

論文題目:SpinNet: Learning a General Surface Descriptor for 3D Point Cloud Registration
作者:Sheng Ao, Qingyong Hu, Bo Yang, Andrew Markham, Yulan Guo
和二維圖像匹配類似,三維點(diǎn)云匹配中,實(shí)現(xiàn)能夠在兩個(gè)掃描幀之間共享的魯棒局部特征也是一直以來十分棘手的問題。這項(xiàng)任務(wù)的挑戰(zhàn)性在于:1)不同的掃描幀通常具有不同的視角,2)原始3D掃描通常是不完整的、具有較多噪聲且點(diǎn)密度明顯不同的。針對(duì)這項(xiàng)任務(wù),已經(jīng)有許多傳統(tǒng)的方法被提出來,例如經(jīng)典的SHOT,ISS等。但是盡管它們?cè)诟哔|(zhì)量的3D點(diǎn)云上取得了令人鼓舞的結(jié)果,但它們不能推廣到高噪聲和大規(guī)模實(shí)際3D點(diǎn)云。最近,基于深度神經(jīng)網(wǎng)絡(luò)的點(diǎn)云匹配方法取得了出色的成果。然而,它們有兩個(gè)主要限制。第一,其中許多方法,如D3Feat和FCGF,依賴于基于核的點(diǎn)卷積或子流形稀疏卷積來提取每個(gè)點(diǎn)的特征,導(dǎo)致學(xué)得的點(diǎn)局部特征對(duì)旋轉(zhuǎn)敏感。因此,當(dāng)應(yīng)用于具有強(qiáng)烈旋轉(zhuǎn)變化的新型3D掃描幀時(shí),它們的性能會(huì)急劇下降。第二,雖然最近一些方法引入了旋轉(zhuǎn)不變的點(diǎn)描述符,但它們只是將手工特征或外部局部參考坐標(biāo)系集成到神經(jīng)網(wǎng)絡(luò)中,從根本上限制了網(wǎng)絡(luò)的表示能力。這篇論文則是致力實(shí)現(xiàn)用于三維點(diǎn)云匹配的信息豐富的旋轉(zhuǎn)不變特征。該網(wǎng)絡(luò)明顯滿足三個(gè)重要特性:1)它具有旋轉(zhuǎn)不變性,能從不同旋轉(zhuǎn)角度的3D掃描中學(xué)習(xí)一致的局部特征;2)它描述性強(qiáng)。本質(zhì)上,它保留了突出的局部特征,即使在噪聲、表面不完整或點(diǎn)密度不同時(shí)也能實(shí)現(xiàn);3)它不包括任何手工設(shè)計(jì)的特征。這個(gè)工作將極大的促進(jìn)三維點(diǎn)云的相關(guān)研究,提高對(duì)旋轉(zhuǎn)變換的魯棒性。
1 摘要
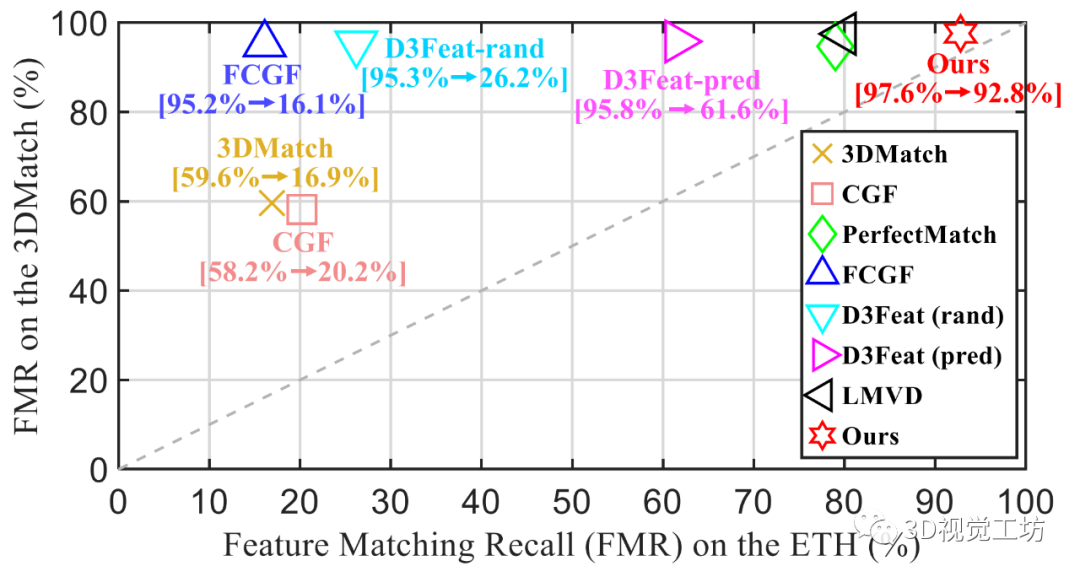
從點(diǎn)云配準(zhǔn)和重建等下游任務(wù)來看,提取魯棒且普適的3D局部特征至關(guān)重要。現(xiàn)有的基于學(xué)習(xí)的局部描述符要么對(duì)旋轉(zhuǎn)變換敏感,要么依賴于經(jīng)典手工制作的特征,既不具有普適性也不具有代表性。本文引入了一種新的、概念上簡(jiǎn)單的神經(jīng)結(jié)構(gòu),稱為SpinNet,以提取旋轉(zhuǎn)不變但足夠信息豐富從而實(shí)現(xiàn)精確配準(zhǔn)的局部特征。首先引入了一個(gè)空間點(diǎn)變形器將輸入的局部表面映射到一個(gè)精心設(shè)計(jì)的圓柱空間中,從而實(shí)現(xiàn)SO(2)等變表示的端到端優(yōu)化。然后利用強(qiáng)大的基于點(diǎn)和3D圓柱卷積神經(jīng)網(wǎng)絡(luò)層的神經(jīng)特征提取器來實(shí)現(xiàn)緊湊且具有代表性的描述符以用于匹配。在室內(nèi)外數(shù)據(jù)集上進(jìn)行的大量實(shí)驗(yàn)證明SpinNet顯著優(yōu)于現(xiàn)有的最新技術(shù)。更為重要的是,在不同傳感器模態(tài)的未見場(chǎng)景中具有最佳的泛化能力。
貢獻(xiàn)
我們提出了一個(gè)新的神經(jīng)特征學(xué)習(xí)器用于3D表面匹配。它具有旋轉(zhuǎn)不變性、代表性和在看不見的情況下具有卓越的泛化能力。
通過將轉(zhuǎn)換后的3D表面規(guī)則化成圓柱體,我們引入了強(qiáng)大的3D圓柱卷積來學(xué)習(xí)豐富和通用的特征。
我們進(jìn)行了大量實(shí)驗(yàn)和消融研究,證明了我們方法的顯著泛化能力。
2 方法
2.1 問題陳述
給定兩個(gè)部分重疊的點(diǎn)云和。點(diǎn)云配準(zhǔn)的任務(wù)是找到最優(yōu)剛性變換,以及點(diǎn)對(duì)應(yīng)關(guān)系來對(duì)齊成對(duì)的片段,最終恢復(fù)完整的場(chǎng)景。點(diǎn)對(duì)應(yīng)關(guān)系需要滿足:
其中表示旋轉(zhuǎn)矩陣,表示平移向量, 是殘差誤差。在實(shí)踐中,由于這個(gè)問題的非凸性,同時(shí)找到對(duì)應(yīng)關(guān)系和估計(jì)變換是不可行的。但是,如果可以確定具有一對(duì)一對(duì)應(yīng)關(guān)系的點(diǎn)子集和,則配準(zhǔn)問題可以簡(jiǎn)化為以下L2距離的最小化問題:

其中是成功匹配到的對(duì)應(yīng)關(guān)系數(shù),是一個(gè)置換矩陣,其元素滿足如果中的第個(gè)點(diǎn)對(duì)應(yīng)于中的第個(gè)點(diǎn),則,否則為0。
我們提出了一種新的表面特征學(xué)習(xí)器SpinNet,它是一個(gè)映射函數(shù),其中如果和 確實(shí)是正確匹配的,則等于任意剛性變換(如旋轉(zhuǎn)和平移)下的。特別地,我們的特征學(xué)習(xí)器主要由空間點(diǎn)形變器和神經(jīng)元特征提取器組成。
2.2 空間點(diǎn)形變器
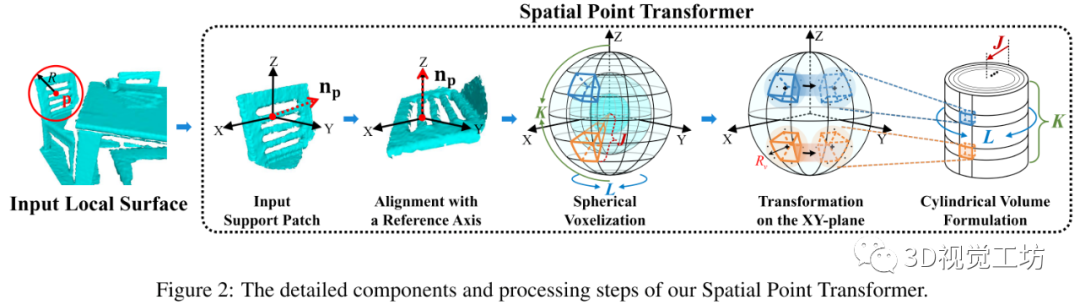
這個(gè)模塊旨在將輸入的3D表面空間轉(zhuǎn)換為柱形體,在克服旋轉(zhuǎn)變化的同時(shí)不丟失局部關(guān)鍵信息。如圖2所示,它包括四個(gè)組成部分,如下所述。
基于參考坐標(biāo)系進(jìn)行對(duì)齊
給定局部表面中的特定點(diǎn),我們首先從其半徑為的鄰域點(diǎn)集中估計(jì)一個(gè)朝向觀察方向的參考軸。然后使用旋轉(zhuǎn)矩陣將與Z軸對(duì)齊。與可能存在歧義和不穩(wěn)定的外部局部參考坐標(biāo)系相比,我們估計(jì)出來的在旋轉(zhuǎn)變化方面更加魯棒和穩(wěn)定。隨后,將鄰域點(diǎn)集轉(zhuǎn)換為。為了實(shí)現(xiàn)平移不變性,我們進(jìn)一步將標(biāo)準(zhǔn)化到中心點(diǎn),即。因此,獲得的局部塊已經(jīng)與z軸對(duì)齊,剩下的旋轉(zhuǎn)自由度完全留給XY平面。
球形體素化
這是本文的核心,在設(shè)計(jì)網(wǎng)絡(luò)時(shí)需要引入一些幾何知識(shí)先驗(yàn)實(shí)現(xiàn)一些歸一化,來加速訓(xùn)練、實(shí)現(xiàn)泛化:
為了進(jìn)一步消除XY平面上的旋轉(zhuǎn)不變性,我們利用旋轉(zhuǎn)魯棒的球形表示。特別地,將塊視為球體,并沿徑向距離,仰角和方位角均勻地將其分成個(gè)體素。每個(gè)體素的中心點(diǎn)被表示為,其中, , 。然后,我們明確確定了每個(gè)體素中心點(diǎn)的一組鄰域點(diǎn)。具體來說,我們使用半徑查詢找到以固定半徑為基礎(chǔ)的鄰域點(diǎn),其中 。最后,我們隨機(jī)采樣并保留每個(gè)體素的個(gè)點(diǎn),旨在實(shí)現(xiàn)并行計(jì)算的高效性。這個(gè)球形體素化步驟對(duì)于接下來的空間點(diǎn)變換至關(guān)重要。
。最后,我們隨機(jī)采樣并保留每個(gè)體素的個(gè)點(diǎn),旨在實(shí)現(xiàn)并行計(jì)算的高效性。這個(gè)球形體素化步驟對(duì)于接下來的空間點(diǎn)變換至關(guān)重要。
歡迎關(guān)注微信公眾號(hào)「3D視覺工坊」,加群/文章投稿/課程主講,請(qǐng)加微信:dddvisiona,添加時(shí)請(qǐng)備注:加群/投稿/主講申請(qǐng)
在XY平面上的變換
為了使每個(gè)球形體素在XY平面上具有旋轉(zhuǎn)不變性,我們將每個(gè)體素主動(dòng)繞Z軸旋轉(zhuǎn),將其中心與YZ平面對(duì)齊,其中旋轉(zhuǎn)矩陣定義如下:

這種操作消除了每個(gè)體素在XY平面上的一個(gè)旋轉(zhuǎn)自由度,而不會(huì)丟失每個(gè)體素的任何局部幾何信息。值得注意的是,現(xiàn)有的方法通常使用手工特征來實(shí)現(xiàn)旋轉(zhuǎn)不變性,導(dǎo)致豐富的局部信息被丟失。獨(dú)特的是,我們的簡(jiǎn)單策略可以保留這些信息。
圓柱體建模
一旦每個(gè)體素的局部幾何被轉(zhuǎn)換,進(jìn)一步保留跨多個(gè)體素的較大空間結(jié)構(gòu)就變得至關(guān)重要。這要求將所有體素的相對(duì)位置在整個(gè)框架中表示出來。為此,我們將球形體素重新組合成一個(gè)圓柱體。這有利于所提出的三維圓柱卷積網(wǎng)絡(luò),它保證了輸入局部表面的等變性,并保留了多個(gè)體素的拓?fù)淠J健>唧w來說,給定經(jīng)過轉(zhuǎn)換的球形體素,每個(gè)都有一組相鄰點(diǎn),我們將它們邏輯上投影到一個(gè)圓柱體積,表示為,如圖2所示。
總之,對(duì)于給定的輸入表面塊,我們的空間點(diǎn)變換器將其Z軸明確地與參考軸對(duì)齊,并主動(dòng)地對(duì)XY平面上的球形體素模式進(jìn)行轉(zhuǎn)換,并通過圓柱體建模進(jìn)一步保留了拓?fù)浔砻娼Y(jié)構(gòu)。顯然,該模塊使所有表面幾何保持完整,以供后續(xù)的神經(jīng)特征提取器學(xué)習(xí)。
2.3 神經(jīng)特征提取器
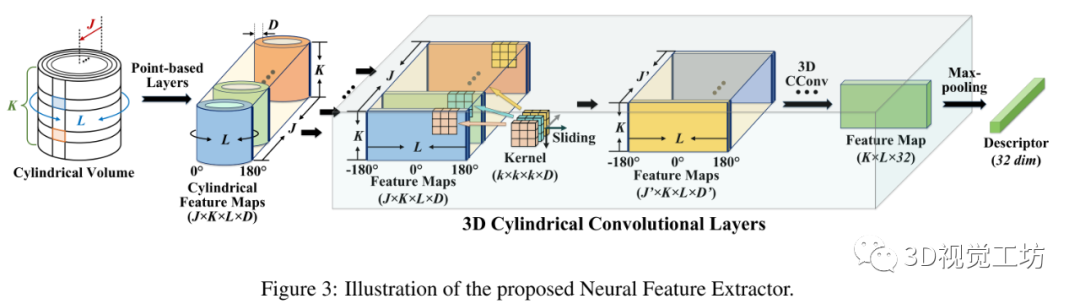
此模塊旨在使用強(qiáng)大的神經(jīng)網(wǎng)絡(luò)層從每個(gè)圓柱體素內(nèi)的轉(zhuǎn)換點(diǎn)中學(xué)習(xí)特征。如圖3所示,它包含兩個(gè)組件,具體討論如下。
基于點(diǎn)的網(wǎng)絡(luò)層
對(duì)于每個(gè)圓柱體素內(nèi)的點(diǎn),我們使用共享的MLP(多層感知器)和最大池化函數(shù)學(xué)習(xí)每個(gè)體素的初始特征。形式上,基于點(diǎn)的網(wǎng)絡(luò)層定義為:

其中是D維的學(xué)習(xí)特征,請(qǐng)注意,MLP權(quán)重在所有球形體素之間共享。最終,我們得到一組3D圓柱特征圖。
三維圓柱卷積層
為了進(jìn)一步學(xué)習(xí)多個(gè)體素之間的空間結(jié)構(gòu),我們提出了一種高效的3D圓柱卷積網(wǎng)絡(luò)(3DCCN)。特別是,給定位于第層中第個(gè)圓柱特征圖上位置的一個(gè)體素,我們的3DCCN定義如下:

其中是徑向維度上的卷積核大小,和分別是卷積核的高度和寬度,是可學(xué)習(xí)的參數(shù)。
與現(xiàn)有的卷積操作非常不同,我們提出的3DCCN在以下兩個(gè)方面是新穎的。第一,由于圓柱特征圖在整個(gè)圓柱體上是360度連續(xù)的,因此我們的3DCCN被設(shè)計(jì)為繞這些特征圖進(jìn)行卷積操作,即通過周期性邊界從?180度到180度。因此,我們的3DCCN中不需要顯式填充,但是在特征圖邊界處的3D CNN是必需的。第二, 與現(xiàn)有的3D流形稀疏卷積或核心點(diǎn)卷積相比,圍繞360度體積的連續(xù)卷積使得所獲取的特征圖具有等變性,從而實(shí)現(xiàn)了最終的旋轉(zhuǎn)不變性。在堆疊多個(gè)這些3DCCN層并進(jìn)行最大池化之后,原始的圓柱特征圖被壓縮成了一個(gè)緊湊且具有代表性的特征向量。
2.3 端到端應(yīng)用細(xì)節(jié)
空間點(diǎn)形變器直接與神經(jīng)元特征提取器相連,隨后采用現(xiàn)有的對(duì)比損失進(jìn)行端到端優(yōu)化。廣泛適用的批內(nèi)最難樣本抽樣也被即時(shí)采用,以最大化最近的正負(fù)樣本塊之間的距離。我們基于PyTorch框架實(shí)現(xiàn)了SpinNet。使用默認(rèn)參數(shù)的Adam優(yōu)化器。初始學(xué)習(xí)率設(shè)置為0.001,并且每5個(gè)epoch衰減率為0.5。我們訓(xùn)練網(wǎng)絡(luò)20個(gè)epoch,然后使用在驗(yàn)證集上表現(xiàn)最佳的模型進(jìn)行測(cè)試。為了公平比較,我們?cè)谒袑?shí)驗(yàn)中保持相同的設(shè)置。所有實(shí)驗(yàn)在Intel Xeon CPU @2.30GHZ和NVIDIA RTX2080Ti GPU的平臺(tái)上進(jìn)行。
審核編輯 :李倩
-
3D
+關(guān)注
關(guān)注
9文章
2955瀏覽量
110136 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4811瀏覽量
103011 -
點(diǎn)云
+關(guān)注
關(guān)注
0文章
58瀏覽量
3934
原文標(biāo)題:如何實(shí)現(xiàn)面向三維點(diǎn)云的信息豐富的旋轉(zhuǎn)不變特征
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
三維快速建模技術(shù)與三維掃描建模的應(yīng)用
基于stm32f4的三維旋轉(zhuǎn)顯示平臺(tái)設(shè)計(jì)資料(原理圖、代碼)
基于STM32的三維旋轉(zhuǎn)顯示平臺(tái)設(shè)計(jì)(立體成像)!!!
基于三維模型球型分割的信息隱藏算法
散亂點(diǎn)云數(shù)據(jù)特征信息提取算法
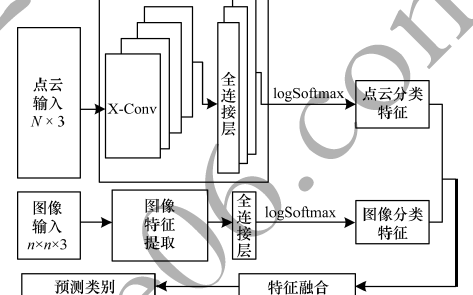
通過多模態(tài)特征融合來設(shè)計(jì)三維點(diǎn)云分類模型
基于局部表面特征的三維物體識(shí)別方法的研究現(xiàn)狀

點(diǎn)云的概念以及與三維圖像的關(guān)系

基于三維激光點(diǎn)云的目標(biāo)識(shí)別與跟蹤研究
基于三維激光點(diǎn)云的目標(biāo)識(shí)別與跟蹤研究

三維點(diǎn)云數(shù)據(jù)的兩種結(jié)構(gòu)Kdtree和Octree
什么樣的點(diǎn)可以稱為三維點(diǎn)云中的關(guān)鍵點(diǎn)呢?
一文詳解點(diǎn)云及三維圖像處理技術(shù)
智慧城市_實(shí)景三維|物業(yè)樓三維掃描案例分享_泰來三維

總結(jié)!三維點(diǎn)云基礎(chǔ)知識(shí)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論