 生降位的電機控制-SEW-MOVIPRO
生降位的電機控制-SEW-MOVIPRO
升降滾床和轉臺的控制多使用MOVIPRO,多采用AMA0801控制模塊.

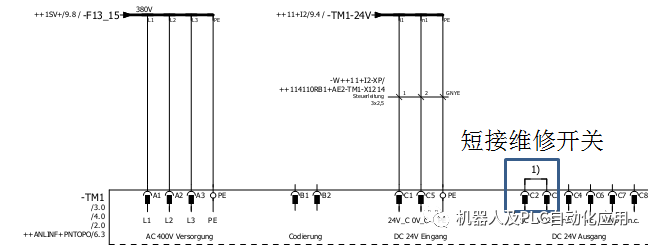
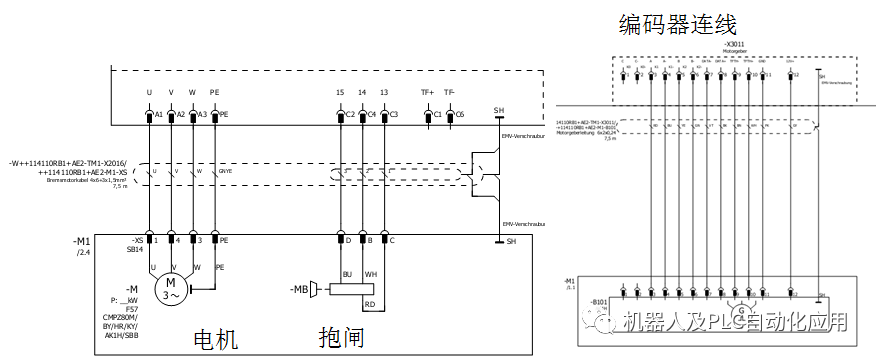
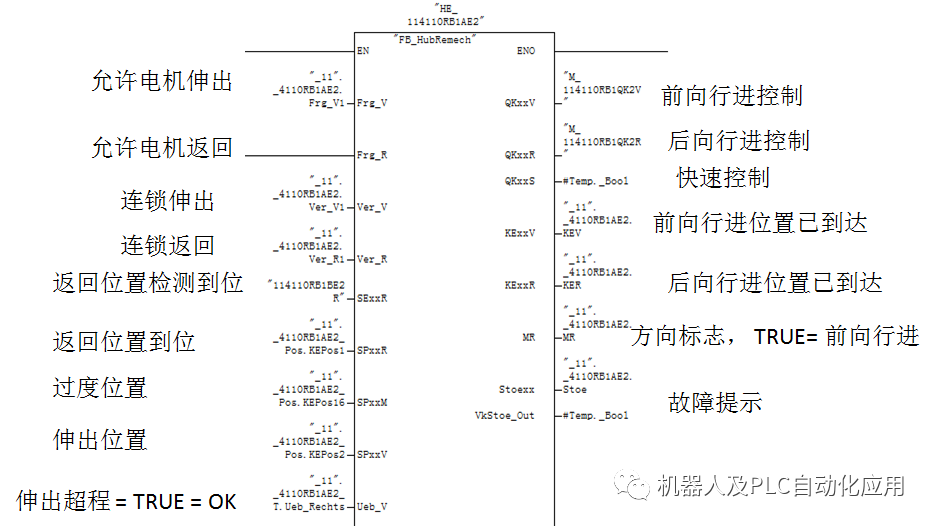
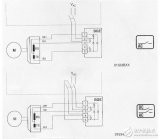
硬線圖紙介紹:
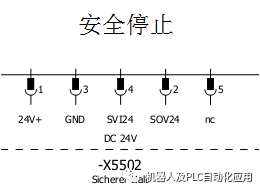
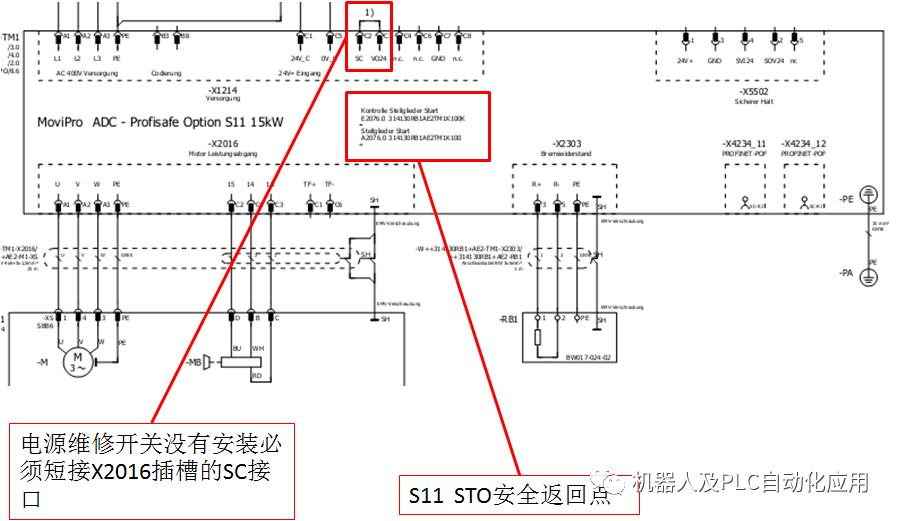
安全點的使用,E0.0STO安全使能,A0.0電源控制反饋
-----------
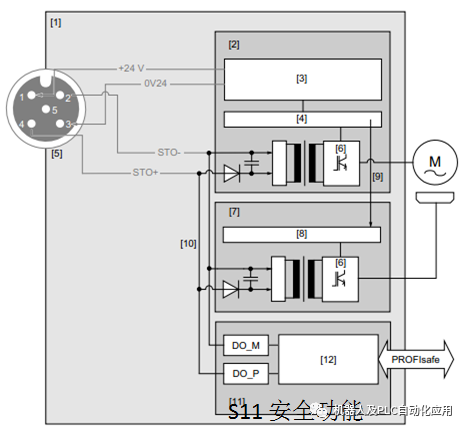
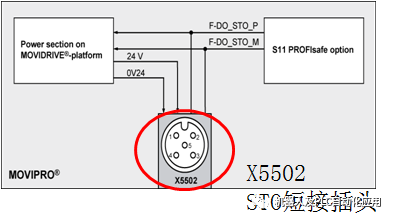
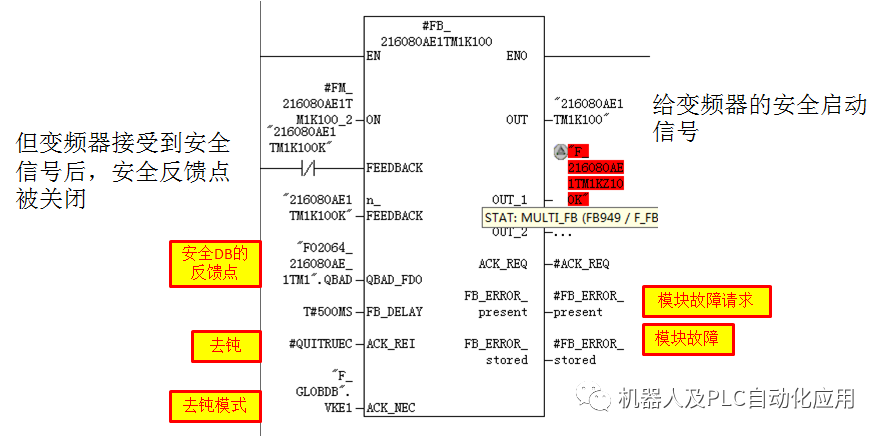
?X5520-STO安全點直接控制變頻器的功率單元以及抱閘的控制單元,接通后使抱閘和電機可以控制。
?S11安全模塊單元直接控制變頻器的功率單元以及抱閘的控制單元,接通后使抱閘和電機可以控制。
?SEW變頻器MOVIPRO的S11功能與X5520-STO安全點不能同時使用,也是直接控制電機是否得電,以及關閉電機抱閘的電。
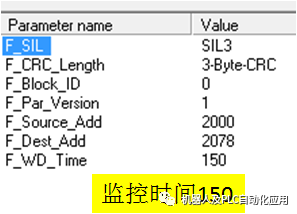
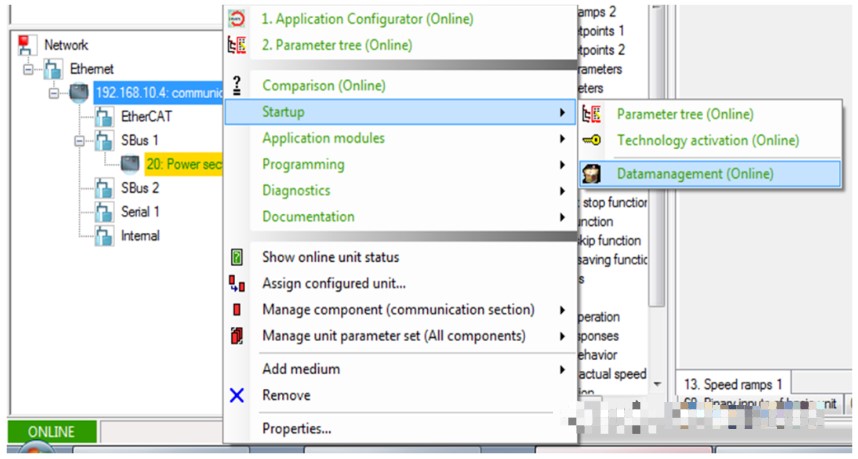
安全地址的設置:

安全地址長度2BYTE,后面2個字的長度沒用。
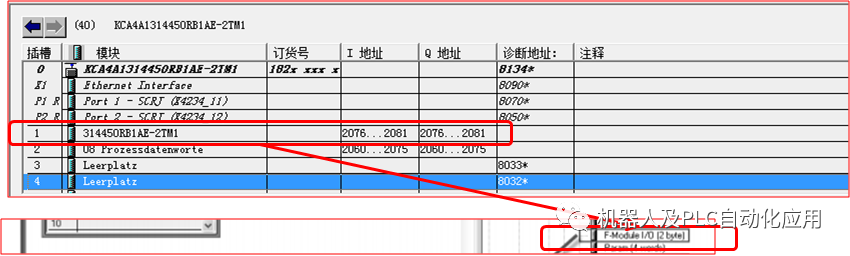

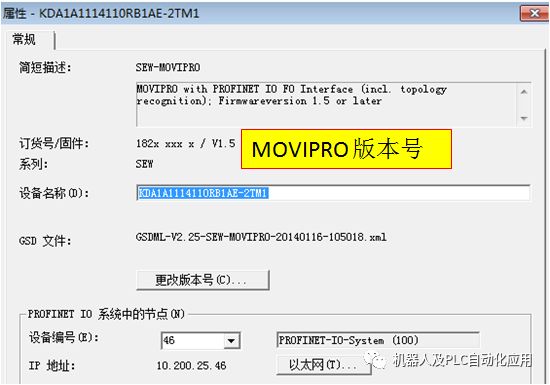
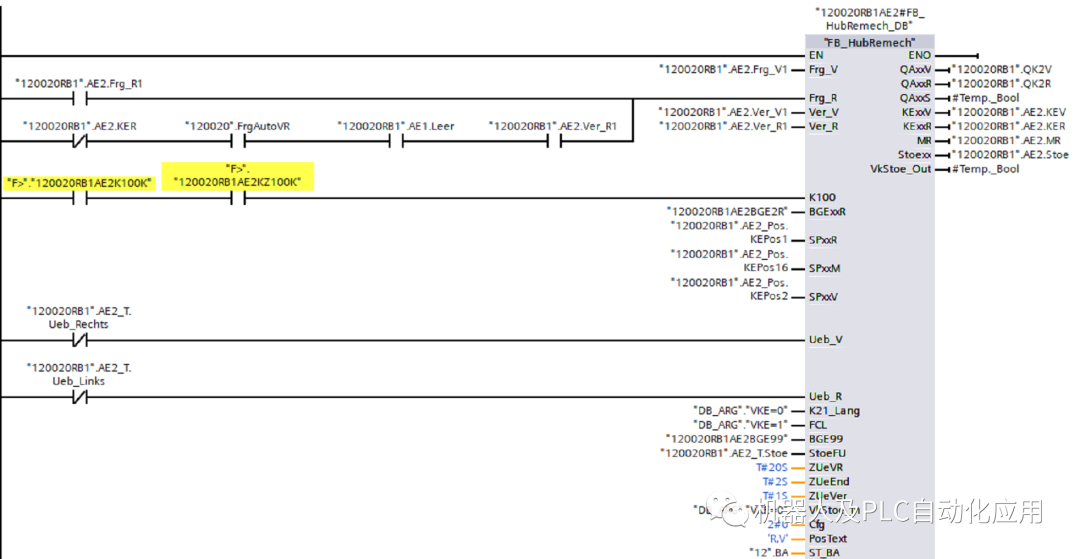
硬件組態部分:


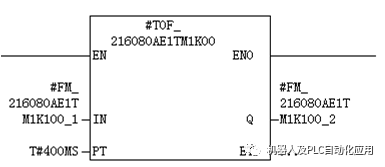
延時關斷啟動變頻器安全信號
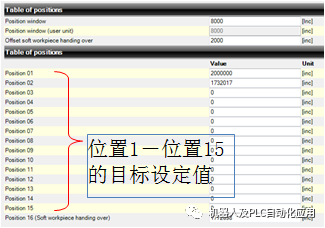
通過AMA0801的二進制設定)表格定位實現位置控制



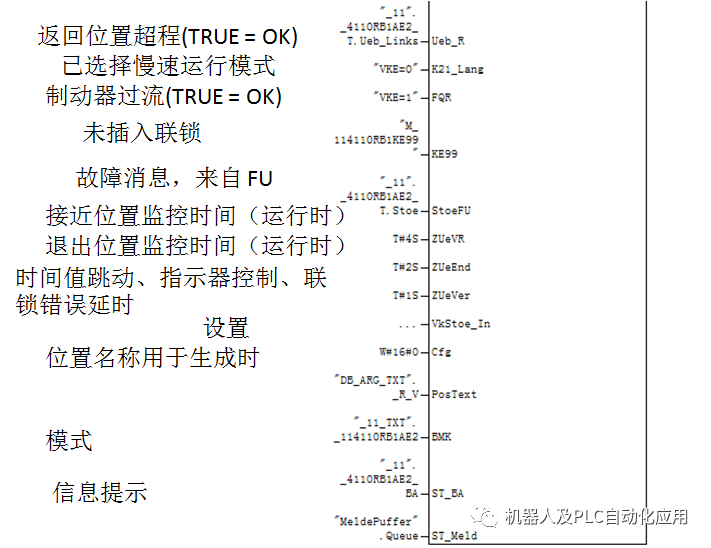
視以下錯誤類型:
? 啟用故障:如果同時掛起多個啟用(僅在“自動”模式下),則顯示錯誤消息。
? 故障,結束位置指示燈控制:如果同時有多個結束位置掛起,則顯示錯誤消息。時間延遲“ZUeVer”已到位。
? 結束位置退出而沒有控制:如果結束位置退出時沒有掛起啟用信號,則會生成錯誤消息。時間延遲“ZUeVer”已到位。
? 結束位置未退出:如果結束位置在掛起控制的情況下未退出,則會生成錯誤消息。時間延遲“ZUeEnd”已到位。
? 時間監控,向前移動:如果在“ZUeVR”監控時間內未到達位置,則會生成錯誤消息。
? 時間監控,向后移動:如果在“ZUeVR”監控時間內未到達位置,則會生成錯誤消息。
? 聯鎖故障:如果在沒有相應聯鎖條件掛起的情況下,塊上的啟用掛起,則會生成錯誤消息。時間延遲“TVer”已到位。
? 故障,到達前端位置:如果輸入為FALSE,則會生成錯誤消息。然后,驅動器只能在激活E7橋接的情況下沿相反方向縮回。
? 故障,末端位置向后到達:如果輸入為FALSE,則會生成錯誤消息。然后,驅動器只能在激活E7橋接的情況下沿相反方向縮回。
? 電機保護故障:如果輸入為FALSE,則會生成錯誤消息。
? 電機溫度故障:如果輸入為FALSE,則會生成錯誤消息。
? 聯鎖故障:如果插入聯鎖,則會生成錯誤消息(輸入為FALSE)。
表格定位模式是位置已經在AMA0801里編好,通過位置號直接調用
輸出控制:
處于“自動”模式期間,如果沒有未決故障且相應聯鎖條件已經滿足,則觸發這些輸出。
處于“ 手動” 模式期間,如果沒有未決故障且所需動作按鈕和相應聯鎖條件處于活躍狀態,則觸發
這些輸出。出現“末位位置已到達” 故障后,只能采用活躍的 E7橋接功能讓驅動裝置反向回退至
已經激活的過行程位置。
如果已經滿足“ 手動” 或“ 自動” 控制條件,驅動裝置將一直運行,直至收到停止消息或者到達末位
位置。設置停止消息時,必須讓驅動裝置停止運動時可以激活 "In_Pos" 凸輪。
驅動裝置若因故障或其它原因而停止運動,則該驅動裝置當且僅當全部行進條件都恢復后再慢
速行進至目標位置。
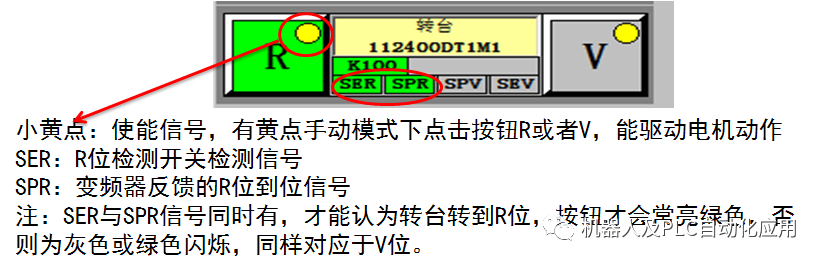
WINCC 操作按鈕的連鎖信號
dwVisuWerte1.X24 := Ver_RAND (ST_BA.K25_FrHand OR ST_BA.K26_FrAuto);
返回連鎖顯示條件:返回連鎖條件,手動工作模式,自動工作模式
dwVisuWerte1.X25 := Ver_VAND (ST_BA.K25_FrHand OR ST_BA.K26_FrAuto);
伸出連鎖顯示條件:伸出連鎖條件,手動工作模式,自動工作模式
審核編輯 :李倩
-
電機控制
+關注
關注
3534文章
1876瀏覽量
268750 -
變頻器
+關注
關注
251文章
6548瀏覽量
144515 -
安全模塊
+關注
關注
0文章
13瀏覽量
6624
原文標題:生降位的電機控制-SEW-MOVIPRO
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何將SEW變頻器數據保存到存儲卡里呢
回收SEW編碼器
徐州回收SEW編碼器公司
SEW電機結構及技術參數

SEW-MOVIPRO啟動應用程序配置程序設置步驟
SEW-movifit變頻器的VR控制應用分析

淺談SEW伺服電機的基礎知識

SEW-MOVIPRO啟動應用程序配置程序

MOVIPRO:電機初始化Starting up the motor encoder
走進SEW電機智能工廠!





 工商網監
工商網監
評論