 數字電路的復位可分為哪些
數字電路的復位可分為哪些
1、復位的重要性
數字電路中寄存器和 RAM 在上電之后默認的狀態和數據是不確定的,如果有復位,我們可以把寄存器 復位到初始狀態 0,RAM 的數據可以通過復位來觸發 RAM 初始化到全 0。那可能很多人會問為什么是全 0呢?其實一般邏輯起始都是從 0 開始變化的,這個是根據設計的需要設定的一個值,如果設計需要寄存器 上電復位為 1,也是可以的。還有一種情況是邏輯進入了錯誤的狀態,通過復位可以把所有的邏輯狀態恢復 到初始值,如果沒有復位,那么邏輯可能永遠運行在錯誤的狀態。
因此復位功能是很重要的一個功能。數字電路的復位通常可分為:同步復位與異步復位。
2、同步復位
同步復位:同步復位指的是當時鐘上升沿檢測(有效沿)到復位信號,執行復位操作,有效的時鐘沿是前提。
Verilog代碼:
//*******************同步復位模塊**************************
//-----------端口定義-------------------------------
inputclk,//工作時鐘
inputrst_n,//復位,低電平有效
inputin,//輸入信號
outputregout//輸出信號
);
//-----------輸出模塊-------------------------------
always@(posedge clk )begin
if(!rst_n)
out <= 1'b0;//復位將輸出置零
else
out <= in;//其他時候將輸入賦值給輸出
end
endmodule
使用Quartus II綜合出的RTL如下:
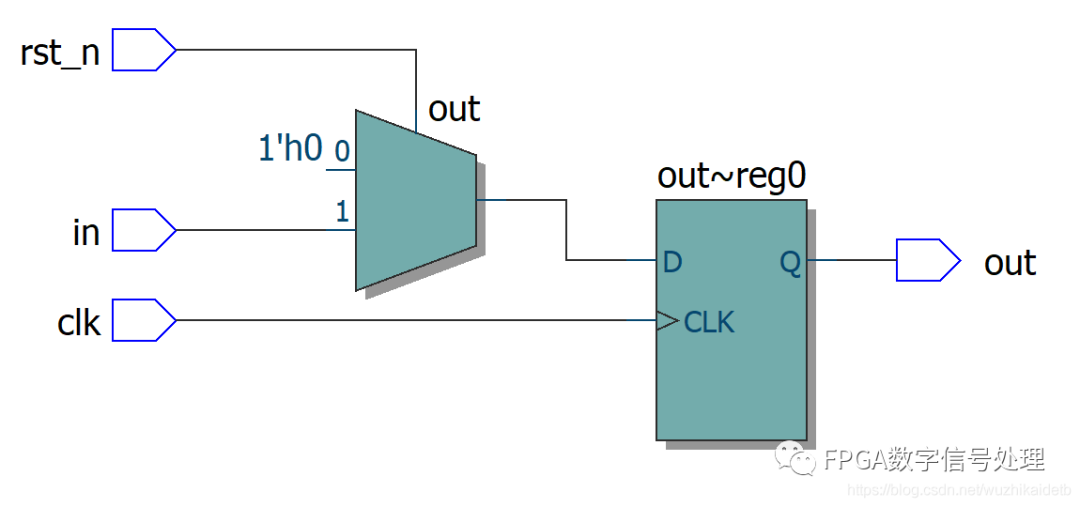
可以看到,生成的觸發器并沒有復位置位端,而是生成了一個選擇器,同步復位信號rst_n用作了選擇器的使能,從而實現復位清零的作用。
用如下Testbench進行仿真(復位時間不足一個時鐘周期、復位時間超過一個時鐘周期、一個高頻復位毛刺):
//------------------------------------------------
//--同步復位仿真
//------------------------------------------------
`timescale 1ns/1ns//時間單位/精度
//------------<模塊及端口聲明>----------------------------------------
module tb_rst_test();
reg clk;
reg rst_n;
regin;
wireout;
//------------<例化被測試模塊>----------------------------------------
rst_testrst_test_inst(
.clk(clk),
.rst_n(rst_n),
.in(in),
.out (out)
);
//------------<設置初始測試條件>----------------------------------------
initial begin
clk = 1'b0;
rst_n <= 1'b0;
in <= 1'b1;
#5
rst_n <= 1'b1;
#6
rst_n <= 1'b0;?
#18
rst_n <= 1'b1;
#39
rst_n <= 1'b0;
#21
rst_n <= 1'b1;
#25
rst_n <= 1'b0;
#3
rst_n <= 1'b1;?
end
//------------<設置時鐘>----------------------------------------------
always #10 clk = ~clk;//系統時鐘周期20ns
endmodule
仿真結果如下:
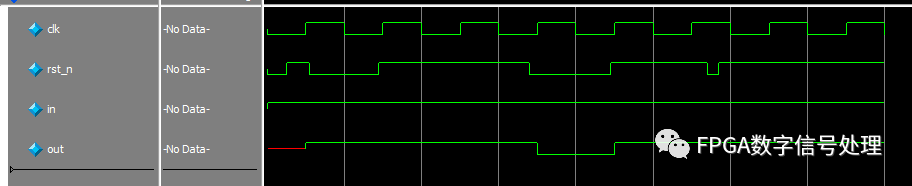
從仿真結果可以看到:
第1個復位時間不足一個時鐘周期,導致復位不成功
第2個復位時間超過一個時鐘周期,復位成功
最后一個復位信號上的高頻毛刺信號沒有對系統造成誤復位
輸出信號在第一個時鐘上升沿到來之前是未知狀態
同步復位電路的優點:
有利于仿真器的仿真
基本上沒有亞穩態問題
可以使所設計的系統成為 100%的同步時序電路,有利于時序分析
由于只在時鐘有效電平到來時才有效,所以可以濾除高于時鐘頻率的復位毛刺
同步復位電路的缺點:
復位信號的有效時長必須大于時鐘周期,才能真正被系統識別并完成復位任務。同時還要考慮延時因素
大多數的FPGA的DFF都只有異步復位端口,采用同步復位的話,綜合器就會在寄存器的數據輸入端口插入組合邏輯,這樣會耗費邏輯資源
3、異步復位
異步復位:異步復位指的是無論時鐘沿是否到來,只要復位信號有效,就對系統進行復位。當時鐘上升沿檢測到復位信號,執行復位操作。
Verilog代碼:
//*******************同步復位模塊**************************
//-----------端口定義-------------------------------
modulerst_test(
inputclk,//工作時鐘
inputrst_n,//復位,低電平有效
inputin,//輸入信號
outputregout//輸出信號
);
//-----------輸出模塊-------------------------------
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
out <= 1'b0;//復位將輸出置零
else
out <= in;//其他時候將輸入賦值給輸出
end
endmodule
使用Quartus II綜合出的RTL如下:
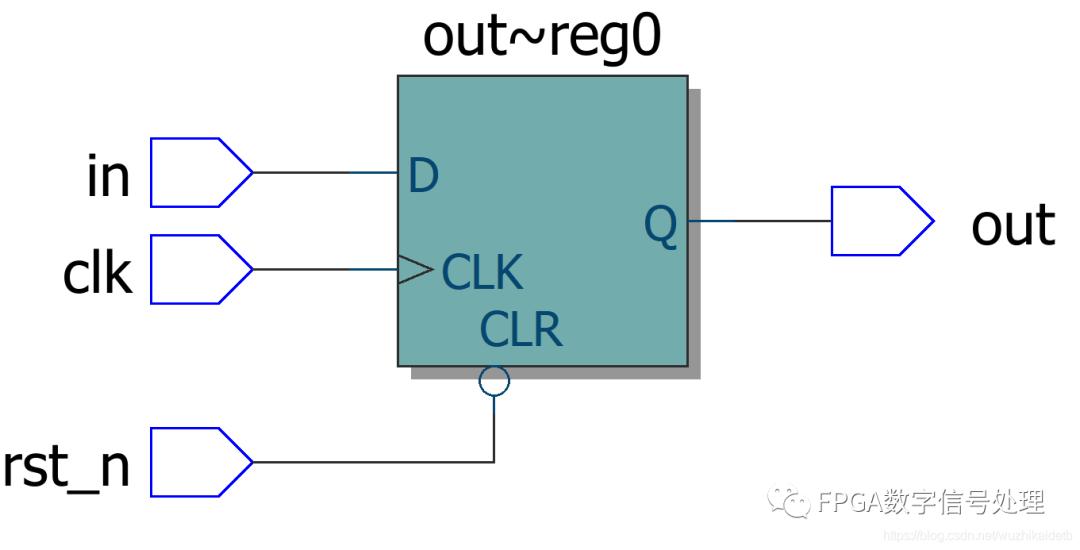
可以看到,異步復位信號rst_n直接接入了觸發器的異步復位端,從而實現復位清零的作用。
依然使用之前用的Testbench進行仿真,結果如下:

從仿真結果可以看到:
只要復位信號被置為低電平,就執行復位操作,與時鐘無關
高頻毛刺信號會對系統造成誤復位
在不考慮亞穩態的前提下,復位時間沒有要求
a、在復位信號釋放(release)的時候容易出現問題。具體就是說:倘若復位釋放時恰恰在時鐘有效沿附近,就很容易使寄存器輸出出現亞穩態,從而導致亞穩態。
b、復位信號容易受到毛刺的影響
異步復位電路的優點:
大多數目標器件庫的dff都有異步復位端口,因此采用異步復位可以節省資源
設計相對簡單,異步復位信號識別方便,而且可以很方便的使用FPGA的全局復位端口GSR
異步復位電路的缺點:
復位信號容易受到毛刺的影響
因為是異步邏輯,無法避免地存在亞穩態問題
關于異步復位還需要考慮:
恢復時間(Recovery Time)是指異步控制信號(如寄存器的異步清除和置位控制信號)在“下個時鐘沿”來臨之前變無效的最小時間長度。這個時間的意義是,如果保證不了這個最小恢復時間,也就是說這個異步控制信號的解除與“下個時鐘沿”離得太近(但在這個時鐘沿之前),沒有給寄存器留有足夠時間來恢復至正常狀態,那么就不能保證“下個時鐘沿”能正常作用,也就是說這個“時鐘沿”可能會失效。
去除時間(Removal)是指異步控制信號(如寄存器的異步清除和置位控制信號)在“有效時鐘沿”之后變無效的最小時間長度。這個時間的意義是,如果保證不了這個去除時間,也就是說這個異步控制信號的解除與“有效時鐘沿”離得太近(但在這個時鐘沿之后),那么就不能保證有效地屏蔽這個“時鐘沿”,也就是說這個“時鐘沿”可能會起作用。
換句話來說,如果你想讓某個時鐘沿起作用,那么你就應該在“恢復時間”之前是異步控制信號變無效,如果你想讓某個時鐘沿不起作用,那么你就應該在“去除時間”過后使控制信號變無效。如果你的控制信號在這兩種情況之間,那么就沒法確定時鐘沿是否起作用或不起作用了,也就是說可能會造成寄存器處于不確定的狀態。而這些情況是應該避免的。所以恢復時間和去除時間是應該遵守的。
4、異步復位、同步釋放
結合兩種復位的優點,可以使用異步復位、同步釋放設計,Verilog代碼如下:
//*******************同步復位模塊**************************
//-----------端口定義-------------------------------
modulerst_test(
inputclk,//工作時鐘
inputrst_n,//復位,低電平有效
inputin,//輸入信號
outputregout//輸出信號
);
//-----------reg定義-------------------------------
reg arst_n_r;
reg arst_n;
//-----------復位信號同步模塊-------------------------------
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
arst_n_r <= 1'b0;//復位將輸出置零
arst_n <= 1'b0;//復位將輸出置零?
end
else begin
arst_n_r <= 1'b1;//跟接rst_n是一樣的,都是邏輯1
arst_n <= arst_n_r;??
end
end
//-----------輸出模塊-------------------------------
always@(posedge clk or negedge arst_n)begin
if(!arst_n)
out <= 1'b0; ? ?//復位將輸出置零
else
out <= in; ? ?//其他時候將輸入賦值給輸出
end
endmodule
綜合出來的RTL視圖:
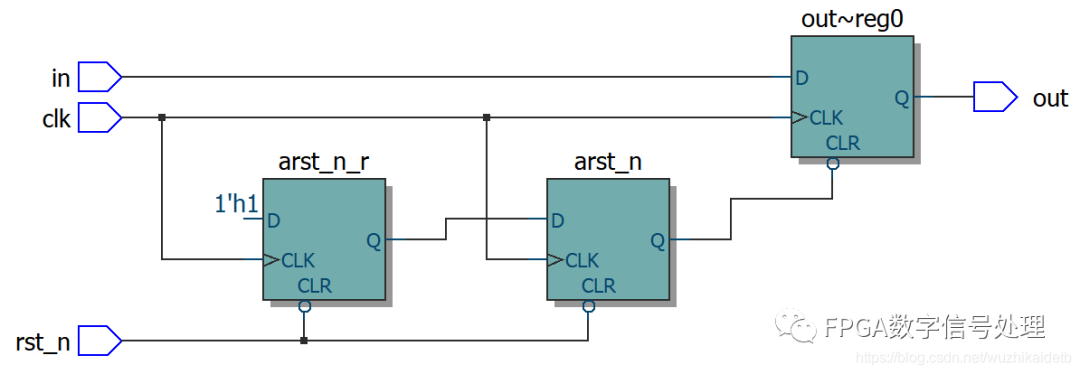
實際的電路圖如下:
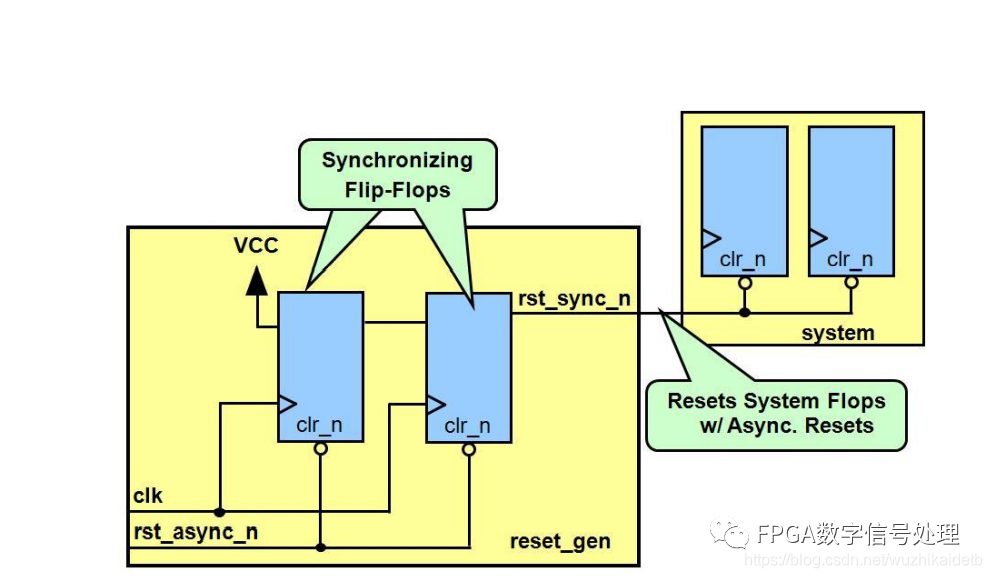
復位信號 rst_sync_n 由高拉低時實現 y 寄存器的異步復位。同步釋放,這個是關鍵,即當復位信號 rst_async_n 撤除時(由低拉高),由于雙緩沖電路(雙觸發器)的作用,rst_sync_n 不會隨著rst_async_n 的 撤除而撤除。假設 rst_async_n 撤除時發生在 clk 上升沿,如果不加此電路則可能發生亞穩態事件,但是加上此電路以后,假設第一級 D 觸發器 clk 上升沿時 rst_async_n 正好撤除,(第一個 DFF 此時是處于亞穩態 的;假設此時識別到高電平;若是識別到低電平,則增加一個 Delay)則 DFF1 輸出高電平,此時第二級觸發器也會更新輸出,但是輸出值為前一級觸發器 clk 來之前時的 Q1 輸出狀態,顯然 Q1 之前為低電平,所以第二級觸發器輸出保持復位低電平,直到下一個 clk 來之后,才隨著變為高電平,即同步釋放。
使用如下Testbench進行仿真:
//------------------------------------------------
//--同步復位仿真
//------------------------------------------------
`timescale 1ns/1ns//時間單位/精度
//------------<模塊及端口聲明>----------------------------------------
module tb_rst_test();
reg clk;
reg rst_n;
regin;
wireout;
//------------<例化被測試模塊>----------------------------------------
rst_testrst_test_inst(
.clk(clk),
.rst_n(rst_n),
.in(in),
.out (out)
);
//------------<設置初始測試條件>----------------------------------------
initial begin
clk = 1'b0;
rst_n <= 1'b0;
in <= 1'b1;
#25
rst_n <= 1'b1;
#6
rst_n <= 1'b1;
#18
rst_n <= 1'b1;
#39
rst_n <= 1'b0;
#21
rst_n <= 1'b1;
end
//------------<設置時鐘>----------------------------------------------
always #10 clk = ~clk;//系統時鐘周期20ns
endmodule
仿真結果如下:
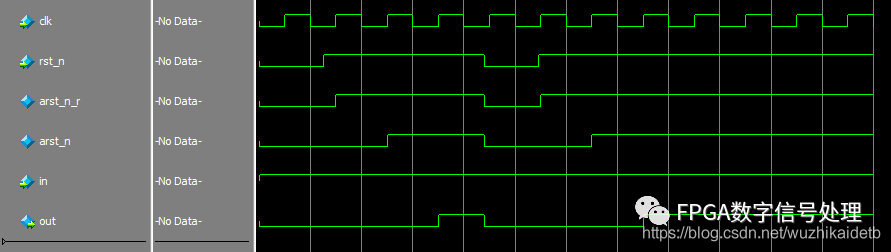
可以看到:復位是異步進行的,一旦復位信號為低電平,則輸出復位,而復位的撤除則被同步到了時鐘域下。如此一來,既解決了同步復位的資源消耗問題,也解決了異步復位的亞穩態問題。其根本思想,也是將異步信號同步化。
聲明: 本文轉載自csdn:孤獨的單刀,如涉及作品內容、版權和其它問題,請于聯系工作人員微(in0723mango),我們將在第一時間和您對接刪除處理! 投稿/招聘/廣告/課程合作/資源置換請加微信:13237418207

Xilinx FPGA的約束設計和時序分析總結

-
寄存器
+關注
關注
31文章
5336瀏覽量
120232 -
RAM
+關注
關注
8文章
1368瀏覽量
114643 -
數字電路
+關注
關注
193文章
1605瀏覽量
80580
原文標題:FPGA同步復位、異步復位、異步復位同步釋放
文章出處:【微信號:FPGA研究院,微信公眾號:FPGA研究院】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論