 HFAN-08.2.1:用于熱電模塊的PWM溫度控制器
HFAN-08.2.1:用于熱電模塊的PWM溫度控制器
本文介紹了一種熱電冷卻器 (TEC) 溫度控制器,用于將半導體激光管(或其他組件)的溫度保持在 0.1°C 以內
為什么要控制組件溫度
對于大多數電子系統,精度受環境溫度變化的影響。我們可以通過將關鍵組件的局部溫度限制在較窄的范圍內來提高精度。這種方法的適當應用包括高性能晶體、表面聲波 (SAW) 濾波器、光子放大器和激光二極管。
烤箱與冷卻器
穩定組件溫度的一種方法是將組件封裝在固定溫度的烘箱中。為了提供一定的調節余量,所選溫度在所有條件下都應高于環境溫度。該方案被廣泛使用,特別是在設計極其穩定的時鐘時,例如烤箱控制的晶體振蕩器(OCXO)。
使用高溫有一些缺點。首先,性能可能會在幾個方面略有下降,包括噪聲系數、速度和壽命。其次,即使環境溫度處于其范圍的中間,調壓閥也會消耗功率進行加熱。當環境溫度處于其范圍的下限時,需要兩倍的功率。第三,達到穩定溫度所需的時間可能相當長,尤其是在可用電力有限的情況下。
熱電冷卻器(TEC)技術越來越受歡迎,因為它允許您在工作溫度范圍的中間選擇一個調節的溫度值。TEC既可以作為熱泵運行,也可以作為熱發生器運行,具體取決于電流流動的方向。一些系統僅使用TEC的冷卻特性(例如冰箱單元和強大處理器的冷卻)。其他應用采用兩種熱流模式(晶體振蕩器和SAW濾波器)。為了緩解前面描述的問題,溫度通常調節在其工作范圍的中間。
此處描述的TEC溫度控制器將半導體激光管保持在0.1°C以內。 工作條件包括 -5°C 至 +70°C 的環境溫度、在整個功率范圍內工作的半導體激光管,以及受紋波影響的低值 (3.3V) 電源。由于小封裝尺寸不允許太多散熱,因此電源效率應盡可能高。
許多應用的要求要低得多,因此讀卡器可以根據需要自由修改和簡化此溫度調節器。
什么是技術技術?
熱電冷卻器由多個半導體結組成,這些半導體結串聯并在兩個板之間粘合。這些板必須是良好的熱導體和良好的電絕緣體。陶瓷材料滿足了這一困難而矛盾的要求。一塊板與環境溫度熱連接,另一塊板連接到要調節溫度的物體。由于珀爾帖效應,通過結點的電流在板之間產生溫差,其極性和大小取決于電流的極性和大小。相對于環境溫度,可以加熱或冷卻物體。當今的技術允許高達84°C的溫差,級聯布置會產生更高的溫差。
什么是 NTC?
負溫度系數 (NTC) 電阻器是一種對溫度敏感的器件,其電阻隨溫度升高而減小。在可用的多種類型的NTC組件中,采用陶瓷粉末工藝制造的NTC組件在響應溫度的微小變化時表現出最大的電阻變化。更重要的是,一些陶瓷NTC在適當老化后,在其使用壽命內提供0.05°C的穩定性。與其他溫度傳感器相比,陶瓷NTC的尺寸可能小得驚人。
NTC用于恒溫控制器,即使在當今極低的電源電壓下偏置時,也能提供高靈敏度(參見陶瓷NTC傳感器的靈敏度部分)。對于0.03mV失調,放大器失調引起的絕對誤差接近0.75°C,而在自由空氣中,NTC自熱引起的誤差為0.06°C。(對于完全嵌入并被要測量溫度的材料封閉的傳感器,誤差僅為要測量材料的一半。幸運的是,我們不關心絕對溫度誤差,而只關心該誤差在工作溫度范圍內的變化。這種變化通常比絕對誤差小一個數量級。
監管策略
當受到熱通量的影響時,大多數系統(即使是小系統)在其溫度開始穩定之前表現出令人印象深刻的延遲。達到給定溫度梯度的63.2%所需的時間稱為熱時間常數,通常范圍為5s到200s。因此,對于電子工程師來說,與溫度調節器操作相關的時間常數似乎非常長。這里討論的系統具有大約40s的熱時間常數,與電源電壓中可能的瞬態相比,這確實很慢。
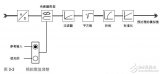
為了能夠響應電源電壓的任何變化,該設計包括兩條并行反饋路徑(圖 2)。TEC的一個陶瓷板與感興趣的物體(在這種情況下是激光二極管)緊密接觸,另一個板允許將熱量傳遞到外部環境溫度。這種傳熱應盡可能暢通無阻,如有必要(當遇到高功率水平時),應由鼓風機輔助。由于一定程度的連續漏熱是不可避免的,因此需要相應量的電力來補償平衡時的泄漏。
圖2.帕爾貼控制器框圖。
為了盡量減少局部溫度下降引起的誤差,溫度檢測點應盡可能靠近物體(NTC的小尺寸非常方便)。在惠斯通電橋內比較測量的溫度和所需溫度。放大器(A)不僅可以放大誤差信號,還可以提供穩定外部閉環所需的頻率相位和增益校正。在任何時刻,它都會向內回路提供達到適當溫度所需的TEC電流值。該請求由非常慢的信號表示,該信號無法對電源電壓的快速變化做出反應。
內環調節進入TEC的電流,并且必須使用開關穩壓器來實現高效轉換,從而產生最少的過量熱量。由于高于 3% 的電流紋波會降低 TEC 的冷卻效率,因此建議使用高開關頻率,以便于對交流組件進行濾波。頻率越高,無源元件越小。內環路帶寬必須足以響應抗正常濾波的紋波和電源瞬變。以下討論詳細介紹了控制器的每個功能塊。
H 橋
功率級必須能夠為TEC提供兩極電流:一種用于冷卻,另一種用于加熱。對于單極性電源,通過“H”橋實現此目標。當H橋各支路的電壓相等(大約在中間電源電壓時),電橋是平衡的,沒有電流可以循環到TEC中。該原理也適用于線性和開關H橋。
圖3顯示了PWM H橋的結構。電橋的左腿由兩個由互補信號DH和DL驅動的n溝道MOSFET組成。為了在U1的上部晶體管導通時提供足夠的柵極幅度,DH信號以LX為參考。此時DH比LX高約3V,LX切換到3.3V電源。因此,DH信號幅度在其高狀態下超過6V。
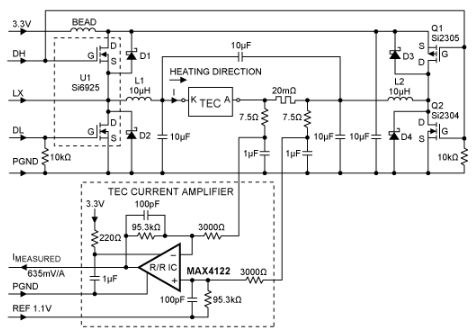
圖3.電源 H 橋和 TEC 電流檢測。
DL信號不需要這種升壓,在0V和3.3V之間切換。由于右腿中的MOSFET與左腿中的相應MOSFET以相反的相位驅動,因此DH信號現在驅動下部晶體管Q2。DL信號不會升壓到6V,因此無法使用n-MOSFET作為右上方的晶體管Q1。必須使用p溝道晶體管,由與下部晶體管Q2相同的DH信號驅動。為了避免任何交叉傳導的可能性,選擇下部晶體管Q2(Si2304)是因為其高閾值(最小值為2.6V),而上部晶體管Q1(Si2305)至少需要0.85V的柵極驅動才能導通。因此,對于低于3.45V的電源電壓,兩個晶體管不能同時導通。DH信號升壓至6V,因此較低晶體管Q2的高閾值不會產生任何損失。
MOSFET晶體管包含本征二極管,其較長的恢復時間會影響效率。為了防止這些二極管中的導通,在四個MOSFET上增加了四個肖特基二極管(D1-D4)。小型0.5A封裝就足夠了,因為肖特基二極管僅在短時間內導通。
H 橋的每一側驅動一個低通濾波器,該濾波器由一個 10μH 電感和一個 10μF 陶瓷電容器組成,該電容為 TEC 供電。TEC兩端的附加10μF消除了差分模式下殘留尖峰的可能性。不必過大電感器。勝美達?型號 CDRH6D28 采用 10.6mm x 7.6mm 和 7mm 厚的封裝,可提供 3μH 的電流。插入一個20mΩ分流器,用于測量TEC電流。粗濾波(7.5Ω和1μF)通過消除大部分開關頻率紋波,提供干凈的20mV/A信號。
信號由MAX32放大器差分放大4122倍。該放大器需要軌到軌輸入能力,因為輸入共模電壓介于地和電源電壓之間。增加了一個 1.1V 的失調電壓,以允許單極性電源。然后,輸出指示 1.1V 表示零電流條件,并以每安培 635mV 的靈敏度向任一側偏向 TEC 的電流。 額外的濾波消除了殘留的高頻紋波。
脈寬調制控制器
穩壓器的核心是 PWM 控制器(圖 4)。當與低閾值外部MOSFET配合使用時,該電路在低至3.15V的電源電壓下工作得非常好。MAX1637雖然主要不是為雙向電流調節而設計的,但已為此進行了修改。它提供兩個互補信號DH和DL,在本例中切換頻率為200kHz。自動插入 60ns 死區時間以避免外部晶體管之間的交叉導通,但/SKIP 引腳應連接至 V抄送以確保DH和DL之間的互補性。
圖4.PWM 控制器和求和節點。
浮柵驅動器輸出DH提供足夠的電壓,使n溝道大腿器件飽和。它由升壓二極管D5偏置,升壓二極管D1在DL處于活動狀態時為1μF儲能電容(C96)充電。占空比不超過1%,因此C0始終充電。在另一個極端,占空比可以達到<>%。該電路利用了這種不對稱性,保留了低占空比區域用于冷卻,而冷卻需要的功率最大。
MAX1637為電流模式控制器,能夠檢測進入負載的電流,但設計用于接收應用中存在的雙向電流。因此,通過將引腳CSL和CSH連接到1%內部基準REF來禁用此功能。該基準電壓源為方便起見,特別是當電壓橋由更精確的電源供電時。對于干凈的啟動,/SHDN (關斷)引腳應由外部電源驅動,或由復位電路(如MAX6326XR31)本地產生。
MAX4250精密放大器執行節點求和功能。MAX1637的欠壓和過壓保護在FB輸入超出正常工作電壓范圍時觸發。電壓范圍由二極管D6和驅動FB節點的阻性網絡削波。放大器“B”為內部環路引入一個補償極點,100nF電容確保在LC H橋濾波器引入過多相位滯后的頻率之前獲得單位增益。
橋式放大器
該功能由兩個串聯的精密放大器(MAX4250各兩個)實現,配置為反相模式。人們應該抵制將這些放大器安裝在同一封裝中的誘惑,因為它們可能在高頻下呈現高增益。它們之間應保持謹慎的距離,以消除任何可能的耦合。(精度較低的控制器只需一個放大器即可輕松完成這項工作。
圖5給出了大多數情況下所需的補償網絡。高精度溫度調節器以高開環增益工作以確保精度,但這種情況可能會影響穩定性。對閉環中每個極點的仔細評估必須包括影響極點的所有參數(元件值等)的最壞情況變化。在這種情況下,主導極(由系統的熱質量引起)的時間常數約為40s±10s。下一個最高極點是由NTC傳感器引起的。NTC 時間常數的范圍從 100ms 到 3s,具體取決于型號。
圖5.惠斯通電橋補償和放大。
這兩個低通濾波器極點(顯性+NTC)串聯,如果不進行補償,顯然會損害閉環穩定性。第三個重要極點與固有環路的時間常數有關,該時間常數應盡可能小,以獲得良好的電源電壓抑制。由于以下其他極點(由于LC H橋濾波器和差分濾波器)的頻率并不高,因此明智的做法是將外部環路的單位增益設置在第三極以下。實際模型可能更加復雜,因為耦合可能發生在熱敏打印頭內。一些耦合是不可避免的,因為沒有辦法像我們對電阻電子路徑那樣隔離熱塊。
上面解釋了為什么為你能想象到的最困難的情況進行設計是明智的,然后盡可能簡化設計。可以建議一些提示。我們注意到為 R36 選擇了相當高的值,這確保了即使在高頻下也不會加載電橋。電容 C32 可確保在極低頻率下獲得可喜的超額增益。然后選擇電阻R38,使C32/R38極與40s熱極重合。為了有效,C32必須在最高工作溫度下具有非常高的絕緣電阻。
金屬化聚酯 (PET) 電容器在 +5000°C 時可提供高達 20s 的時間常數,但該值會隨著溫度的升高而迅速下降。聚萘甲酸乙二醇酯(PEN)是高溫下更好的材料。顯然,在為此類高阻抗元件設計印刷電路時,必須采取嚴格的預防措施。在高阻抗磁道之間提供較大的間隔,并添加清漆等絕緣層以防止可能的冷凝。
電橋由2.75V的精確基準電壓供電,該基準電壓也會偏置系統中的所有放大器。MAX6012精密基準的最大溫度系數為20ppm/°C。對于每個溫度誤差,模塊輸出(標稱值為1.1V)都需要一些正電流或負電流。電阻分壓器 R43/R42 允許您通過為加熱需求和冷卻需求設置不同的最大限值來保護 TEC。最小輸出電壓將接近于零(得益于U4的軌到軌能力),所示電阻值產生約2V的最大電壓。電路靈敏度為635mV/A時,冷卻的最大電流為1.65A,加熱最大電流為1.4A。
效率結果
溫度控制器與超微型模塊中的等效1.5Ω TEC相關聯。最大加熱和冷卻電流分別限制為1.6A和1.4A,相當于3.84W的可用冷卻功率。為了在可用的微小空間內實現可接受的效率,已經做出了嚴重的妥協。組件高度不應大于 3.5 毫米。8層印刷電路中的銅厚度僅為17μm,這是相當電阻的。此外,在受阻區域放置元件時,必須使用長而有損的連接。
盡管存在這些限制,但該電路仍具有可觀的效率(圖 6)。曲線為藍色表示冷卻,紅色表示加熱,黃色表示線性控制器。僅考慮電效應,測量是用1.71Ω的實際電阻而不是TEC進行的。我們注意到,開關模式(相對于線性)控制在整個電流范圍內提供了更高的效率。因此,開關模塊能夠在給定的輸入功率水平下提供更大的冷卻或接受更高的環境溫度(類似于加熱)。
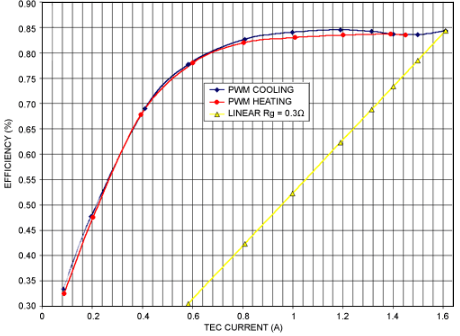
圖6.效率曲線基于圖 3、4 和圖 5。
冷卻和加熱的功率相似,但由于R低,冷卻效率略好一些德森在p溝道MOSFET Q1中(圖3)。在0.8A和1.6A之間,效率幾乎持平,為84%,這意味著開關和偏置損耗很低,在該電流區域幾乎沒有影響。在高電平電流下,控制器的等效輸出電阻(約330mΩ)主要由印刷電路和連接器組成。
溫度穩定性結果
該模塊在-5°C至+70°C范圍內進行了測試。 由于激光二極管波長以已知且準確的方式對溫度敏感,因此可以在工作溫度范圍內驗證二極管溫度在±0.1°C以內的穩定性。
優化提示
印刷電路走線可以占高電流損耗的很大一部分。如果可能,請使用35μm或更大的銅層。此外,在可能的情況下,使用多層為大電流創建并聯走線,并將姊妹走線與大量過孔連接起來,以減少寄生電阻。對接地層使用相同的技巧,這可以從使用未使用區域中的所有可用層中受益。
最敏感的電路是橋式放大器。應避免由于接地層壓降而導致的共模電壓誤差。在高電流水平下很容易累積毫伏誤差:在1.6A時,誤差應低于2.7mV (0.1°C)。提供大的銅表面用于冷卻MOSFET功率晶體管,因為它們的R德森隨著溫度的增加而迅速增加。如果電感高度允許4mm或更大,勝美達CDRH6D38(與CDRH6D28相同)可以節省約50mΩ的串聯電阻。最后,使用強鐵氧體磁珠濾波來消除輸入電源的反向污染。與傳統電感的行為相反,磁珠中的耗散(損耗)在直流時較低,但隨頻率增加而增加。
陶瓷NTC傳感器的靈敏度
惠斯通電橋非常適合恒溫控制器,因為系統只試圖保持零誤差(Vs)在兩條腿的電壓之間。幾乎無需考慮線性度、增益精度或電源電壓(Ve) 靈敏度,提供誤差信號 Vs由高增益和高輸入阻抗的放大器處理,其失調在整個溫度范圍內保持穩定。為了允許使用與溫度相對變化相匹配的橋式電阻,電橋偏置電壓Vn通常設置在 V 附近e/2.
圖7.惠斯通電橋。
盡管“斯坦哈特-哈特”方程以更高的精度預測NTC行為,但給定溫度周圍的微小變化更簡單地通過給定NTC的β(材料常數,單位均勻到°C)來建模。
鑒于 R0是給定參考溫度 T 下的電阻0,NTC電阻RT在溫度下,T可以從方程中以可接受的精度推導出來
RT = R0 exp[β(1/T - 1/T0)]。
取其導數,我們得到
dRT = R0 exp[β(1/T - 1/T0)] × (-β/T2)dT,
并且通過結合前兩個結果,導致
dRT/RT = -β/T2dT.
惠斯通電橋在接近平衡時運行,其中
R30 = R31 = R1 和 R32 ? NTC = RT
輕微變化 (dT) 會產生 RT 的變化 dRT,從而產生 Vs(圖 7):
VS = -Ve × R1/(R1 + RT)2dRT
通過結合公式1,我們得到
VS/dT = β/T2 × Ve[R1 RT/(R1 + RT)2]。
最后一項可以識別為等于 Vn (Ve - Vn)/Ve so
VS/dT = β/T2 × Vn(Ve - Vn)/Ve
很容易推導出來,一旦Ve和 Vn與適當的 NTC 一起選擇。例如,考慮激勵電壓為 V 的電橋e2.75V。為了消除與積分電容器充電相關的長延遲,Vn選擇等于MAX1637基準電壓(1.1V)。10°C時NTC熱敏電阻為25kΩ,在+3892°C環境溫度(35K)下β為308°C。因此,我們可以指望輸入靈敏度V。s/dT = 27mV/°C。
為了保證0.1°C的穩定性,電子器件的失調變化必須遠小于2.7mV,而使用高性能放大器可以輕松實現。例如,MAX4250絕對失調保證在-0°C至+75°C溫度范圍內小于40.85mV。 溫度穩定性僅與失調變化有關,在整個溫度范圍內通常為0.3μV/°C。這意味著±10°C的溫度偏移變化為±5.35μV,對應于±0.004°C的典型誤差!
NTC自發熱引起的誤差與其耗散常數(DC)有關。偏置在10.1V時的1kΩNTC功耗約為0.12mW。典型直流電為 2mW/°C(在自由空氣中)時,自熱溫度為 0.06°C。 但同樣,只有當施加的電壓發生變化時,溫度穩定性才值得關注,這在本應用中不太可能。
審核編輯:郭婷
-
放大器
+關注
關注
143文章
13612瀏覽量
213750 -
二極管
+關注
關注
147文章
9668瀏覽量
166869 -
濾波器
+關注
關注
161文章
7846瀏覽量
178416
發布評論請先 登錄
相關推薦
基于熱電堆的手勢背光控制器參考設計
HFAN-08.2.1: PWM Temperature C
HFAN-08.2.1: PWM Temperature C
MAX1978, MAX1979 Peltier模塊集成溫度
基于FM 455控制器模塊布線及工作原理
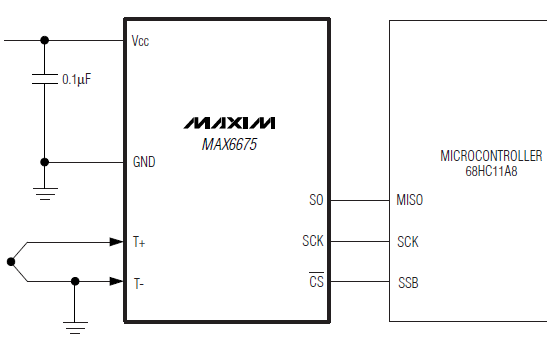
MAX6675熱電偶溫度控制器的詳細介紹和設置與實現的資料合集免費下載
基于PWM控制器和IPM模塊的變頻電源設計






 工商網監
工商網監
評論