㄜ囀谴怪盡odel Y方向行駛,如果同時(shí)行駛速度又很慢的話,因?yàn)槿狈较蚨嗥绽辗至浚走_(dá)的識(shí)別算法很容易將其當(dāng)成靜態(tài)目標(biāo)過濾掉。
當(dāng)前的4D成像雷達(dá),不僅存在高度信息,而且采用點(diǎn)云成像思路,即使橫向目標(biāo)運(yùn)動(dòng)緩慢,也會(huì)在距離維度(橫向運(yùn)動(dòng)的汽車其本身的徑向距離也是變化的)、微多普勒維度上體現(xiàn)。
2、關(guān)于信號(hào)處理中窗函數(shù)的影響,以下說法錯(cuò)誤的是
A. 會(huì)使得旁瓣變低
B. 會(huì)提升多目標(biāo)的分辨力
C. 會(huì)使得主瓣展寬
D. 切比雪夫(chebwin)加窗會(huì)使得旁瓣相等
解析:加窗會(huì)使得旁瓣降低,這是毋庸置疑的。能量守恒定律,旁瓣降低主瓣頻譜就會(huì)展寬,展寬頻譜也就意味著頻譜分辨率下降,因此對(duì)于多目標(biāo)的分辨力下降。在給定旁瓣高度下,Chebyshev窗的主瓣寬度最小,具有等波動(dòng)性,也就是說,其所有的旁瓣都具有相等的高度。
3、在雜波背景中進(jìn)行目標(biāo)檢測(cè)時(shí),為了提高目標(biāo)檢測(cè)性能,可以
A. 提高信號(hào)采樣率
B. 提高發(fā)射功率
C. 提高信號(hào)帶寬
D. 提高角度分辨率
E. 提高脈沖重復(fù)頻率
F. 增加積累時(shí)間
G. 提高信號(hào)時(shí)寬
解析:雷達(dá)的基本理論,這里顯然是只考慮雜波或者雜波占主要成分的場(chǎng)景。雜波是不需要的目標(biāo)(海雜波、地雜波、雨雪冰包雜波等),噪聲是不需要的信號(hào)成分,干擾是受到了其他電磁信號(hào)的干擾。
如果雜波返回功率大于系統(tǒng)噪聲功率,則雷達(dá)受雜波限制,信雜比必須等于或大于最小信噪比才能檢測(cè)到目標(biāo),信雜比定義公式:
其中,是脈沖持續(xù)時(shí)間,是光速,是目標(biāo)距離,是水平角波束寬度,是俯仰角波束寬度,是雷達(dá)橫截面積,是反向散射系數(shù)。信雜比提高需要窄脈沖和窄波束寬度,窄脈沖可以等效為高帶寬,窄波束寬度可以等效為高角度分辨率。
A提高信號(hào)采樣率是不行的,因?yàn)椴蓸勇蔬^高反而會(huì)混入高頻噪聲,尤其是高頻非平穩(wěn)噪聲,反而會(huì)影響目標(biāo)檢測(cè)。一般滿足工程上一般采樣率滿足2~5倍信號(hào)的最高頻率即可,不需要太高。
雜波的功率有可能比目標(biāo)還高,甚至淹沒弱小目標(biāo)。B單純提高發(fā)射功率,雜波的功率也會(huì)提高,水漲船高。
C提高信號(hào)帶寬可以提高距離分辨率,距離分辨率越高,目標(biāo)之間的差異越容易被發(fā)現(xiàn),檢測(cè)概率更高,同時(shí)否定了G。
D提高角度分辨率,同C,也是為了提高目標(biāo)與雜波之間的差異,同時(shí)符合信雜比公式。
E提高脈沖重復(fù)頻率,也就是降低脈沖重復(fù)周期,也就是提高最大不模糊速度,目標(biāo)速度越大,越容易與雜波區(qū)分,當(dāng)速度小于速度分辨率,則一定不能被檢測(cè)出來。所以,為了盡可能地提高檢測(cè)概率,必須同時(shí)在雜波抑制和2D-FFT中對(duì)距離維和速度維進(jìn)行高分辨率處理。
F增加積累時(shí)間,比如多個(gè)脈沖對(duì)消可以抑制雜波(如MTI),同時(shí)也能改善速度分辨率,彌補(bǔ)E選項(xiàng)的不足。
參考論文:一種基于FMCW雷達(dá)的慢速目標(biāo)檢測(cè)自適應(yīng)濾波器 (rhhz.net)
從FMCW毫米波雷達(dá)系統(tǒng)的性能參數(shù)理解4D成像毫米波雷達(dá)的設(shè)計(jì)思路
本問題讀者如果存在疑問,歡迎提出,答案僅作參考。
4、關(guān)于提升雷達(dá)作用距離以下說法正確的是
A. 增大天線增益
B. 提升雷達(dá)的發(fā)射功率
C. 增大雷達(dá)帶寬
D. 增加雷達(dá)脈沖數(shù)目
解析:根據(jù)雷達(dá)方程,A可以,B也可以,C單純?cè)黾訋拰?duì)提升雷達(dá)作用距離沒有用。D增加雷達(dá)脈沖數(shù)目可以增加脈沖積累的時(shí)間Tmeas=NTc,換句話說就是脈沖積累。
5、MUSIC算法稱為多信號(hào)分類算法(Multiple Signal classification)。MUSIC算法的基本思想是將輸出數(shù)據(jù)的協(xié)方差矩陣進(jìn)行特征分解,從而得到與信號(hào)分量相對(duì)應(yīng)的信號(hào)子空間和信號(hào)分量相正交的噪聲子空間,然后利用這兩個(gè)子空間的正交性來估計(jì)信號(hào)的入射方向,以下對(duì)于MUSIC算法的描述錯(cuò)誤的是:
A. 該算法可以突破瑞麗限的要求實(shí)現(xiàn)高分辨率,高精度
B. 該算法對(duì)于天線陣列形狀有要求,必須是等間距陣列
C. 該算法要求入射信號(hào)是不相干的
D. 信號(hào)子空間對(duì)應(yīng)于較小的特征值,噪聲空間對(duì)于較大的特征值
解析:MUSIC算法基本原理。MUSIC算法經(jīng)常用在稀布陣上,不一定等間距MUSIC算法推導(dǎo)過程中就是假設(shè)信源相互獨(dú)立,噪聲服從高斯分布,且與信源信號(hào)相互獨(dú)立噪聲子空間對(duì)應(yīng)較小的特征值,信號(hào)子空間對(duì)應(yīng)較大的特征值。
6、關(guān)于DBF的角度分辨率以下說法正確的是
A. 與波長(zhǎng)有關(guān),波長(zhǎng)越短角度分辨率越高
B. 陣列長(zhǎng)度有關(guān),陣列長(zhǎng)度越長(zhǎng)角度分辨率越高
C. 與陣元個(gè)數(shù)有關(guān),陣元個(gè)數(shù)越多角度分辨率越高
D. 各方向能達(dá)到的角度分辨率是相同的
E. 與陣元間距有關(guān),陣元間距越大角度分辨率越高
解析:DBF和FFT測(cè)角效果一致,如文章雷達(dá)算法 | 車載毫米波雷達(dá)DOA估計(jì)綜述(附MATLAB算法仿真)
故ABCE的說法是對(duì)的,如下公式:
雷達(dá)的角分辨率與雷達(dá)的波長(zhǎng)成反比,與天線的直徑或者叫孔徑成正比,就是說波長(zhǎng)越長(zhǎng),分辨率越低,孔徑越大,分辨率越高。
理論上,角分辨力由陣列主波束3dB寬帶決定。
7、在噪聲背景中進(jìn)行目標(biāo)檢測(cè)時(shí),為了提高目標(biāo)檢測(cè)性能,可以
A. 提高信號(hào)采樣率
B. 提高發(fā)射功率
C. 提高信號(hào)帶寬
D. 提高角度分辨率
E. 提高脈沖重復(fù)頻率
F. 增加積累時(shí)間
G. 提高信號(hào)時(shí)寬
解析:煙霧彈題,和前面那個(gè)雜波背景下容易搞懵,這個(gè)時(shí)候不要慌,要去分析雜波和噪聲的定義、特征、區(qū)別,以及從理論出發(fā)驗(yàn)證,都是紙腦虎。
兩個(gè)思路:提高信噪比和加強(qiáng)目標(biāo)信號(hào)。
A不行,上面分析過了。B可以,因?yàn)樘岣甙l(fā)射功率從雷達(dá)方程角度講,可以提高信噪比,如下所示:
C可以提高距離分辨,D提高角度分辨,都是有利于目標(biāo)檢測(cè)的。E可以提高最大不模糊速度,同時(shí)也會(huì)提高雷達(dá)的平均功率,在相同時(shí)間內(nèi)照射目標(biāo)的脈沖數(shù)更多,可以通過積累改善信噪比。
F可以通過脈沖積累提高信噪比。G增加信號(hào)時(shí)間寬度,反而會(huì)在接收機(jī)中增加噪聲能量。
8、關(guān)于卡爾曼濾波器,以下說法正確的是
A. 卡爾曼濾波器給出了協(xié)方差矩陣的準(zhǔn)確測(cè)量,能夠更好的實(shí)現(xiàn)波門的關(guān)聯(lián)處理
B. 卡爾曼濾波器增益的動(dòng)態(tài)計(jì)算意味著該濾波器可以用于多種機(jī)動(dòng)目標(biāo)環(huán)境
C. 卡爾曼濾波器的增益不會(huì)根據(jù)檢測(cè)歷史而自適應(yīng)的改變
D. 卡爾曼濾波器使得部分補(bǔ)償誤相關(guān)和誤關(guān)聯(lián)的影響成為了可能
解析:卡爾曼濾波分為三個(gè)步驟,即預(yù)測(cè)、實(shí)測(cè)和修正。答案為:ABD。
9、請(qǐng)給出如下所述信號(hào)的信號(hào)表達(dá)式或近似表達(dá)式
1)雷達(dá)發(fā)射線性調(diào)頻信號(hào),該信號(hào)帶寬為B,脈沖寬度為t,載頻為fc;
2)上述發(fā)射信號(hào)從距離為R處目標(biāo)反射的回波信號(hào):
3)若有N個(gè)接收陣元,各陣元可距為d,一目標(biāo)位于距離為R,角度為a的位置(與陣列法線夾角),請(qǐng)給出該目標(biāo)回波經(jīng)過解調(diào)后各陣元基帶回波的信號(hào)形式:
4)在2)中的回波信號(hào)與發(fā)射信號(hào)差頻后的信號(hào)的近似表達(dá)式。
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
10、已知雷達(dá)發(fā)射信號(hào)時(shí)寬為T,帶寬為B,信號(hào)重復(fù)周期為T,采樣率為fs,波長(zhǎng)為入,積累周期數(shù)為N。
1)若上述雷達(dá)為L(zhǎng)FMCW雷達(dá)體制,給出該雷達(dá)的最大不模糊距離、距離分辨率,測(cè)速范圍以及速度分辨率;
2)若該雷達(dá)為脈沖多普勒體制,給出該雷達(dá)的最大不模糊距離、距離分辨率、測(cè)速范圍以及速度分辨率;
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
11、已知雷達(dá)發(fā)射信號(hào)頻譜為X(f),時(shí)寬為T,帶寬為B,采樣率為fs,載頻為fc,請(qǐng)給出距離為R的目標(biāo)回波信號(hào)頻譜以及該回波信號(hào)經(jīng)過匹配濾波后的頻譜。
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
12、已知場(chǎng)景中無相對(duì)運(yùn)動(dòng)物體,雷達(dá)一個(gè)周期的回波為X(t),頻譜為X(f),信號(hào)周期為T,波長(zhǎng)為入,一共接收N個(gè)周期的回波信號(hào)。
1)對(duì)N個(gè)接收的回波信號(hào)進(jìn)行慢時(shí)間的N點(diǎn)FFT,請(qǐng)給出零多普勒通道信號(hào)的時(shí)域表達(dá)式及其頻譜
2)若對(duì)N個(gè)接收的回波信號(hào)進(jìn)行慢時(shí)間2N點(diǎn)的FFT,請(qǐng)給出零多普勒通道信號(hào)的時(shí)域表達(dá)式及其頻譜
3)若信號(hào)周期調(diào)整為2T,接收N個(gè)回波信號(hào)并進(jìn)行慢時(shí)間的N點(diǎn)FFT,請(qǐng)給出零多普勒通道信號(hào)的時(shí)域表達(dá)式及其頻譜
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
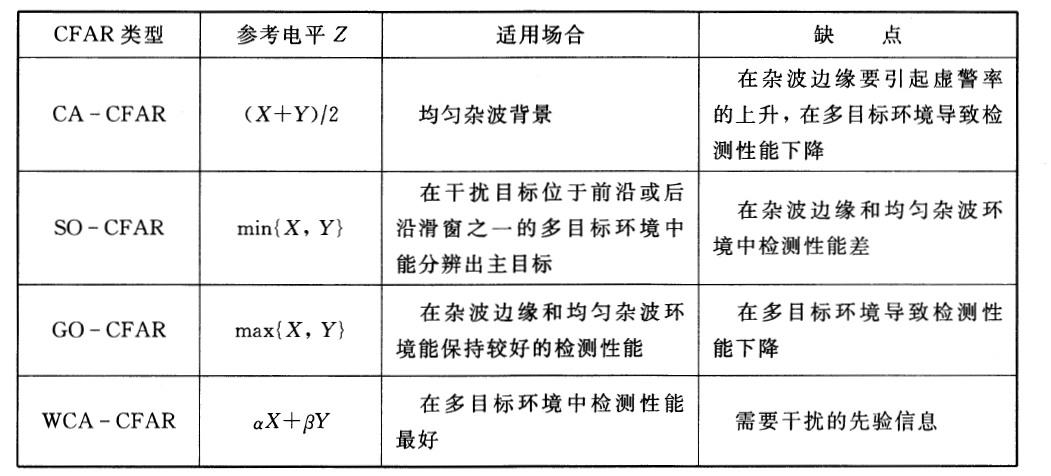
13、 目前雷達(dá)目標(biāo)檢測(cè)中常用的檢測(cè)算法有單元平均恒虛警(CA-CFAR),有序統(tǒng)計(jì)量恒虛警(OS-CFAR)以及最大最小恒虛警(SO/GO-CFAR),試說明以上幾種算法的優(yōu)劣。
CA-CFAR 計(jì)算邏輯簡(jiǎn)單,算法復(fù)雜度低,在工程中被廣泛應(yīng)用。但是 CA-CFAR 只在均勻環(huán)境中性能表現(xiàn)優(yōu)秀,在多目標(biāo)及雜波邊緣環(huán)境中無法消除臨近目標(biāo)與空域雜波能量突變對(duì)算法檢測(cè)性能的影響, 因而檢測(cè)概率損失嚴(yán)重、虛警概率偏離預(yù)設(shè)值。
GO-CFAR可以有效應(yīng)對(duì)雜波邊緣環(huán)境中能量突變的影響,但是在多目標(biāo)環(huán)境的應(yīng)用中檢測(cè)概率損失嚴(yán)重,性能惡化。
SO-CFAR可以有效地解決多目標(biāo)環(huán)境中臨近目標(biāo)對(duì)于算法性能的影響, 在多目標(biāo)環(huán)境的應(yīng)用中性能表現(xiàn)優(yōu)異,但是在應(yīng)對(duì)雜波邊緣環(huán) 境時(shí), 該算法的虛警概率惡化嚴(yán)重。
OS-CFAR在多目標(biāo)與雜波邊緣環(huán)境中檢測(cè)性能較好,但是在均勻環(huán)境中檢測(cè)性能有一定損失。
這里推薦看《現(xiàn)代雷達(dá)系統(tǒng)分析與設(shè)計(jì)》一書:
【本期結(jié)束】
本文不涉及任何利益,都是空閑時(shí)候的個(gè)人心得和體會(huì),僅供參考。目前我的工作經(jīng)驗(yàn)尚淺,還有很多內(nèi)容需要學(xué)習(xí),如果還有沒有說到或者不全面的地方,還請(qǐng)指正,感謝大家。
審核編輯黃宇
-
雷達(dá)
+關(guān)注
關(guān)注
50文章
2930瀏覽量
117465
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
請(qǐng)問DAC8760校零怎么給輸出加負(fù)值?
定華雷達(dá)儀表學(xué)堂:雷達(dá)液位計(jì)的導(dǎo)波管的使用注意事項(xiàng)
相控陣雷達(dá)電源芯片詳解
汽車雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場(chǎng)景
激光雷達(dá)在SLAM算法中的應(yīng)用綜述

分析DCDC4644電源芯片在F-35戰(zhàn)機(jī)相控陣雷達(dá)的應(yīng)用
從校招新星到前端技術(shù)專家的成長(zhǎng)之路
開放原子校源行Meetup | 湖南兩校共啟OpenHarmony技術(shù)實(shí)習(xí)實(shí)訓(xùn)!

定華雷達(dá)知識(shí)講堂:雷達(dá)液位計(jì)有哪些使用技巧
基于毫米波雷達(dá)的手勢(shì)識(shí)別算法
軟件算法賦能4D雷達(dá)性能提升

雷達(dá)檢測(cè)概率曲線的影響因素
生命體征監(jiān)測(cè)雷達(dá)模組
中央域控雷達(dá):4D雷達(dá)新時(shí)代






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論