") Rd-01雷達(dá)模組固件燒錄與可視化工具配置
Rd-01雷達(dá)模組固件燒錄與可視化工具配置
在視頻里,Rd-01雷達(dá)模組固件燒錄與可視化工具配置的步驟已經(jīng)講的非常清楚了,接下來主要是做一些功能使用的補(bǔ)充說明。
目錄
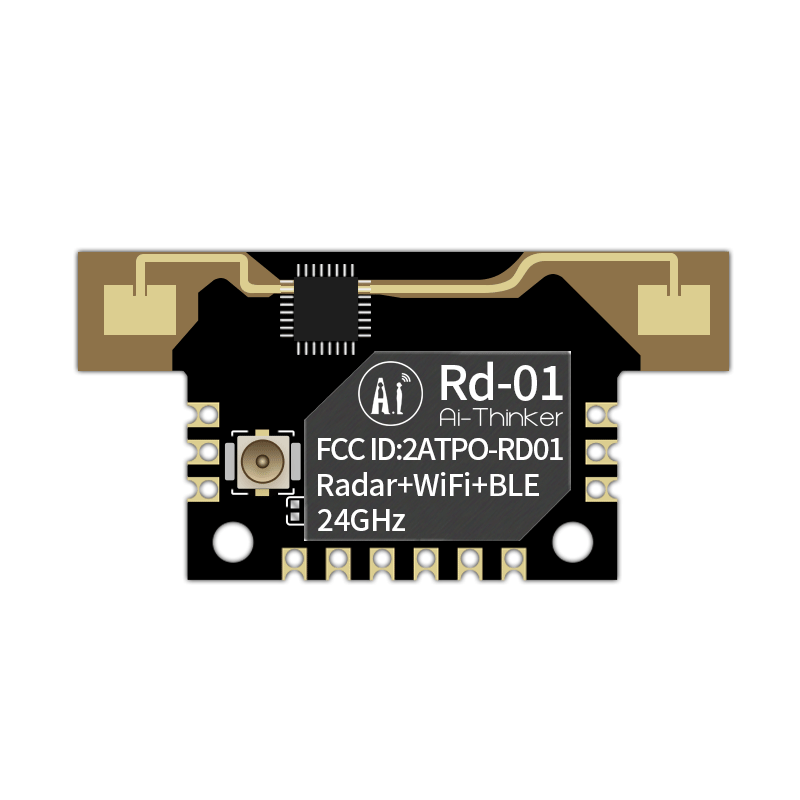
一、模組介紹
二、應(yīng)用場景
三、使用和配置
3.1 出廠固件獲取
3.2 模組接線
3.3 可視化配置工具說明
3.4 配置參數(shù)的作用
3.5 安裝方式和感應(yīng)范圍
3.6 模組實(shí)際測試效果圖
PART 01
模組介紹
Rd-01人體感應(yīng)模組的工作原理是利用FMCW調(diào)頻連續(xù)波,對設(shè)定空間內(nèi)的人體目標(biāo)進(jìn)行探測,結(jié)合雷達(dá)信號處理、精確人體感應(yīng)算法,實(shí)現(xiàn)高靈敏度的人體存在狀態(tài)感應(yīng),可識別運(yùn)動和靜止?fàn)顟B(tài)下的人體,并可計算出目標(biāo)的距離等輔助信息。

(如需購買請保存圖片打開APP掃碼操作)
本產(chǎn)品主要應(yīng)用在室內(nèi)場景,感知區(qū)域內(nèi)是否有運(yùn)動或者微動的人體,實(shí)時輸出檢測結(jié)果。最遠(yuǎn)感應(yīng)距離可達(dá)5米,距離分辨率0.75m。提供可視化的配置工具,可輕松配置感應(yīng)距離范圍、不同區(qū)間的感應(yīng)靈敏度和無人延時時間等,適應(yīng)不同的具體應(yīng)用需求。
支持 GPIO 和 UART 輸出,即插即用,可靈活應(yīng)用于不同的智能場景和終端產(chǎn)品。
PART 02
應(yīng)用場景
Rd-01人體感應(yīng)模組對運(yùn)動、微動和站立、坐臥的人體均可進(jìn)行探測識別,支持多級調(diào)參,可廣泛應(yīng)用于 AIoT 各種場景,常用類型如下:
1人體感應(yīng)燈控
感知所在空間是否有人存在,自動控制燈光,如公共場所照明設(shè)備、各類感應(yīng)燈、球泡燈等。
2廣告屏等設(shè)備的人體感應(yīng)喚醒
人來自動開啟,無人自動休眠節(jié)電,信息投放更精準(zhǔn)高效。
3生命安全防護(hù)
UV燈工作保護(hù),防止UV燈在周邊有人時開啟對人身造成傷害。危險場所自動檢測告警,防止有人進(jìn)入特定高危空間,如煤礦爆破的進(jìn)制人員進(jìn)入的高危場所。
4智能家電
房間內(nèi)長時間無人,電視空調(diào)等電器自動關(guān)閉,節(jié)能又安全。
5智能安防
對指定范圍內(nèi)有人侵入、逗留等的檢測識別。
PART 03
使用和配置
1出廠固件獲取
??下載鏈接:固件下載
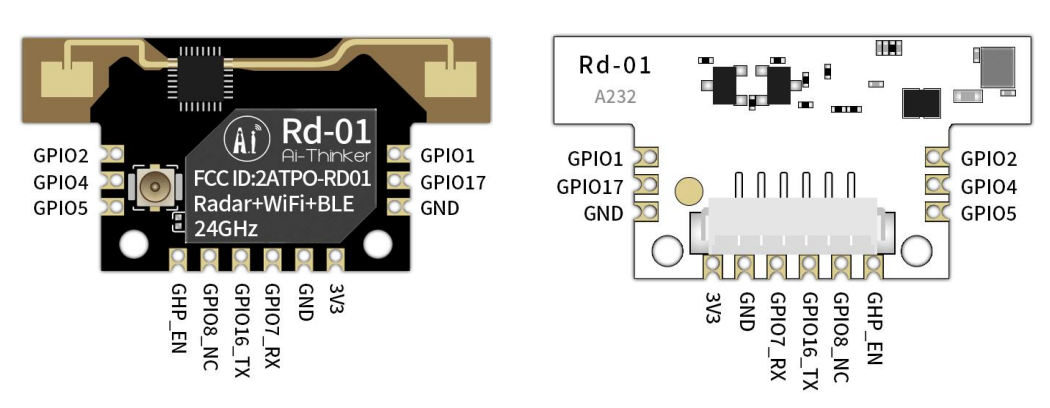
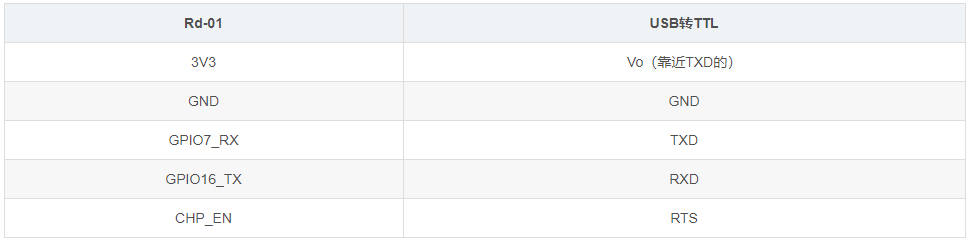
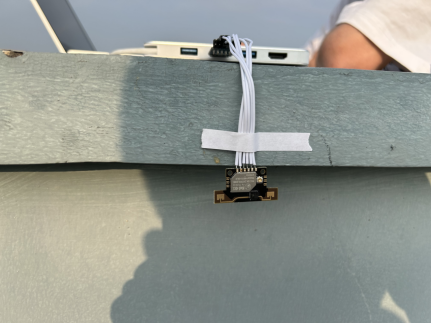
2模組接線

3可視化配置工具說明
為便于用戶快速高效的對模塊進(jìn)行測試和配置,提供了PC端的上位機(jī)配置工具,用戶可使用此工具軟件連接模塊的串口,對模塊進(jìn)行參數(shù)讀取和配置,也可接收模塊上報的探測結(jié)果數(shù)據(jù),并進(jìn)行實(shí)時的可視化展示,極大的方便了用戶的使用。
可視化配置工具:下載鏈接
可視化配置工具使用方法:
01. 用USB轉(zhuǎn)串口工具正確連接模組串口;
02. 上位機(jī)工具中選中對應(yīng)的串口號,設(shè)置波特率256000,選中工程模式,點(diǎn)擊連接設(shè)備;
03. 連接成功后,點(diǎn)擊開始按鈕,右側(cè)圖形界面會顯示檢測結(jié)果和數(shù)據(jù);
04. 在連接上后,未點(diǎn)擊開始按鈕時,或者開始后點(diǎn)擊停止,可對模式參數(shù)信息進(jìn)行讀取或設(shè)置;注意:點(diǎn)擊開始后不能對參數(shù)進(jìn)行讀取和配置,需停止后才可進(jìn)行配置。
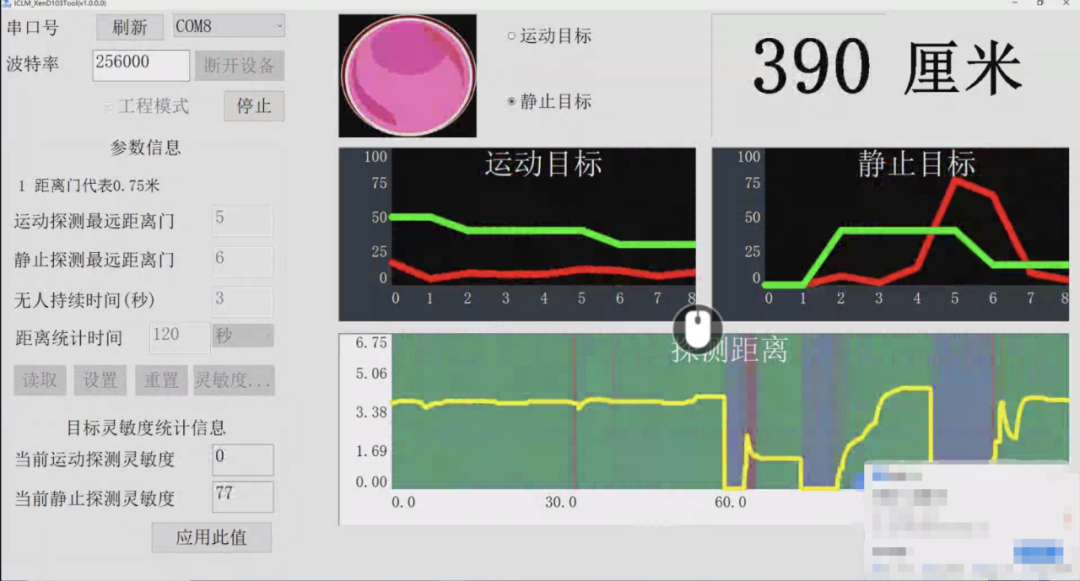
可視化配置工具的界面和常用功能如下圖
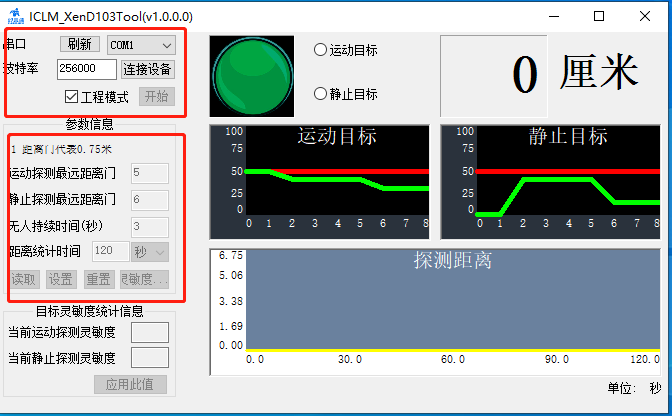
圓球為目標(biāo)狀態(tài)輸出指示:紅色代表有人為運(yùn)動目標(biāo),紫色代表有人為靜止目標(biāo),綠色代表無人。
4配置參數(shù)的作用
用戶可通過Rd-01的串口給模塊修改配置參數(shù),來適應(yīng)不同的應(yīng)用需求,配置內(nèi)容掉電不丟失。
可配置的參數(shù)包括如下幾個:
· 最遠(yuǎn)探測距離
設(shè)置最遠(yuǎn)可探測的距離,只有在此最遠(yuǎn)距離內(nèi)出現(xiàn)的人體目標(biāo)才會被探測到并輸出結(jié)果。
以距離門為單位進(jìn)行設(shè)置, 每個距離門為0.75m。
包括運(yùn)動探測最遠(yuǎn)距離門和靜止探測最遠(yuǎn)距離門,可設(shè)置范圍為1~8,例如設(shè)置最遠(yuǎn)距離門為2,則只有在1.5m內(nèi)有人體存在才會有效探測到并輸出結(jié)果。
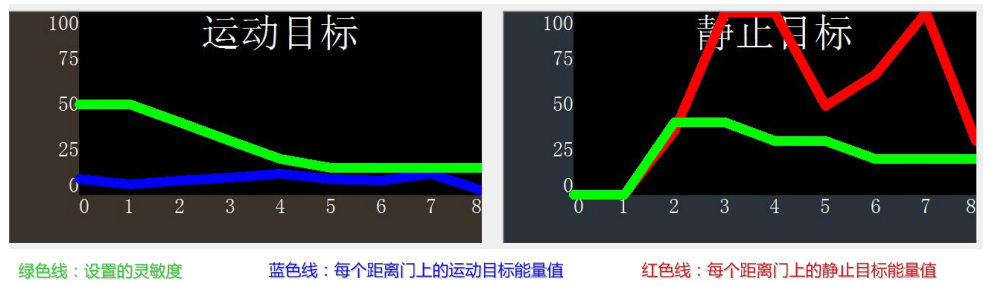
·靈敏度
探測到的目標(biāo)能量值(范圍0~100)大于靈敏度值時才會判定為目標(biāo)存在,否則忽略。
靈敏度值可設(shè)置范圍0~100。每個距離門可獨(dú)立設(shè)置靈敏度,即可對不同距離范圍內(nèi)的探測進(jìn)行精準(zhǔn)調(diào)節(jié),局部精準(zhǔn)探測或?qū)μ囟▍^(qū)域干擾源的過濾。
另外如果將某個距離門的靈敏度設(shè)置為100時,可達(dá)到不識別此距離門下目標(biāo)的效果。例如將距離門3和距離門4的靈敏度設(shè)置為20,其他距離門的靈敏度都設(shè)置為100,則可實(shí)現(xiàn)僅對距離模塊2.25~3.75m范圍內(nèi)的人體進(jìn)行探測。
·無人持續(xù)時間
雷達(dá)在輸出從有人到無人的結(jié)果中,會持續(xù)一段時間上報有人,若在此時間段雷達(dá)測試范圍內(nèi)持續(xù)無人,雷達(dá)上報無人;若在此時間段雷達(dá)檢測到有人,則重刷新此時間,單位秒。相當(dāng)于無人延時時間,人離開后,保持無人超過此持續(xù)時間后才會輸出狀態(tài)為無人。
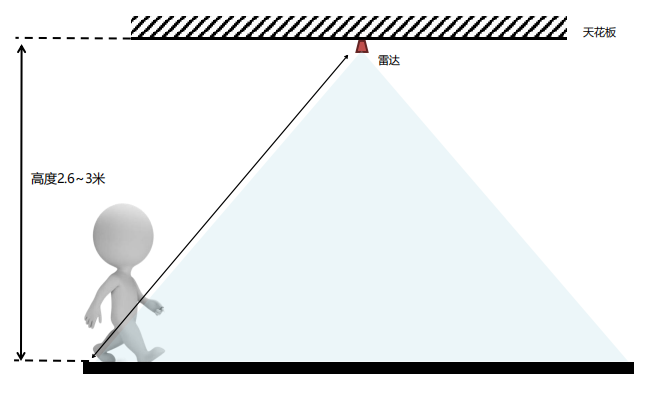
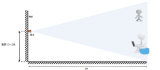
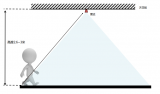
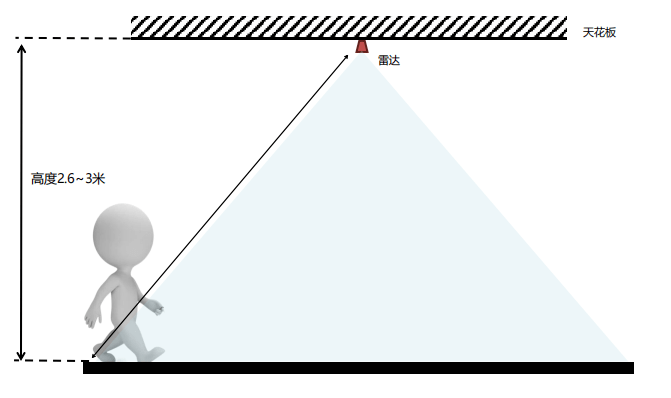
5安裝方式和感應(yīng)范圍
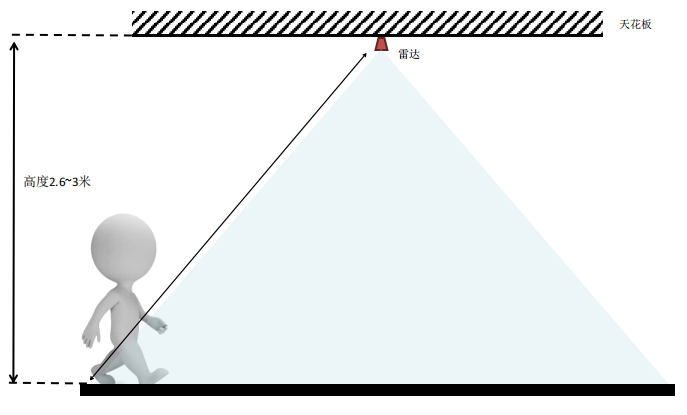
掛頂安裝示意圖
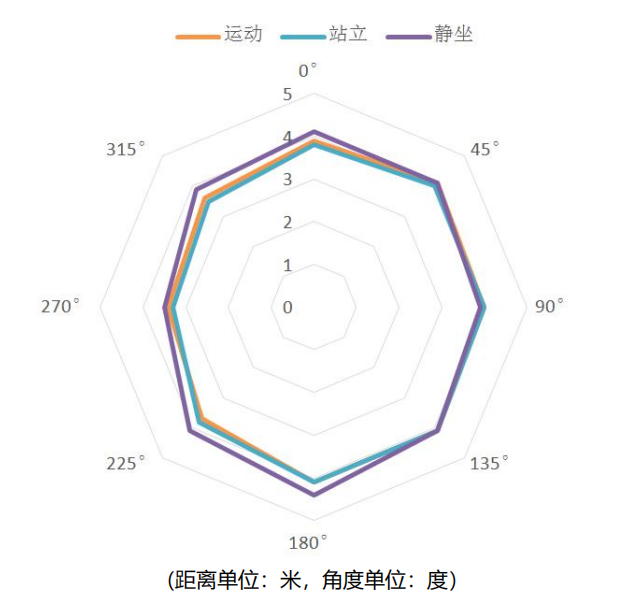
探測范圍示意圖(掛頂高度3米)
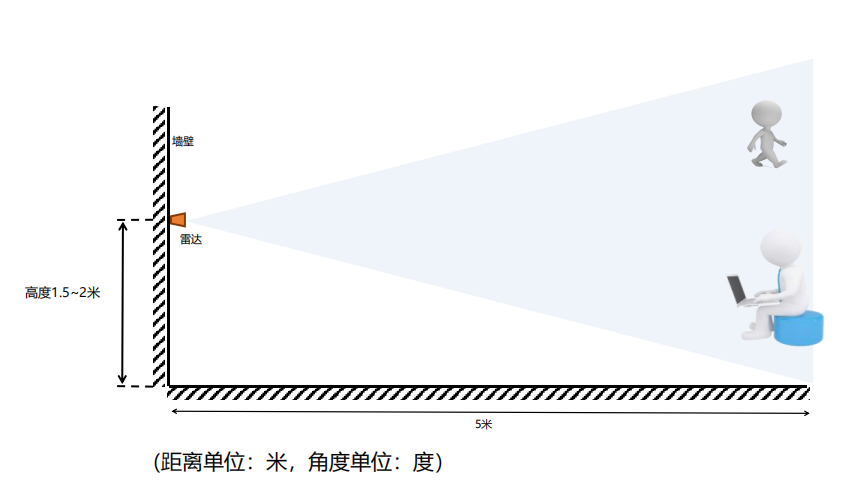
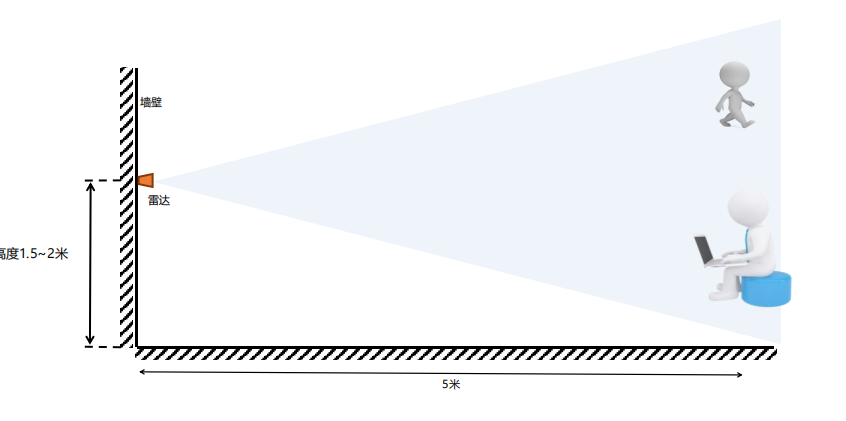
掛壁安裝示意圖
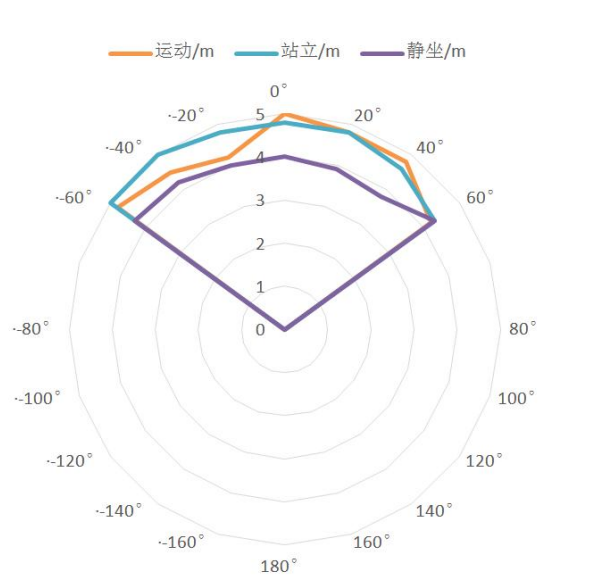
探測范圍示意圖(掛壁高度1.5米)
6模組實(shí)際測試效果圖

審核編輯:湯梓紅
-
雷達(dá)
+關(guān)注
關(guān)注
50文章
2930瀏覽量
117465 -
uart
+關(guān)注
關(guān)注
22文章
1235瀏覽量
101354 -
可視化
+關(guān)注
關(guān)注
1文章
1194瀏覽量
20933 -
GPIO
+關(guān)注
關(guān)注
16文章
1204瀏覽量
52052 -
燒錄
+關(guān)注
關(guān)注
8文章
259瀏覽量
35561
原文標(biāo)題:拿來就能用 | Rd-01雷達(dá)模組固件燒錄與可視化工具配置(附視頻)
文章出處:【微信號:安信可科技,微信公眾號:安信可科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
能做數(shù)據(jù)治理的數(shù)據(jù)可視化工具,又快又靈活
這樣選數(shù)據(jù)可視化工具,更能選到適用的
mongodb可視化工具如何使用_介紹一款好用 mongodb 可視化工具
建議收藏的20款實(shí)用的數(shù)據(jù)可視化工具
數(shù)據(jù)可視化工具的圖表主要分為哪些
安信可Rd-01模組雷達(dá)技術(shù)解析

安信可進(jìn)軍雷達(dá)領(lǐng)域 24G人體存在感應(yīng)雷達(dá)模組Rd-01面世
安信可Ai-Thinker Rd-01人體存在感應(yīng)模組酒店場景應(yīng)用方案

一分鐘上手安信可雷達(dá)模組Rd-03

安信可Rd-01人體感應(yīng)模組上手教程來啦,享受毫米波雷達(dá)帶來的極致體驗
安信可雷達(dá)模組Rd-01燒錄操作說明

安信可雷達(dá)模組Rd-01燒錄指南





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論