 KUKS -ANOUT:循環說明模擬輸出端
KUKS -ANOUT:循環說明模擬輸出端
(每隔 12 ms 一次)循環寫入一個模擬輸出端。ANOUT 將觸發預進停止。機器人控制系統擁有 32 個模擬輸出端 ($ANOUT[1] … $ANOUT[32])。
1. 同時最多允許有四條 ANOUT ON 指令。
2. 所有用于 ANOUT 指令中的變量必須已在數據列表中進行了聲明 (局部或在 $CONFIG.DAT 中)。
$ANOUT[…] 可通過 -1.0 至 +1.0 之間的值加以說明。實際產生的電壓取決于模擬模塊的設置。如嘗試將電壓值設置成超出值域范圍,則機器人控制系統顯示以下信息:限制 { 信號名稱 }
開始循環寫入:
ANOUT ON 信號名稱 = 系數 * 調節項 <±偏量>
例:
在聲明部分給該模擬輸出端分配一個任意的名稱,在該情況下為 GLUE。粘結劑量取決于當前的軌跡速度 (= 系統變量 $VEL_ACT)。此外,應提前 0.5 秒發出輸出信號。最低電壓應為 3 V。(使用其電壓從 +10 V 至 -10 V 的模
塊。)
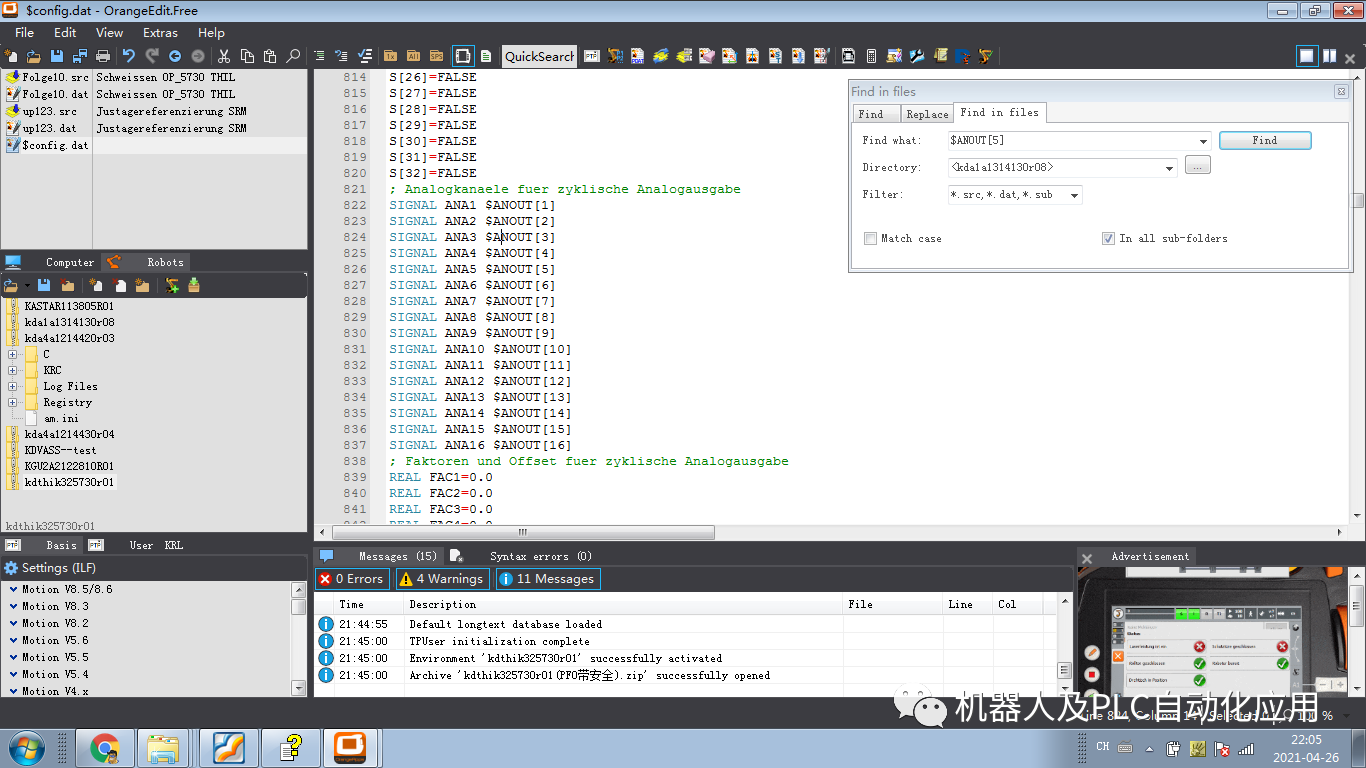
SIGNAL GLUE $ANOUT[5]
...
ANOUT ON GLUE = 0.5 * $VEL_ACT DELAY=-0.5 MINIMUM=0.30
循環模擬輸出以 ANOUT OFF 結束:
ANOUT OFF GLUE
VASS標準中KUKA機器人中的應用:
在config.dat中聲明
在涂膠機器人程序中使用的模擬量輸出:
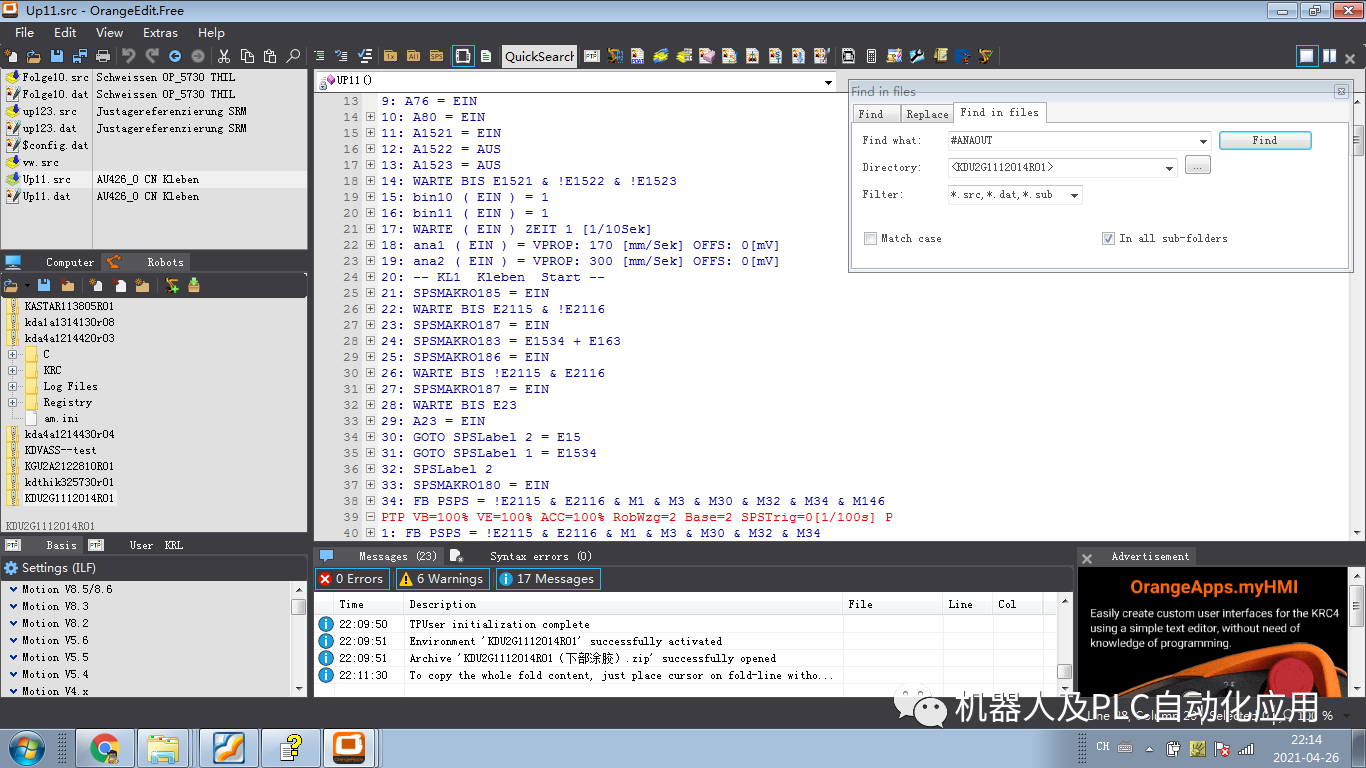
ana1 ( EIN ) = VPROP: 170 [mm/Sek] OFFS: 0[mV]
VW(#ANAOUT,TRUE,2,1,170,0)
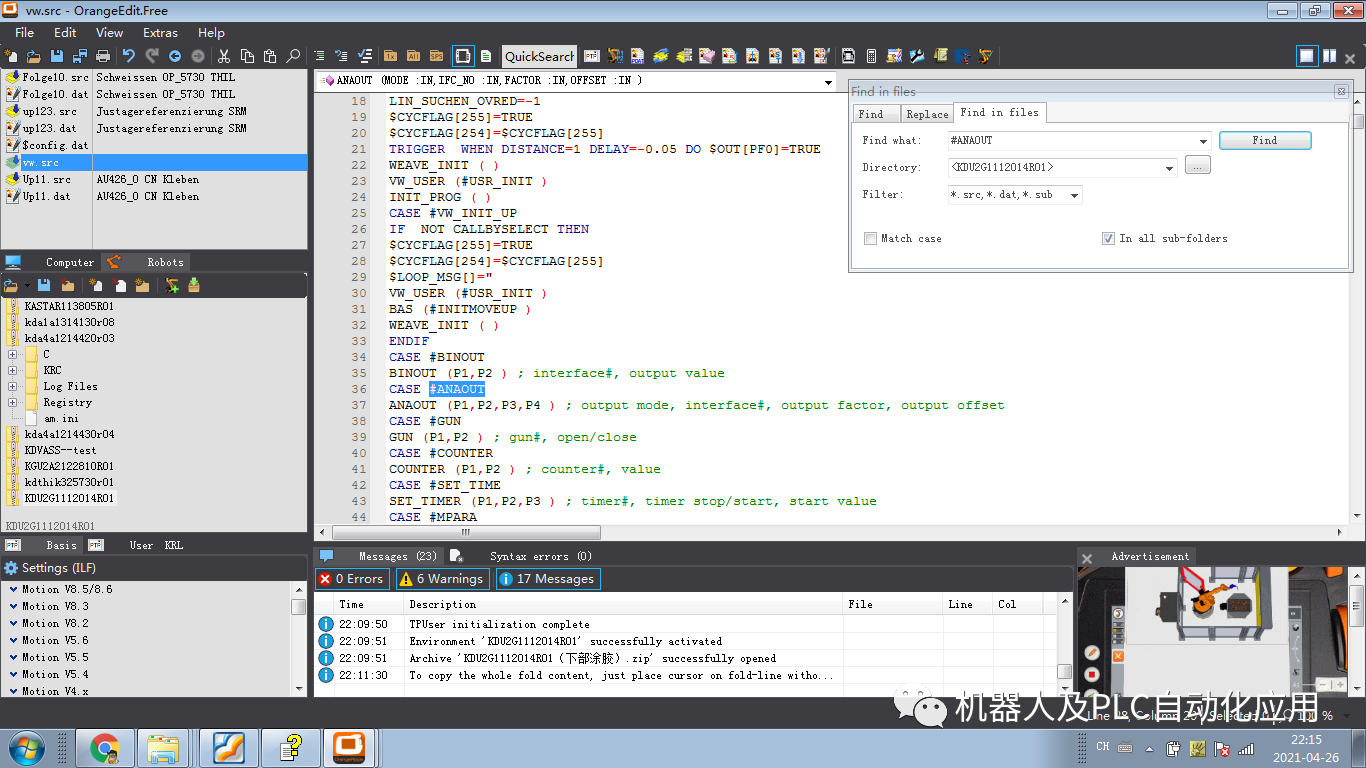
在機器人VW程序中控制模擬量的輸出:
.....
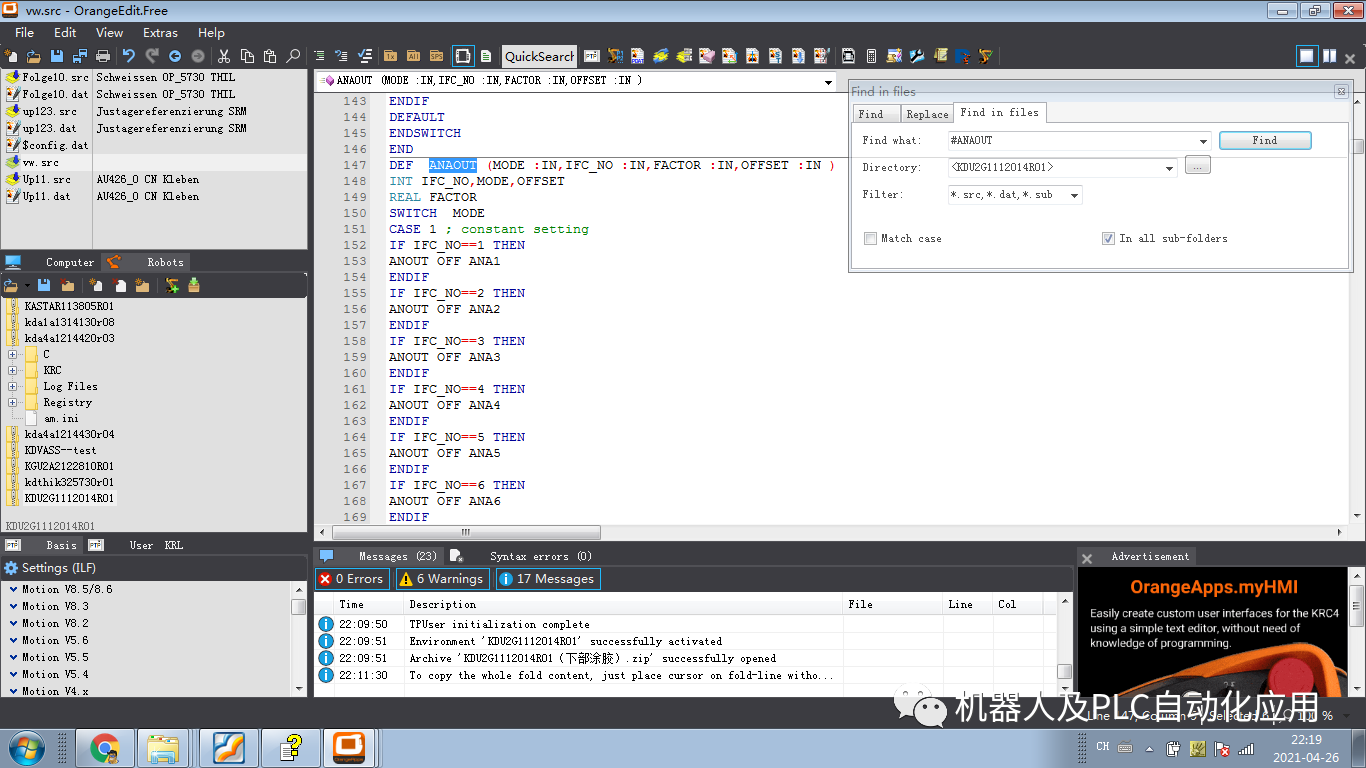
$ANOUT[IFC_NO]=FACTOR*1E-04-發出給入的模擬量的數值,=312*1e-04
CASE 2 -模擬量與速度相關聯
SWITCH IFC_NO
CASE 1
OFS1=OFFSET*1E-04
IF FACTOR==0 THEN -標準值的算法
FACTOR=2E+06
ENDIF
FAC1=1000/FACTOR -正常輸入值得算法FACTOR=312
-按照標準格式發出的模擬量輸出-
ANOUTON ANA1=$VEL_ACT*FAC1+OFS1-打開模擬量機器人當前速度的又有關的算法,加上基數
DELAY=ANA_DELAY1 是否推遲或提前發出模擬量
.................
--------------------END------------------
審核編輯 :李倩
-
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
變量
+關注
關注
0文章
613瀏覽量
28360
原文標題:KUKS -ANOUT:循環說明模擬輸出端
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一招教你實現通用模擬輸出設計
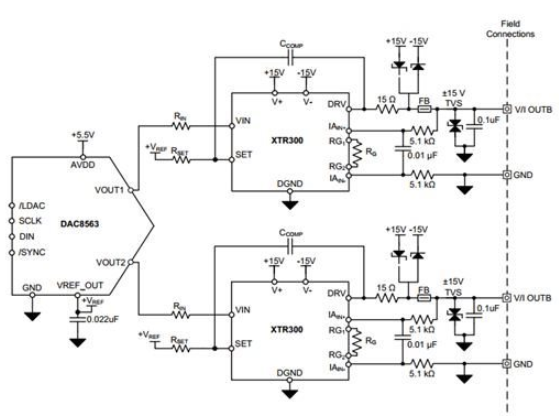
通用模擬輸出的設計
如何設計通用模擬輸出
FBs系列PWMDA模擬輸出模塊使用說明
概述KUKS -ANOUT的循環說明模擬輸出端

如何構建環路供電的模擬輸出

KUKS -ANOUT:循環說明模擬輸出端
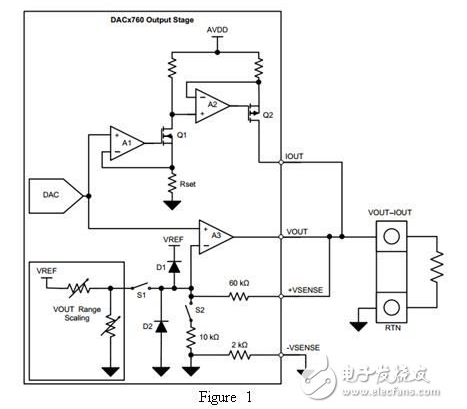
機器人控制器如何給模擬輸出端賦值V4.8
保護三線制模擬輸出







 工商網監
工商網監
評論