 西門子PLC自由口通訊配合中斷的實例
西門子PLC自由口通訊配合中斷的實例
以前我們講過關于自由口通訊的實例,今天我們講一下自由口通訊配合中斷的實例。
在一些特定場合,比如說與松下系列伺服驅動器的控制時,為了保證數據的安全,我們需要進行多次往返的數據交換,這就需要嚴格控制通訊的時間。那么這個時候對于PLC來說通訊就是最重要的,所以我們需要打斷PLC的正常功能,優先處理通訊,這就需要通訊中斷。
實例:2臺S7-200 SMART CPU(端口0)采用自由口通信方式實現相互通信
(本文僅為展示自由口通訊和中斷,如果想要實現這兩個PLC的通訊其實最好是使用向導進行以太網通訊,有機會我們也會進行講解!)
通信任務:CPU1 每秒觸發一次 XMT 指令將 CPU 的實時時鐘發送到 CPU2;CPU2 接收到 CPU1 發送的信息后立即將 CPU2 的實時時鐘回復到 CPU1。
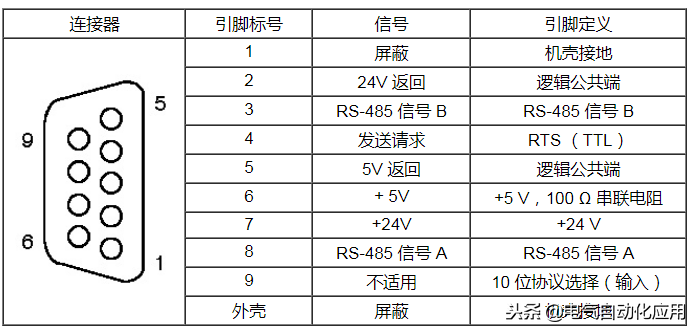
接線:每個 S7-200 SMART CPU 都提供一個以太網端口和一個 RS485 端口(端口0),標準型 CPU 額外支持 SB CM01 信號板(端口1),信號板可通過 STEP 7-Micro/WIN SMART 軟件組態為 RS232 通信端口或 RS485 通信端口。
CPU 通信端口引腳分配
1、CPU1 編程
1.1、CPU1 主程序編程如圖 所示:
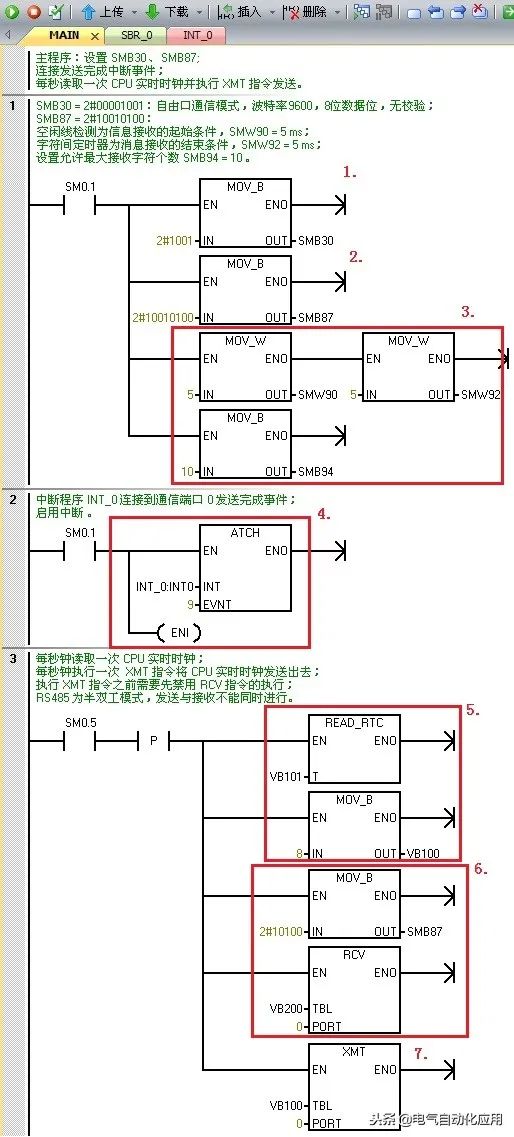
CPU1主程序
程序講解:
1. 設置 SMB30 = 2#00001001 (自由口通信,波特率 9600 bps,8 位數據位,無校驗)。
2. 設置 SMB87 = 2#10010100,使用空閑線檢測為信息接收的起始條件,使用字符間定時器為信息接收的結束條件。
3. 設置空閑線定時器 SMW90 = 5 ms,字符間定時器 SMW92 = 5 ms,允許最大接收字符個數 SMB94 = 10。
4. 連接中斷子程序 INT_0 到通信端口 0 發送完成事件,并啟用中斷。
5. 每秒鐘讀取一次 CPU 的實時時鐘,并將發送緩沖區長度設置為 8 個字符。
6. 執行 XMT 指令之前設置 SM87.7 = 0,同時執行 RCV 指令,終止消息接收。
7. 每秒鐘執行一次 XMT 指令將 CPU 的實時時鐘發送出去。
1.2、 CPU1 發送完成中斷子程序 INT_0 編程
中斷子程序INT_0用于恢復 SMB87 的設置(SM87.7 = 1),并執行 RCV 指令開始接收 CPU2的應答信息。程序如圖4. 所示:
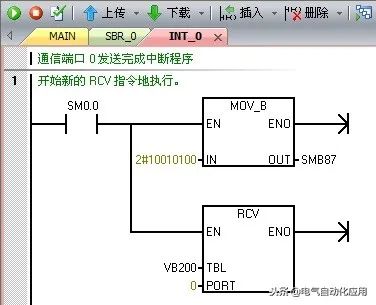
CPU1 中斷子程序 INT_0
2、CPU2 編程
2.1、CPU2 主程序編程如圖所示:
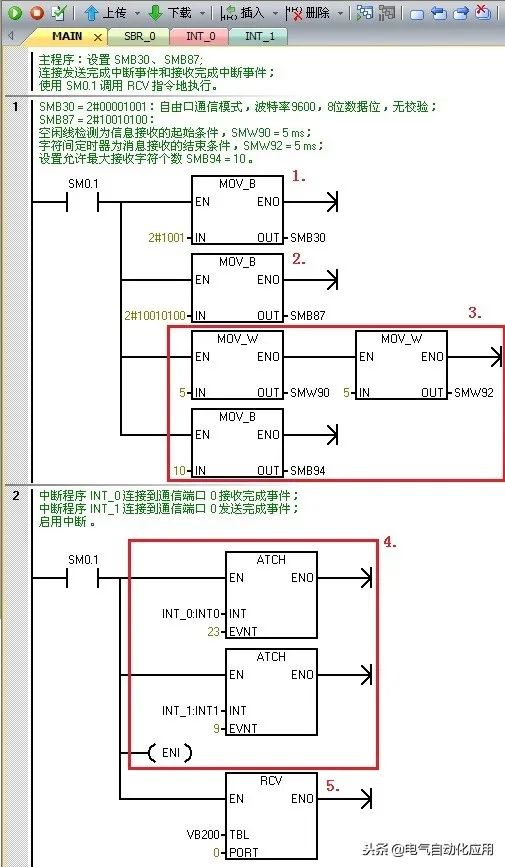
CPU2主程序
1. 設置 SMB30 = 2#00001001 (自由口通信,波特率 9600 bps,8 位數據位,無校驗)。
2. 設置 SMB87 = 2#10010100,使用空閑線檢測為信息接收的起始條件,使用字符間定時器為信息接收的結束條件。
3. 設置空閑線定時器 SMW90 = 5 ms,字符間定時器 SMW92 = 5 ms,允許最大接收字符個數 SMB94 = 10。
4. 連接中斷子程序 INT_0 到通信端口 0 接收完成事件,中斷子程序 INT_1 到通信端口 0 發送完成事件,并啟用中斷。
5. 使用 SM0.1 調用 RCV 指令地執行。
2.2、 CPU2 接收完成中斷子程序 INT_0 編程
中斷子程序INT_0用于讀取 CPU 實時時鐘,并調用 XMT 指令將實時時鐘信息發送出去。程序如圖所示。
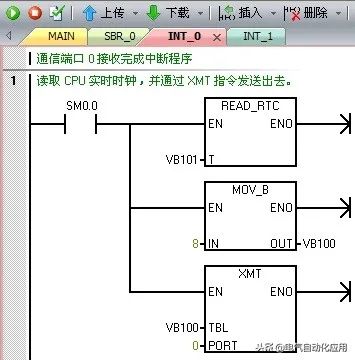
CPU2 接收完成中斷子程序 INT_0
2.3、 CPU2 發送完成中斷子程序 INT_1 編程
中斷子程序 INT_1 用于執行 RCV 指令,并開始新的信息接收任務。程序如圖 7.所示。
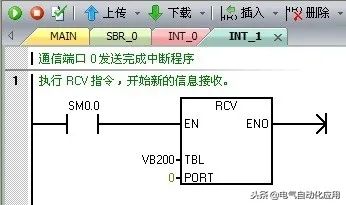
CPU2 發送完成中斷子程序 INT_0
審核編輯:湯梓紅
-
以太網
+關注
關注
40文章
5419瀏覽量
171598 -
plc
+關注
關注
5010文章
13271瀏覽量
463057 -
cpu
+關注
關注
68文章
10854瀏覽量
211583 -
西門子
+關注
關注
94文章
3034瀏覽量
115780 -
通訊
+關注
關注
9文章
902瀏覽量
34889
原文標題:西門子PLC自由口通訊+中斷,這么用很方便,圖文實例講解!
文章出處:【微信號:工控PLC學習,微信公眾號:工控PLC學習】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何通過西門子S7-1200緊湊型PLC實現自由口通訊

西門子plc數據類型_西門子plc通訊方式


西門子1200PLC之間的ModbusTCP通訊如何實現?






 工商網監
工商網監
評論