 上位機如何實現控制 上位機需要網絡連接嗎
上位機如何實現控制 上位機需要網絡連接嗎
上位機如何實現控制
上位機可以通過和下位機通信來實現控制。下位機根據上位機傳遞的指令和參數執行具體的控制任務,例如控制機器人的運動、控制電機的轉速、調節溫度和濕度等。通常,下位機與各種硬件設備集成,例如傳感器、執行機構、運動控制器等。上位機通過采集下位機傳感器的數據,不斷更新控制策略,從而達到控制下位機的目的。同時,上位機可以根據下位機反饋的狀態信息和采集的數據進行實時的決策優化,達到增加控制精度和效率的目的。綜合來看,上位機通過和下位機通信、數據采集、決策和反饋的方式實現對下位機的控制。
伺服電機上位控制,主要是第一種模式,也就是伺服驅動器工作在放大器模式下,此時,充當上位機的就是PLC,運動控制器以及數控系統。如果把伺服驅動器比喻成發動機,那么上位機就是一套高級的無人駕駛系統。無論采用哪種上位機,上位機和伺服驅動器一般采用脈沖和通訊兩種方式。
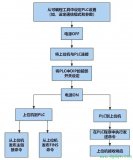
上位機通過發送脈沖到伺服驅動器,來實現控制。在這種方式下,用脈沖頻率來控制速度,用脈沖個數來控制位置。同樣,伺服驅動器也會發送脈沖數,來告訴上位機,伺服電機的位置和速度。
低端PLC,數控系統,以及各種單片機系統一般都是采用這種模式,簡單易行,成本低廉。很顯然,當伺服軸數增加,這種控制方式的缺點就會顯現出來,上位機硬件成本會增加,配線會很復雜,而且現場EMC不好的話,脈沖極易丟失。所以,這種模式一般是在四軸一下,所以,大部分PLC的脈沖控制軸數都在兩軸或是三軸,極少部分PLC可以實現四軸。
上位機需要網絡連接嗎
上位機不一定需要網絡連接,但是網絡連接可以使上位機實現更強大的功能,并且在實現遠程操作、數據采集和分析等方面有很大的優勢。通常,上位機會通過網絡連接到下位機、云端數據庫或其他企業內部資源,并且可以通過網絡控制下位機的狀態和參數,從而實現遠程操作和管理。
同時,網絡連接也可以實現上位機和其他設備之間的數據共享和協同工作,例如將上位機采集的數據分享到其他設備中進行進一步處理和分析。因此,網絡連接可以顯著提高上位機的效率、靈活性和可操作性。
-
伺服電機
+關注
關注
85文章
2046瀏覽量
57826 -
上位機
+關注
關注
27文章
941瀏覽量
54792 -
下位機
+關注
關注
0文章
94瀏覽量
18753
發布評論請先 登錄
相關推薦

上位機與pxi網絡連接不上

上位機和下位機是什么意思
上位機是什么?上位機具有哪些特點?上位機能替代PLC實現控制嗎?





 工商網監
工商網監
評論