 GD32開發實戰指南(基礎篇) 第7章 定時器
GD32開發實戰指南(基礎篇) 第7章 定時器
開發環境:
MDK:Keil 5.30
開發板:GD32F207I-EVAL
MCU:GD32F207IK
1 定時器的工作原理概述
系統滴答定時器一般用來提供“心跳”作用,而GD32定時器最基本功能也是定時,可以設置不同時間長度的定時。定時器除了最基本的定時功能外,定時器與GPIO有掛鉤使得它可以發揮強大的作用,比如可以輸出不同頻率、不同占空比的方波信號、PWM信號,同時做為輸入捕獲功能時,可以測量脈沖寬度、實現電容按鍵檢測等等。
GD32有三類定時器,基本定時器就是單純的定時計數器,通用定時器多了四個通道,相對應的增加了功能,高級定時器具有基本,通用定時器的所有的功能,并且添加了其他功能。定時器的對比特性如下表所示。
| 定時器 | 定時器****0/7 | 定時器****1/2/3/4 | 定時器****8/11 | 定時器****9/10/12/13 | 定時器****5/6 |
|---|---|---|---|---|---|
| 類型 | 高級 | 通用(L0) | 通用(L1) | 通用(L2) | 基本 |
| 預分頻器 | 16位 | 16位 | 16位 | 16位 | 16位 |
| 計數器 | 16位 | 16位 | 16位 | 16位 | 16位 |
| 計數模式 | 向上, 向下, 中央對齊 | 向上, 向下, 中央對齊 | 向上, 向下, 中央對齊 | 向上, 向下, 中央對齊 | 向上 |
1.1 基本定時器
TIMER5和TIMER6定時器的主要功能包括:
● 16位自動重裝載累加計數器
● 16位可編程(可實時修改)預分頻器,用于對輸入的時鐘按系數為1 ~ 65536之間的任意數值分頻
● 時鐘源只有內部時鐘
● 在更新事件(計數器溢出)時產生中斷/DMA請求
總的說來,基本定時器 TIMER5和TIMER6只具備最基本的定時功能,就是累加的時鐘脈沖數超過預定值時,能觸發中斷或觸發 DMA 請求。由于在芯片內部與 DAC 外設相連,可通過觸發輸出驅動 DAC,也可以作為其他通用定時器的時鐘基準。
這兩個基本定時器使用的時鐘源都是CK_TIMER驅動,時鐘源經過 TIMERx_PSC預分頻器輸入至脈沖計數器TIMERx_CNT,基本定時器只能工作在向上計數模式,在重載寄存器TIMERx_CAR中保存的是定時器的溢出值。
工作時,脈沖計數器TIMERx_CNT由時鐘觸發進行計數,當 TIMx_CNT 的計數值 X 等于重載寄存器TIMERx_CAR中保存的數值 N 時,產生溢出事件,可觸發中斷或 DMA 請求。然后TIMERx_CNT的值重新被置為 0,重新向上計數。
1.2 通用定時器
通用TIMERx(TIMER1/ TIMER2/ TIMER3/ TIMER4/ TIMER8/ TIMER11/ TIMER9/ TIMER10/ TIMER12/ TIMER13)定時器功能包括:
● 16位向上、向下、向上/向下自動裝載計數器;
● 16位可編程(可以實時修改)預分頻器,計數器時鐘頻率的分頻系數為1~65536之間的任意數值;
● 4個獨立通道:輸入捕獲,輸出比較,PWM生成(邊緣或中間對齊模式),單脈沖模式輸出;
● 使用外部信號控制定時器和定時器互連的同步電路;
● 如下事件發生時產生中斷/DMA:更新:計數器向上溢出/向下溢出,計數器初始化(通過軟件或者內部/外部觸發), 觸發事件(計數器啟動、停止、初始化或者由內部/外部觸發計數),輸入捕獲,輸出比較;
● 時鐘源可選:內部時鐘,內部觸發,外部輸入,外部觸發;
相比之下,通用定時器就比基本定時器復雜得多了。除了基本的定時,它主要用在測量輸入脈沖的頻率、脈沖寬與輸出 PWM 脈沖的場合,還具有編碼器的接口。
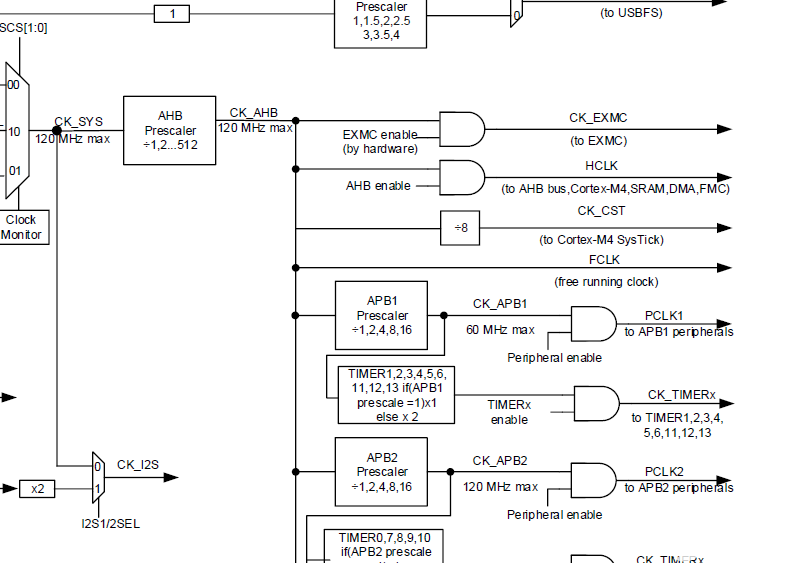
從時鐘源方面來說,通用定時器比基本定時器多了一個選擇,它可以使用外部脈沖作為定時器的時鐘源。使用外部時鐘源時,要使用寄存器進行觸發邊沿、濾波器帶寬的配置。如果選擇內部時鐘源的話則與基本定時器一樣,也為CK_TIMER。但要注意的是,所有定時器(包括基本、通用和高級)使用內部時鐘時,定時器的時鐘源都被稱為CK_TIMER,但CK_TIMER的時鐘來源并不是完全一樣的,見下圖。
基本定時器和部分通用定時器的時鐘來源是 APB1 預分頻器的輸出。當 APB1 的分頻系數為 1 時,則CK_TIMER直接等于該APB1 預分頻器的輸出,而 APB1 的分頻系數 不 為 1 時,CK_TIMER則為APB1 預分頻器輸出的 2 倍。
如在常見的配置中,AHB=120MHz,而 APB1 預分頻器的分頻系數被配置為2,則PCLK1 剛好達到最大值60MHz,而此時APB1的分頻系數不為 1,則CK_TIMER = (AHB/2) x 2 = 120MHz。
而對于部分通用定時器和高級定時器的時鐘來源則是 APB2 預分頻器的輸出,同樣它也根據分頻系數分為兩種情況。
常見的配置中 AHB=120MHz,APB2 預分頻器的分頻系數被配置為1,此時PCLK2剛好達到最大值120MHz,而CK_TIMER則直接等于APB2分頻器的輸出,即CK_TIMER的時鐘 CK_TIMER =AHB=120MHz。
雖然這種配置下最終CK_TIMER的時鐘頻率相等,但必須清楚實質上它們的時鐘來源是有區別的。還要強調的是:CK_TIMER是定時器內部的時鐘源,但在時鐘輸出到脈沖計數器 TIMERx_CNT 前,還經過一個預分頻器TIMERx_PSC,最終用于驅動脈沖計數器 TIMERx_CNT 的時鐘頻率根據預分頻器 TIMERx_PSC 的配置而定。
1.3 高級定時器
TIMER0和TIMER7定時器的功能包括:
● 16位向上、向下、向上/下自動裝載計數器;
● 16位可編程(可以實時修改)預分頻器,計數器時鐘頻率的分頻系數為1 ~ 65535之間的任意數值;
● 多達4個獨立通道:輸入捕獲,輸出比較,PWM生成(邊緣或中間對齊模式),單脈沖模式輸出;
● 死區時間可編程的互補輸出;
● 使用外部信號控制定時器和定時器互聯的同步電路;
● 允許在指定數目的計數器周期之后更新定時器寄存器的重復計數器;
● 剎車輸入信號可以將定時器輸出信號置于復位狀態或者一個已知狀態;
● 如下事件發生時產生中斷/DMA:更新:計數器向上溢出/向下溢出,計數器初始化(通過軟件或者內部/外部觸發),觸發事件(計數器啟動、停止、初始化或者由內部/外部觸發計數),輸入捕獲,輸出比較,剎車信號輸入;
● 支持針對定位的增量(正交)編碼器和霍爾傳感器電路;
● 時鐘源可選:內部時鐘,內部觸發,外部輸入,外部觸發;
總的來說,TIMER0和TIMER7是兩個高級定時器,它們具有基本、通用定時器的所有功能,還具有三相 6 步電機的接口、剎車功能(break function)及用于 PWM 驅動電路的死區時間控制等,使得它非常適合于電機的控制。如圖4 所示為高級定時器結構。
相比于通用定時器,主要多出了BRK、DTG 兩個結構,因而具有了死區時間的控制功能。首先,死區時間是什么呢?在 H 橋、三相橋的 PWM 驅動電路中,上下兩個橋臂的PWM 驅動信號是互補的,即上下橋臂輪流導通,但實際上為了防止出現上下兩個臂同時導通(會造成短路),在上下兩臂切換時留一小段時間,上下臂都施加關斷信號,這個上下臂都關斷的時間稱為死區時間。
高級定時器可以配置出輸出互補的 PWM 信號,并且在這個 PWM 信號中加入死區時間,為電機的控制提供了極大的便利。下圖中的 OCxREF 為參考信號(可理解為原信號),OCx_O和 OCx_ON 為定時器通過 GPIO 引腳輸出的 PWM 互補信號。
若不加入死區時間,當OxCPRE出現下降沿,OCx_O同時輸出下降沿,OCx_ON 則同時輸出相反的上升沿,即這三個信號的跳變是同時的。
加入死區時間后,當 OxCPRE出現下降沿,OCx_O同時輸出下降沿,但 OCx_ON 則過了一小段延遲再輸出上升沿,OxCPRE出現上升沿后,OCx_O要經過一段延時再輸出上升沿。假如 OCx_O、 OCx_ON 分別控制上、下橋臂,有了延遲后,就不容易出現上、下橋臂同時導通的情況。這個延遲時間與 PWM 信號驅動的電子器件特性相關,從事工控領域的朋友對此應該比較熟悉。
2 定時器計數模式
定時器可以向上計數、向下計數、向上向下雙向計數模式。
- 向上計數模式:計數器從0計數到自動加載值(TIMERx_CAR),然后重新從0開始計數并且產生一個計數器溢出事件。
- 向下計數模式:計數器從自動裝入的值(TIMERx_CAR)開始向下計數到0,然后從自動裝入的值重新開始,并產生一個計數器向下溢出事件。
- 中央對齊模式(向上/向下計數):計數器從0開始計數到自動裝入的值-1,產生一個計數器溢出事件,然后向下計數到1并且產生一個計數器溢出事件;然后再從0開始重新計數。
簡單地理解三種計數模式,可以通過下面的圖形:
圖6定時器計數模式
計數器時鐘可由下列時鐘源提供:
- 內部時鐘(CK_TIMER);
- 外部時鐘模式0:定時器選擇外部輸入引腳作為時鐘源;
- 外部時鐘模式1:定時器選擇外部輸入引腳ETI作為時鐘源;
3 定時器的寄存器分析
為了深入了解 GD32 的通用寄存器,下面我們先介紹一下與我們這章的實驗密切相關的幾個通用定時器的寄存器。首先是控制寄存器0(TIMERx_CTL0),該寄存器的各位描述如下圖。
首先我們來看看TIMERx_CTL0的最低位,也就是計數器使能位,該位必須置1,才能讓定時器開始計數。 從第 4 位 DIR 可以看出默認的計數方式是向上計數, 同時也可以向下計數,第 5,6位是設置計數對齊方式的。從第 8 和第 9 位可以看出,我們還可以設置定時器的時鐘分頻因子為1,2,4。
接下來介紹第二個與我們這章密切相關的寄存器:DMA/中斷使能寄存器(TIMERx_DMAINTEN)。該寄存器是一個 16 位的寄存器,其各位描述如下圖所示。
這里我們同樣僅關心它的第 0 位,該位是更新中斷允許位,本章用到的是定時器的更新中斷,所以該位要設置為1。
接下來我們看第三個與我們這章有關的寄存器:預分頻寄存器(TIMERx_PSC)。該寄存器用設置對時鐘進行分頻,然后提供給計數器,作為計數器的時鐘。該寄存器的各位描述如下圖。
這里順帶介紹一下TIMERx_CNT 寄存器,該寄存器是定時器的計數器,該寄存器存儲了當前定時器的計數值。
接著我們介紹計數器自動重載寄存器(TIMERx_CAR),該寄存器在物理上實際對應著 2 個寄存器。一個是程序員可以直接操作的,另外一個是程序員看不到的,這個看不到的寄存器在《GD32F20x_User_Manual_EN_Rev2.4》里面被叫做影子寄存器。事實上真正起作用的是影子寄存器。根據TIMERx_CTL0寄存器中ARSE位的設置:ARSE=0 時,預裝載寄存器的內容可以隨時傳送到影子寄存器,此時二者是連通的;而 ARSE=1 時,在每一次更新事件時,才把預裝在寄存器的內容傳送到影子寄存器。自動重裝載寄存器的各位描述如下圖。
最后,我們要介紹的寄存器是:中斷標志寄存器(TIMERx_INTF)。該寄存器用來標記當前與定時器相關的各種事件/中斷是否發生。該寄存器的各位描述如下圖。
關于這些位的詳細描述,請參考《GD32F20x_User_Manual_EN_Rev2.4》。只要對以上幾個寄存器進行簡單的設置,我們就可以使用通用定時器了,并且可以產生中斷。這一章,我們將使用定時器產生中斷,然后在中斷服務函數里面翻轉 DS1 上的電平,來指示定時器中斷的產生。
4 定時器代碼實現
接下來我們以通用定時器TIMER1為實例,來說明要經過哪些步驟,才能達到這個要求,并產生中斷。
4.1 定時器配置步驟
這里我們就對每個步驟通過庫函數的實現方式來描述。首先要提到的是,定時器相關的庫函數主要集中在固件庫文件 gd32f20x_timer.h 和 gd32f20x_timer.c 文件中。
1) TIMER1時鐘使能。
TIMER1是掛載在 APB1 之下,所以我們通過 APB1 總線下的使能使能函數來使能 TIMER1。調用的函數是:
rcu_periph_clock_enable(RCU_TIMER1);
2) 初始化定時器參數,設置自動重裝值,分頻系數,計數方式等。
在庫函數中,定時器的初始化參數是通過初始化函數 timer_init實現的:
void timer_init(uint32_t timer_periph, timer_parameter_struct *initpara)
第一個參數是確定是哪個定時器,這個比較容易理解。
第二個參數是定時器初始化參數結構體指針,結構體類型為 timer_parameter_struct,下面我們看看這個結構體的定義:
/* TIMER init parameter structure definitions */
typedef struct {
uint16_t prescaler; /*!< prescaler value */
uint16_t alignedmode; /*!< aligned mode */
uint16_t counterdirection; /*!< counter direction */
uint32_t period; /*!< period value */
uint16_t clockdivision; /*!< clock division value */
uint8_t repetitioncounter; /*!< the counter repetition value */
} timer_parameter_struct;
這個結構體一共有6個成員變量。
第一個參數 prescaler 是用來設置分頻系數的,剛才上面有講解。
第二個參數alignedmode是對齊模式,分為邊沿對齊模式,中央對齊向下計數置1模式,中央對齊向上計數置1模式,中央對齊上下計數置1模式。
第三個參數counterdirection是計數方向,向上計數和向下計數。
第四個參數period是設置自動重載計數周期值,這在前面也已經講解過。
第五個參數clockdivision是用來設置時鐘分頻因子。
第六個參數repetitioncounter是重復計數器。
針對 TIMER1初始化范例代碼格式:
timer_parameter_struct timer_initpara;
/* TIMER1 configuration */
timer_initpara.prescaler = 119;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 999;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER1, &timer_initpara);
3) 設置TIMERx_DMAINTEN允許更新中斷。
因為我們要使用 TIMER1的更新中斷, 寄存器的相應位便可使能更新中斷。 在庫函數里面定時器中斷使能是通過 timer_interrupt_enable()函數來實現的:
void timer_interrupt_enable(uint32_t timer_periph, uint32_t interrupt)
第一個參數是選擇定時器號,這個容易理解,取值為TIMERx(x=0..13)。
第二個參數非常關鍵,是用來指明我們使能的定時器中斷的類型,定時器中斷的類型有很多種,包括TIMER_INT_UP, TIMER_INT_TRG等等。
例如我們要使能 TIMER1 的更新中斷,格式為:
timer_interrupt_enable(TIMER1,TIMER_INT_UP);
4) TIMER1中斷優先級設置。
在定時器中斷使能之后,因為要產生中斷,必不可少的要設置 NVIC 相關寄存器,設置中斷優先級。中斷優先級配置代碼如下:
//TIMER1 interrupt setting, preemptive priority 0, sub-priority 3
nvic_irq_enable(TIMER1_IRQn, 0, 3);
5) 允許 TIMER1工作,也就是使能 TIMER1。
光配置好定時器還不行,沒有開啟定時器,照樣不能用。我們在配置完后要開啟定時器,通過 TIMER_CTL0的TIMER_CTL0_CEN位來設置。在固件庫里面使能定時器的函數是通過 timer_enable()函數來實現的:
void timer_enable(uint32_t timer_periph)
這個函數非常簡單,比如我們要使能定時器1,方法為:
/* TIMER1 enable */
timer_enable(TIMER1);
6) 編寫中斷服務函數。
在最后,還是要編寫定時器中斷服務函數,通過該函數來處理定時器產生的相關中斷。在中斷產生后,通過狀態寄存器的值來判斷此次產生的中斷屬于什么類型。然后執行相關的操作,我們這里使用的是更新(溢出)中斷,所以在中斷標志寄存器TIMERx_INTF的最低位。在處理完中斷之后應該向TIMERx_INTF最低位寫 0,來清除該中斷標志。
在固件庫函數里面,用來讀取中斷狀態寄存器的值判斷中斷類型的函數是:
FlagStatus timer_interrupt_flag_get(uint32_t timer_periph, uint32_t int_flag)
該函數的作用是,判斷定時器 TIMERx 的中斷類型是否發生中斷。比如,我們要判斷定時器1是否發生更新(溢出)中斷,方法為:
if ( timer_interrupt_flag_get(TIMER1 , TIMER_INT_UP) != RESET ) {}
固件庫中清除中斷標志位的函數是:
該函數的作用是,清除定時器 TIMERx 的中斷標志位。 使用起來非常簡單,比如我們在TIMER1 的溢出中斷發生后,我們要清除中斷標志位,方法是:
timer_interrupt_flag_clear(TIMER1 , TIMER_INT_UP);
這里需要說明一下,固件庫還提供了兩個函數用來判斷定時器狀態以及清除定時器狀態標志位的函數 timer_flag_get()和timer_flag_clear(),他們的作用和前面兩個函數的作用類似。只是在 timer_interrupt_flag_get()函數中會先判斷這種中斷是否使能,使能了才去判斷中斷標志位,而timer_flag_get()直接用來判斷狀態標志位。
通過以上幾個步驟,我們就可以達到我們的目的了,使用通用定時器的更新中斷,來控制LED的亮滅。
最后定時器核心配置代碼如下:
/*
brief configure the TIMER peripheral
param[in] tim_typedef_enum TIM_id, uint16_t prescaler, uint32_t period, uint8_t prePriority, uint8_t subPriority
param[out] none
retval none
*/
void timx_init(tim_typedef_enum TIM_id, uint16_t prescaler, uint32_t period, uint8_t prePriority, uint8_t subPriority)
{
/* TIMER configuration: generate PWM signals with different duty cycles */
timer_parameter_struct timer_initpara;
//Enable TIMER clock
rcu_periph_clock_enable(TIM_CLK[TIM_id]);
timer_deinit(TIM[TIM_id]);
/* TIMER configuration */
timer_initpara.prescaler = prescaler;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = period;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_init(TIM[TIM_id], &timer_initpara);
timer_interrupt_enable(TIM[TIM_id], TIMER_INT_UP); /* Enable timer interrupt */
//TIMER interrupt setting, preemptive priority 0, sub-priority 3
nvic_irq_enable(TIM_IRQn[TIM_id], prePriority, subPriority);
/* TIMER enable */
timer_enable(TIM[TIM_id]);
rcu_periph_clock_disable(TIM_CLK[TIM_id]);/* disable timer clock*/
}
中斷代碼如下:
/**
* @brief This function handles TIMER1 interrupt request.
* @param None
* @retval None
*/
void TIMER1_IRQHandler(void)
{
if ( timer_interrupt_flag_get(TIMER1 , TIMER_INT_UP) != RESET )
{
time++;
timer_interrupt_flag_clear(TIMER1 , TIMER_INT_UP);
}
}
主函數如下:
/*
brief main function
param[in] none
param[out] none
retval none
*/
int main(void)
{
//systick init
sysTick_init();
/* configure the TIMER peripheral */
timx_init(T1, 119, 999, 0, 1);
/* configure LED1 GPIO port */
led_init(LED1);
/* configure LED2 GPIO port */
led_init(LED2);
/* configure LED3 GPIO port */
led_init(LED3);
/* configure LED4 GPIO port */
led_init(LED4);
//Enable TIMER1 clock
rcu_periph_clock_enable(RCU_TIMER1);
while(1)
{
if ( time == 1000 ) /* 1000 * 1 ms = 1s 時間到 */
{
time = 0;
/* LED 取反 */
led_toggle(LED1);
led_toggle(LED2);
led_toggle(LED3);
led_toggle(LED4);
}
}
}
接下來分析下定時器溢出時間。
4.2 定時器溢出時間計算
1.定時器的時鐘源
定時器時鐘CK_TIMER經 APB1 預分頻器后分頻提供,如果 APB1 預分頻系數等于 1,則頻率不變,否則頻率乘以 2,庫函數中 APB1 預分頻的系數是 2,即 PCLK1=60M,所以定時器時鐘 CK_TIMER=60*2=120M。
其時鐘初始化代碼在system_stm32f20x.c定義的,這里使用的默認配置,具體時鐘設置函數是system_clock_120m_hxtal(),代碼如下:
/*!
\\brief configure the system clock to 120M by PLL which selects HXTAL(8M) as its clock source
\\param[in] none
\\param[out] none
\\retval none
*/
static void system_clock_120m_hxtal(void)
{
uint32_t timeout = 0U;
uint32_t stab_flag = 0U;
/* enable HXTAL */
RCU_CTL |= RCU_CTL_HXTALEN;
/* wait until HXTAL is stable or the startup time is longer than HXTAL_STARTUP_TIMEOUT */
do {
timeout++;
stab_flag = (RCU_CTL & RCU_CTL_HXTALSTB);
} while((0U == stab_flag) && (HXTAL_STARTUP_TIMEOUT != timeout));
/* if fail */
if(0U == (RCU_CTL & RCU_CTL_HXTALSTB)) {
while(1) {
}
}
/* HXTAL is stable */
/* AHB = SYSCLK */
RCU_CFG0 |= RCU_AHB_CKSYS_DIV1;
/* APB2 = AHB/1 */
RCU_CFG0 |= RCU_APB2_CKAHB_DIV1;
/* APB1 = AHB/2 */
RCU_CFG0 |= RCU_APB1_CKAHB_DIV2;
/* CK_PLL = (CK_PREDIV0) * 10 = 120 MHz */
RCU_CFG0 &= ~(RCU_CFG0_PLLMF | RCU_CFG0_PLLMF_4 | RCU_CFG0_PREDV0_LSB | RCU_CFG0_PLLSEL);
RCU_CFG0 |= (RCU_PLLSRC_HXTAL | RCU_PLL_MUL10);
/* CK_PREDIV0 = (CK_HXTAL) / 5 * 12 /5 = 12 MHz */
RCU_CFG1 &= ~(RCU_CFG1_PREDV0SEL | RCU_CFG1_PLL1MF | RCU_CFG1_PREDV1 | RCU_CFG1_PREDV0);
RCU_CFG1 |= (RCU_PREDV0SRC_CKPLL1 | RCU_PLL1_MUL12 | RCU_PREDV1_DIV5 | RCU_PREDV0_DIV5);
/* enable PLL1 */
RCU_CTL |= RCU_CTL_PLL1EN;
/* wait till PLL1 is ready */
while((RCU_CTL & RCU_CTL_PLL1STB) == 0U) {
}
/* enable PLL */
RCU_CTL |= RCU_CTL_PLLEN;
/* wait until PLL is stable */
while(0U == (RCU_CTL & RCU_CTL_PLLSTB)) {
}
/* select PLL as system clock */
RCU_CFG0 &= ~RCU_CFG0_SCS;
RCU_CFG0 |= RCU_CKSYSSRC_PLL;
/* wait until PLL is selected as system clock */
while(0U == (RCU_CFG0 & RCU_SCSS_PLL)) {
}
}
重點關注以下代碼:
/* APB1 = AHB/2 */
RCU_CFG0 |= RCU_APB1_CKAHB_DIV2;
而RCU_APB1_CKAHB_DIV2的定義如下:
#define RCU_APB1_CKAHB_DIV2 CFG0_APB1PSC(4) /*!< APB1 prescaler select CK_AHB/2 */
因此最終到TIMER1上的時鐘為120Mhz。
2.定時器頻率
TIMER1上的時鐘為120Mhz,定時器分頻系數為119,因此TIMER1的頻率為
CK_CNT=TIMERxCLK/(PSC+1)=1MHz
3.自動重裝載值
自動重裝載寄存器 TIMERx_CAR是一個 16 位的寄存器,這里面裝著計數器能計數的最大數值。當計數到這個值的時候,如果使能了中斷的話,定時器就產生溢出中斷,這里設置的是999。
完整配置參數如下:
Prtscaler (定時器分頻系數) : 119
Counter Mode(計數模式) :Up(向上計數模式)
Counter Period(自動重裝載值) : 999
CKD(時鐘分頻因子) : No Division 不分頻
定時器溢出時間:
Tout=1/(Tclk/psc) *(arr+1)
本文設置參數為: arr=999 psc=119 Tclk=120Mhz ,因此最終的溢出時間如下:
Tout=1/(120MHz /(119+1)) *(999+1)=1ms
值得注意的是,自動重裝載值計算溢出時間要加1,這是因為自動重裝載寄存器 TIMERx_CAR是從0開始計數的。
5 實現現象
將編譯好的程序下載到看板子中,可以看到LED不停閃爍。
-
mcu
+關注
關注
146文章
17123瀏覽量
350983 -
定時器
+關注
關注
23文章
3246瀏覽量
114719 -
開發板
+關注
關注
25文章
5032瀏覽量
97371 -
Cortex-M
+關注
關注
2文章
229瀏覽量
29752 -
GD32
+關注
關注
7文章
403瀏覽量
24328
發布評論請先 登錄
相關推薦
GD32對Timer定時器原理的詳細講解
GD32開發實戰指南(基礎篇) 第1章 開發環境搭建
GD32開發實戰指南(基礎篇) 第5章 跳動的心臟-Systick
GD32開發實戰指南(基礎篇) 第8章 定時器
GD32開發實戰指南(基礎篇) 第14章 內部溫度傳感器
GD32開發實戰指南(基礎篇) 第15章 低功耗
GD32開發實戰指南(基礎篇) 第16章 RTC
GD32開發實戰指南(基礎篇) 第17章 看門狗
《嵌入式-STM32開發指南》第二部分 基礎篇 - 第4章 定時器(HAL庫)






 工商網監
工商網監
評論