 機器視覺成像系統綜述
機器視覺成像系統綜述
1. 成像系統模型

圖1:成像系統的簡化模型
機器視覺的成像系統的簡化模型,如圖1所示。 光學成像系統對現實世界中的可見光、紅外線、X射線等實施某種轉換T(x,y),將物理量轉換為電信號,再經圖像采集設備采樣、量化后生成數字圖像。
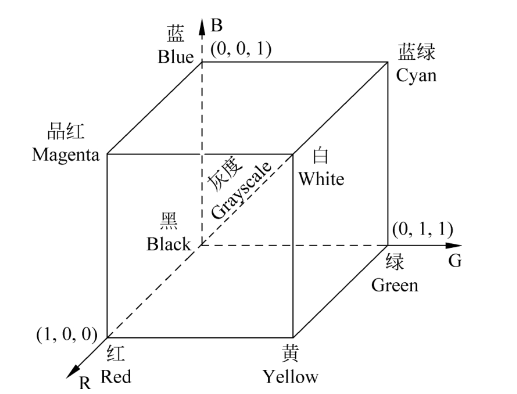
圖2:RGB色彩模型
圖像是指所有具有視覺效果的畫面,它是對客觀對象的一種相似的、生動的描述。 根據色彩不同,圖像可以分為彩色圖像和黑白(灰度)圖像。 色彩可以分解為不同強度RGB基本色的組合,這種表示色彩的方式稱為RGB顏色模型或RGB色彩空間,如圖2所示。 相應地,可以將彩色圖像的研究分解為對RGB分量所對應的灰度圖像的研究。
圖像根據記錄方式的不同可分為模擬圖像和數字圖像兩大類。 如果將灰度圖像看作二維空間上的光強度函數f(x,y),則模擬灰度圖像就是對該空間上光強度幅值f變化的連續記錄。 當(x,y)和f為離散、有限的數值時,光強度幅值f的變化將以類似矩陣的形式被記錄,此時所記錄的圖像就稱為數字圖像,而所記錄的值對應在圖像中的每個點稱為像素(pixel),橫向及縱向像素的個數稱為圖像的分辨率(image resolution),如圖3所示。 機器視覺系統中提及的圖像通常是數字圖像。
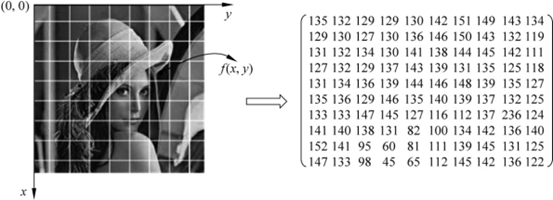
圖3:數字圖像及其像素
除了圖像分辨率外,系統分辨率和像素分辨率也是機器視覺系統設計時較常見的參數。 它們通常與客戶對機器視覺系統的需求關系最為密切,是選擇相機和鏡頭的重要依據。
系統分辨率指成像系統可以識別出監測目標的最小細節或最小特征,例如, “要求系統能檢測0.1mm的目標”,“要求系統測量精度達到0.01mm”之類的要求一般都和系統分辨率相關。
像素分辨率指為了表示檢測目標所需要的像素數。 一般情況下,可以根據客戶對檢測目標中最小特征的要求來確定最小像素分辨率。
如果將整個圖像看作周期為最小特征大小的周期信號,則根據奈奎斯特采樣定律,必須對信號每個周期采樣2個點以上,才能完整恢復該信號。 因此如果客戶沒有特別要求,常用至少兩個像素來代表檢測目標中的最小特征。
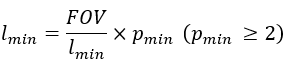
圖像傳感器應具備的最小像素分辨率常通過下面的公式計算:

上式中,R最小為最小像素分辨率,L。.max為檢測目標的最大長度,l最小為檢測目標的最小特征長度(視覺系統的分辨率),p最小為表示最小特征的像素數,無特別要求時P最小=2。
視場(Field of View, FOV)指成像系統中圖像傳感器可以監測到的最大區域。 在機器視覺系統設計時,考慮到一般都會使被檢測目標盡量填滿整個視場,因此常用視場大小代替目標的最大長度L。.max來計算視覺系統的像素分辨率。
如果橫縱方向上視場大小為[FOVh,視場在],檢測目標的最小特征的大小為[lhl在],則圖像傳感器應具有的最小像素分辨率為

機器視覺系統常用使用配備各種鏡頭系統的工業CCD/CMOS相機作為成像系統。 相機鏡頭到所檢測目標的距離(稱為工作距離,相當于物距)相對于相機焦距可近似認為是無窮遠。 若將其帶入高斯成像公式,可得出此時相機像距近似等于其焦距,也就是說相機成像在焦平面上。 據此,可以將鏡頭系統抽象為類似小孔成像的簡化模型,如圖3所示。
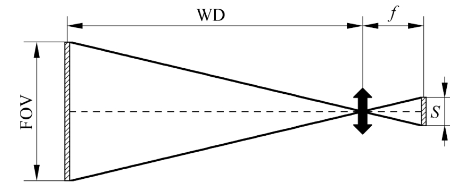
圖3:鏡頭的小孔成像簡化模型
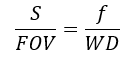
根據該簡化模型,可以得出機器視覺系統圖像傳感器尺寸S(傳感器平面某個方向上的長度)、視場FOV、工作距離WD及鏡頭焦距f之間的約束關系:
此時,鏡頭的放大率M則可以等效為:

如果進一步將前述最小像素分辨率的計算公式與該約束關系結合(用視場FOV代替目標的最大長度L。.max),則可以得出以下成像系統簡化模型的參數約束關系:

該公式所顯示的參數間的相互約束關系是機器視覺系統設計和搭建部署時系統設計和設備選型的基礎。
實際操作中,傳感器尺寸S可以通過查詢相機的技術規范獲知,焦距f、工作距離WD直接由所選擇的鏡頭決定。
在已知這些參數時,可以很容易地計算出視場FOV。
相機的像素分辨率由其有效像素區域(即傳感器尺寸)決定,通常用橫向和縱向有效像素數來表示(如768×576)。
為機器視覺系統所選擇的相機像素分辨率,必須大于或等于按照項目需求(包括對最小特征尺寸l最小和用于表示最小特征的像素數p最小的要求)計算出的最小像素分辨率R最小。
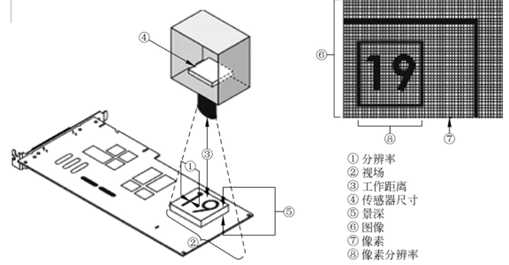
圖4:機器視覺成像系統中的相關參數
2. 鏡頭
在機器視覺系統中,鏡頭的質量和技術指標直接影響成像系統的性能,合理地選擇和安裝鏡頭是決定機器視覺成像系統成敗的關鍵。
與鏡頭相關的主要技術參數有鏡頭分辨率、焦距、最小工作距離、最大像面、視場/視場角、景深、光圈和相對孔徑及其安裝接口類型等。
鏡頭分辨率
通過拍攝正弦光柵,研究鏡頭每毫米內能分辨的線對數,就可以獲知鏡頭的分辨率。 鏡頭分辨率越高,則說明其每毫米內能分辨的線對數越多。
對于機器視覺系統設計來說,只需要查詢鏡頭參數表即可獲知其分辨率。
鏡頭的空間分辨率、相機的像素分辨率、相機的空間分辨率、系統的空間分辨率和系統的分辨率是幾個極容易混淆的概念。
相機的像素分辨率是指相機傳感器上縱橫方向上的像素數;
相機的空間分辨率卻表示它的空間極限分辨能力。 根據前述相機奈奎斯特定律,相機要能恢復空間圖像,必須至少使用2個像素來表示圖像的最小單元。 可以通過像素的物理大小來計算相機的空間分辨率。 例如,某相機的像素物理大小為8.4μm×9.8μm,則相機在橫縱方向上的空間分辨率為

系統的空間分辨率取鏡頭和相機空間分辨率的最小值。 例如,在上述例子中,最好選擇空間分辨率大于59.53lp/mm的鏡頭。
如果鏡頭的空間分辨率比相機的空間分辨率小,則說鏡頭可以分辨單個線對的能力要比相機識別的單個線對的能力弱。 也就是說極限情況下,鏡頭傳給相機的圖像不清晰,因此只有鏡頭的空間分辨率大于相機的空間分辨率時,才能確保成像系統的空間分辨率最佳。
系統分辨率,在機器視覺系統設計時,并不是指系統對線對的空間極限分辨力,而是指系統可以識別檢測目標中最小特征的能力。
(上式中,分母應為R_min) 例如,如果成像系統的水平方向上視場為0.9m,相機在水平方向上的像素數為720,則代表最小特征的像素數為2時,系統分辨率為2.5mm。
焦距
焦距是指無限遠處目標在鏡頭的像方所成像位置到像方主面的距離。 焦距體現了鏡頭的基本特性:即在不同物距上,目標的成像位置和成像大小由焦距決定。 市面上常見的鏡頭焦距大小包括6mm、8mm、12.5mm、25mm以及50mm等。 對機器視覺成像系統來說,工作距離就是成像系統中所說的物距。 由于視覺成像系統模型的假定條件是工作距離相對于鏡頭焦距為無限遠,因此一般在鏡頭的產品參數中都會說明其最小工作距離。 當相機在小于該最小工作距離的環境下工作時,就會出現圖像失真,影響機器視覺系統的可靠性。
最大像面、視場/視場角
最大像面、視場/視場角都是用來衡量鏡頭成像范圍的關鍵參數。
最大像面是指鏡頭能支持的最大清晰成像范圍(常用可觀測范圍的直徑表示),超出這個范圍所成的像對比度會降低而且會變得模糊不清。
最大像面是由鏡頭本身的特性決定的,它的大小也限定了鏡頭可支持的視場的大小。
鏡頭的視場就是鏡頭最大像面所對應的觀測區域。 視場角等于最大像面對應的目標張角。
通常,在遠距離成像系統中,例如望遠鏡、航拍鏡頭等場合,鏡頭的成像范圍均用視場角來衡量。 而近距離成像中,常用實際物面的直徑(即幅面)來表示。
由于機器視覺成像系統中的傳感器多制作成長方形或正方形,因此鏡頭的最大像面常用它可以支持的最大傳感器尺寸(單位為英寸,1英寸約為2.54cm)來表示。 相應地,鏡頭的視場也可以用最大像面所對應的橫向和縱向觀測距離或視場角來表示,如圖5所示。
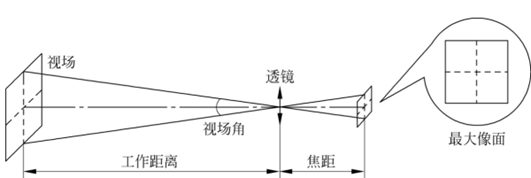
圖5:機器視覺系統中鏡頭的視場和最大像面
一般來說,鏡頭的失真(畸變)會隨著焦距的減小(或視場角的增大)而增大,因而在構建機器視覺系統(特別是精確測量系統)時,一般都不會選擇焦距小于8mm或視場角很大的鏡頭。
鑒于鏡頭能清楚成像的范圍受到最大像面的限制,因此在為相機選配鏡頭時,要特別注意相機傳感器與鏡頭可支持最大傳感器之間的關系。 一般來說,必須確保所選鏡頭可支持的最大傳感器尺寸大于或等于相機的傳感器尺寸。 這樣做的另一個主要原因是為了避免漸暈(Vignetting)現象的發生。
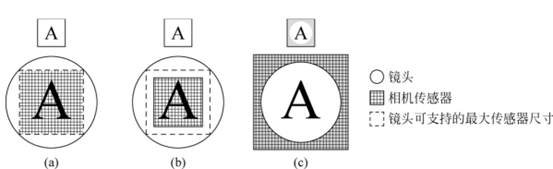
圖6:鏡頭大小與相機傳感器尺寸不同時的成像情況
如圖6(c)所示,如果相機傳感器的尺寸大于鏡頭可支持的最大傳感器尺寸時,所生成的圖像就會形成類似隧道的效果,該現象稱為漸暈現象。 漸暈現象會增加機器視覺系統的開發難度,因此應盡量避免。 圖6中的(a)、(b)分別顯示了在鏡頭可支持的最大傳感器尺寸等于或大于相機的傳感器尺寸時視覺系統的成像情況,這兩種情況下機器視覺系統均能正常工作。
景深
景深也是一個與鏡頭和成像系統關系十分密切的參數,它是指在鏡頭前沿著光軸所測定的能夠清晰成像的范圍,如圖7所示。 在成像系統的焦點前后,物點光線呈錐狀開始聚集和擴散,點的影像沿光軸在焦點前后逐漸變得模糊,形成一個擴大的圓,這個圓稱為彌散圓(circle of confusion)。 若這個圓形影像的直徑足夠小(離焦點較近),成像會足夠清晰,如果圓形再大些(遠離焦點),成像就會顯得模糊。 當在某個臨界位置所成的像不能被辨認時,則該圓就被稱為容許彌散圓(permissible circle of confusion)。 焦點前后兩個容許彌散圓之間的距離稱為焦深。 在目標物一側,焦深對應的范圍就是景深。
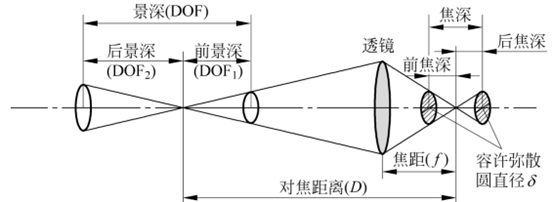
圖7:焦深與景深
景深的計算公式如下:
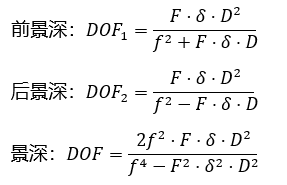
其中,δ為容許彌散圓的直徑,f為鏡頭焦距,D為對焦距離,F為鏡頭的拍攝光圈(aperture)值。
從景深公式可以看出,后景深要大于前景深,而且景深一般隨著鏡頭的焦距、光圈值、對焦距離(可近似于拍攝距離)的變化而變化。
在其他條件不變時:
(1)光圈越大(光圈值F越小),景深越小; 光圈越小(光圈值F越大),景深越大。
(2)鏡頭焦距越長,景深越小; 焦距越短,景深越大。
(3)距離越遠,景深越大; 距離越近,景深越小。
在檢測目標的高度在一定范圍內可能變化的情況下,選擇合適的景深,對于機器視覺系統的穩定性尤為重要。
對比度
對比度用于表示圖像在亮度層級上的差異(圖像分辨率表示圖像在空間上的差異)。 它是一幅圖像中明暗區域最亮I聰明和最暗I黑暗兩個不同亮度層級之間的差異,常用下面公式計算:
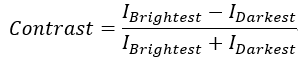
根據該公式,當明暗度之間的差異越大時(對比度的值趨于1),對比度越大,圖像越清晰醒目,色彩也越鮮明艷麗; 當明暗度之間的差異越小時(對比度的值趨于0),對比度越小,整個圖像的清晰度、細節、灰度層次表現就會越差。
通常如果要處理的目標涉及較多細節,就需要盡可能調整光圈獲取較高對比度的圖像,減少后期機器視覺軟件開發的難度。 如果光圈調整還不能達到目的,就需要通過調整光源或相機增益來提高對比度。
畸變
實際中,鏡頭自身特性與理想成像系統模型總是有差距的,鏡頭特性的不完美性對成像系統有較大影響。 例如,在使用廣角鏡頭或變焦鏡頭的廣角端時,成像畫面常呈桶形膨脹狀態,稱這種情況為桶形畸變(barrel distortion)。 而在使用長焦鏡頭或變焦鏡頭的長焦端時,成像畫面常會向中間收縮,稱這種情況為枕形畸變(pincushion distortion)。 還有些鏡頭產生的畸變是圖像中心處接近桶形失真,但由中心向邊緣逐漸過渡到枕形失真,這時圖像上半部分極其像八撇胡須,故而稱為須形畸變(mustache distortion)。 這些由于鏡頭自身特性引起的畸變統稱為鏡頭畸變(lens distortion),如圖8所示。
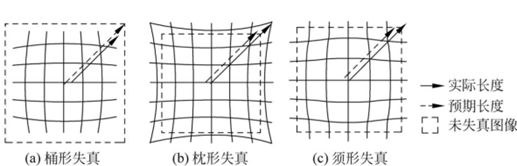
圖8:鏡頭畸變
鏡頭相對于被測目標的安裝位置和角度也影響成像系統的質量。 例如在相機未能垂直于被測目標安裝時,就會產生透視畸變(perspective distortion)。 在這種情況下,所成圖像遵循透視規律,即離鏡頭越近,所成圖像越大,反之越小,如圖9所示。
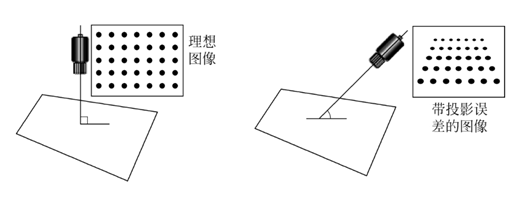
圖9:投影失真
若要使用搭建好的機器視覺系統進行準確測量控制,必須綜合考慮機器視覺成像系統的多種畸變因素,實時地把圖像中像素包含的信息映射到真實世界中去。 這就需要事先獲知成像系統的圖像像素與真實世界坐標系之間的映射關系。
通過各種流程和方法,尋找這個對應關系的過程稱為系統空間校準(標定)。
接口
鏡頭與相機之間的物理接口必須匹配才能安裝在一起搭配使用。 常見的接口標準有C接口(C-mount)、CS接口(CS-mount)和F接口(F-mount)。
在機器視覺領域,目前C和CS接口的鏡頭及相機占主導地位,它們的唯一區別是背焦距不同,如圖10所示。 F接口常用于高像素數的線掃描相機(2048像素以上),獲取比C和CS接口鏡頭更大的圖像。
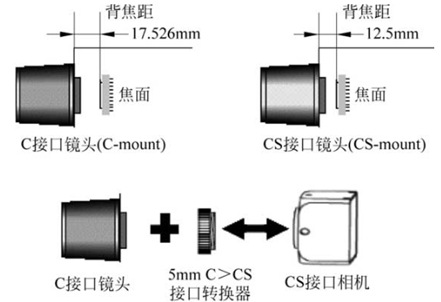
圖10:C與CS接口
C接口鏡頭的后焦距是17.526mm,CS接口鏡頭后焦距則為12.5mm,因此,只要為C接口鏡頭配備一個5mm的擴展管(轉換器),就可以得到CS接口的鏡頭,但CS鏡頭卻不能與C接口的相機搭配使用。 C接口是鏡頭的國際標準,因此有很多C接口的鏡頭可供選擇。
鏡頭與相機連接之初,觀測目標的成像面不一定恰巧與相機傳感器的感光面重合。 為了得到清晰的影像,就需要調整鏡頭成像面的位置,使之恰巧落在相機傳感器的感光面上,這個過程稱為調焦。 調焦過程并不改變鏡頭或鏡頭組自身的焦距(或改變很小),而只是通過沿著光軸前后移動整個鏡頭或只微小調節鏡頭組中某一個透鏡的位置,使鏡頭像面和相機傳感器感光面重合。 幾乎所有鏡頭筒上都有一個調焦環,日常生活中,轉動調焦環以獲取清晰圖像的過程實際上就是通過機械裝置調焦的過程。
與調焦不同,變焦是指在保證像面不動的前提下,通過移動鏡頭組內透鏡的相對位置使整個鏡頭系統的焦距發生較大變化。
除了光學元件,鏡頭設備一般還包括固定光學元件的零件(如鏡筒、透鏡座、壓圈、連接環等)、鏡頭調節機構(如光圈調節環、調焦環等)和鏡頭連接機構等。 高級點的鏡頭上有時還有自動調整光圈、自動調焦或光強度感測等電子機構。 這些設備與光學系統協同工作,可以確保鏡頭和相機構成的成像系統為視覺系統工作提供良好的圖像信號基礎。
3. 為機器視覺項目選擇鏡頭和相機的簡化流程
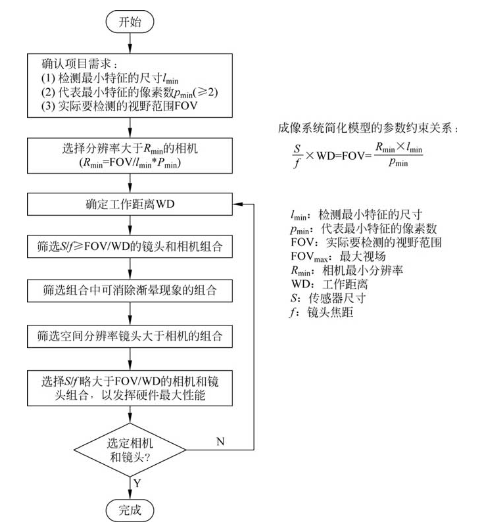
圖11:選擇相機和鏡頭的簡化流程
如果事先既未確定相機又未確定鏡頭,則需要先了解項目工作環境對相機安裝(工作距離)、要檢測的最大范圍(視場)、最小特征的尺寸和代表它的像素數的要求,然后根據這些條件來計算應使用何種鏡頭或相機。
審核編輯:湯梓紅
-
紅外線
+關注
關注
14文章
624瀏覽量
56506 -
機器視覺
+關注
關注
162文章
4433瀏覽量
121099 -
模型
+關注
關注
1文章
3406瀏覽量
49457 -
成像系統
+關注
關注
2文章
201瀏覽量
14023 -
光學成像
+關注
關注
0文章
87瀏覽量
10188
原文標題:機器視覺成像綜述
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論