 基于遠程數據處理的智慧城市機器人視覺SLAM
基于遠程數據處理的智慧城市機器人視覺SLAM
室內導航是在城市環境中使用機器人和無人機的主要緊迫問題之一,特別是在沒有全球導航衛星系統(GNSS)信號的情況下。這在智慧城市的背景下尤其重要,當物聯網的各種異構設備、地面、水上和水下機器人、無人機和無人駕駛車輛組合在一個單一的信息管理系統中時,有目的地行動,自主或遠程操作。
在這方面,研究人員提出了一種通用的方法,以提高機器人和無人機使用的SLAM算法用于定位和映射的效率,其本質是使用vSLAM的優化算法以及一個或多個遠程處理服務器。最初假設在目標房間或建筑物中部署無線網絡(多個無線網絡或網狀網絡)。資源密集型數據處理“轉移”到遠程服務器(服務器),前提是機器人/無人機可以訪問它/它們(可以使用云、霧和/或邊緣服務器和框架)。這樣可以顯著減輕機器人/無人機的計算負擔,并增加其操作時間。然而,通過無線網絡將數據傳輸到服務器,其處理并將結果發送到機器人/無人機會導致導航數據(地圖更新和機器人在本地空間中的位置)的提供延遲。解決這個問題的主要方法是使用數據壓縮方法和算法,更快的標準和通信協議,以及在網絡中的代理之間自適應重新分配負載。
通常,可以區分為機器人創建遠程vSLAM系統的兩種方法(圖1)。第一種方法意味著通過無線連接將來自傳感器(視頻流)的原始數據直接發送到遠程云/霧/邊緣計算服務器。服務器執行特征檢測和提取、姿態估計、映射、3D 點云拼接、地圖優化和融合、跟蹤本地地圖、位置識別和閉環,而機器人僅負責向服務器發送視頻數據并檢索地圖關鍵幀/地圖更新。可以使用各種工具、協議、算法和數據壓縮方法(如JPEG、RVL、PNG )來減少無線信道上的負載和傳輸的數據量。該解決方案的優點是機器人/無人機的計算負擔低,并且增加了運行時間。缺點包括增加服務器上的計算負載,對無線數據傳輸通道的高要求,以及從服務器檢索機器人/無人機數據(處理的關鍵幀/地圖更新)的延遲增加。
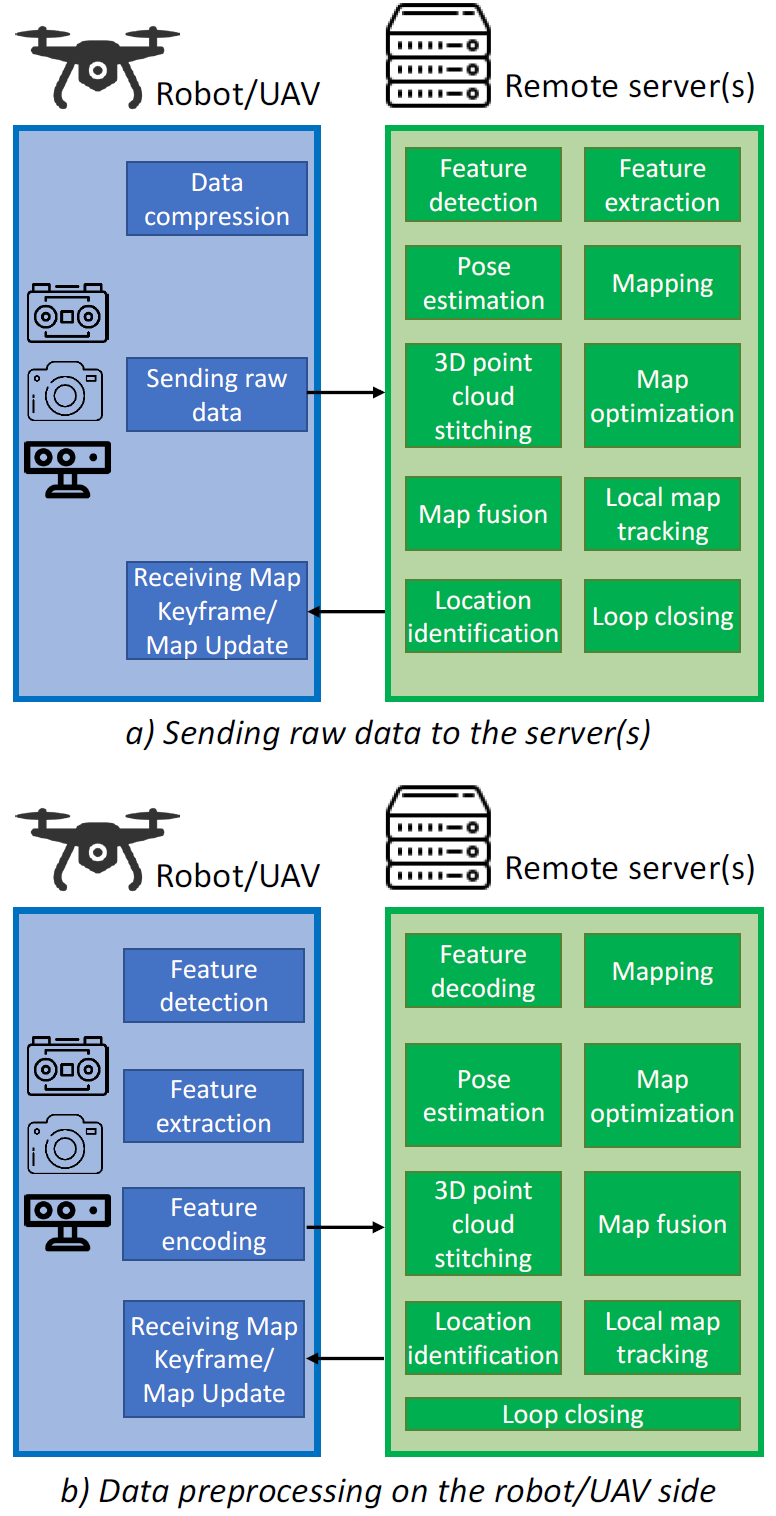
圖1創建遠程 vSLAM 系統和可視化數據處理的方法
第二種方法涉及移動設備/機器人/無人機上的數據預處理(例如,特征檢測、提取和編碼),隨后將數據傳輸到遠程服務器(云/霧/邊緣計算)進行進一步處理并獲取地圖關鍵幀/地圖更新。該方法的優點是減少了使用的網絡流量和無線帶寬要求。主要缺點是機器人/無人機的計算負載增加,從而減少了它們的運行時間。圖 2 顯示了機器人和無人機遠程 vSLAM 系統的分類。
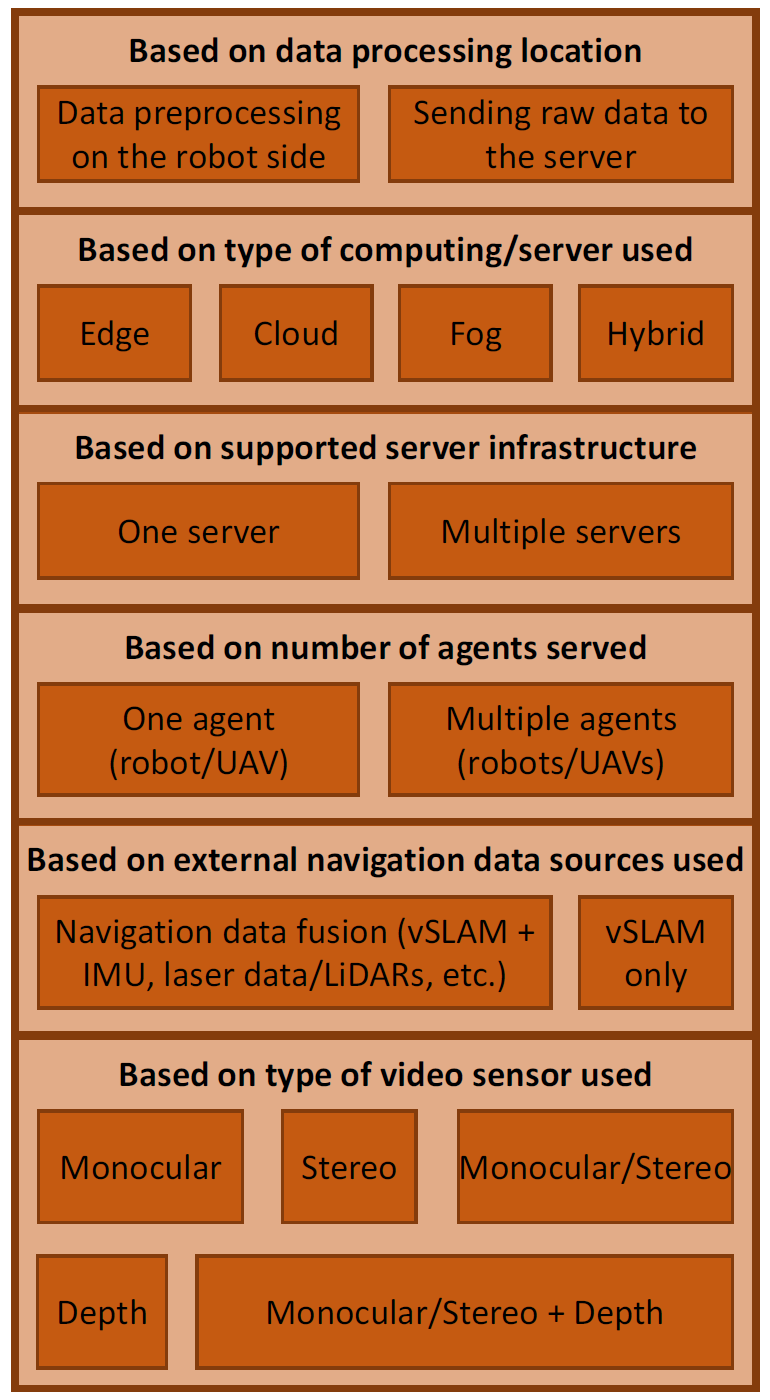
圖2遠程 vSLAM 系統的分類
通過分析,可以對智能城市環境中機器人/無人機室內導航的有前途的vSLAM系統提出以下主要要求:
①單目和 RGB-D 都必須支持作為相機輸入;
②vSLAM 應支持 640x480(480p)或1280 x 720(720p)分辨率,深度和RGB圖像至少為30FPS ;
③為了達到所需的FPS值,機器人/無人機的無線信道帶寬(上行鏈路和下行鏈路)應至少為350Mbps。因此,建議啟用對Wi-Fi 802.11 n/ac/ax/ad 和/或5G無線標準的支持。使用 Wi-Fi 時,建議使用 5 GHz 信道。此外,還應使用具有最小數據包丟失的可靠或專用網絡協議;
④ vSLAM框架應該同時具有多機器人和多服務器支持,具有自適應工作負載和計算負擔平衡,以最大程度地減少延遲。分散式多機器人系統支持也是強制性的;
⑥耗時應為20–30毫秒。最大延遲上限閾值應為40毫秒,以確保最小磁道丟失率,定位精度不應低于5cm。
室內導航仍然是智慧城市中使用機器人和無人機的緊迫問題,尤其是在GNSS信號缺失或較弱的情況下。使用SLAM和vSLAM算法以及一個或多個邊緣/霧/云數據處理服務器進行機器人/無人機的定位和映射是有前途的解決方案之一。基于對現有解決方案的分析并執行分類,可以形成一套有前途的vSLAM系統的要求,用于機器人/無人機的室內導航,包括其攝像頭輸入,分辨率,FPS數量,帶寬,無線標準,通道和協議的支持,多機器人/多服務器支持以及時間消耗。
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28607瀏覽量
207884 -
SLAM
+關注
關注
23文章
426瀏覽量
31890 -
智慧城市
+關注
關注
21文章
4273瀏覽量
97541
原文標題:基于遠程數據處理的智慧城市機器人視覺SLAM
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
機器人視覺——機器人的“眼睛”
激光導航AGV底盤定制 巡檢機器人,服務機器人,智慧物流搬運AGV
深度解析|機器人自主移動的秘密(二)
讓機器人完美建圖的SLAM 3.0到底是何方神圣?
LabVIEW 的Tripod 機器人視覺處理和定位研究
【Toybrick RK3399Pro AI開發板試用申請】機器人激光與視覺融合的導航模塊
服務機器人的視覺系統怎么設計?
機器人視覺與機器視覺有什么不一樣?
激光SLAM與視覺SLAM有什么區別?
基于視覺的slam自動駕駛
基于視覺的機器人SLAM入門實踐
使用OptiTrack光學跟蹤系統和Turtlebot機器人進行視覺SLAM定位實驗






 工商網監
工商網監
評論