 使用AI愛克斯開發板與LabVIEW實現麥克納母輪小車的控制
使用AI愛克斯開發板與LabVIEW實現麥克納母輪小車的控制
01
/簡介/
本項目旨在探索和實現利用AI 愛克斯開發板和LabVIEW軟件平臺對麥克納母輪小車的精確控制。麥克納母輪小車以其靈活的移動能力和廣泛的應用前景在機器人領域受到廣泛關注,目前作為創新動手平臺,已廣泛應用于各大中小學以及高校的 STEAM 教育中。
基于英特爾N5105處理器的 AI 愛克斯開發板是一款功能強大的小型計算機,專為支持入門級邊緣人工智能應用程序和設備而設計。無論是在人工智能學習、開發還是實訓等應用場景下,它都能完美勝任。

NI LabVIEW 則是一款圖形化編程環境,以其直觀的編程方式和豐富的數據處理能力深受工程師們的喜愛。
在本項目中,我們將 AI 愛克斯開發板和 LabVIEW 結合,通過設計和實現適合麥克納母輪小車的控制算法,實現對麥克納母輪小車的實時控制。
本文范例代碼:
git clone
https://github.com/aiblockly/aixbroad_code_example.git
02
/Mbot mega 麥克納母輪小車/
mBot Mega 是一款先進的二合一機器人套件。全金屬外殼,科技感十足,自主拼裝,享受動手樂趣與成就感。4個直流電機搭配全向移動麥克納姆輪,可進行機器人移動算法學習,實現萬向移動等更靈活更高級的機器人運動控制,盡享超感遙控體驗。配備18650充電鋰電池,2600mAh容量,為澎湃動力提供強勁電量。搭載多種智能傳感器,可實現手勢識別。支持圖形化編程、Python、Arduino C 語言編程。


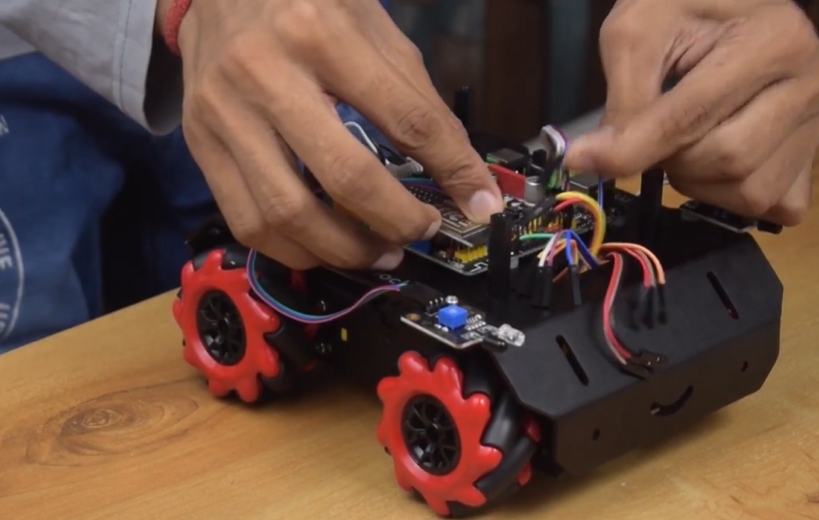
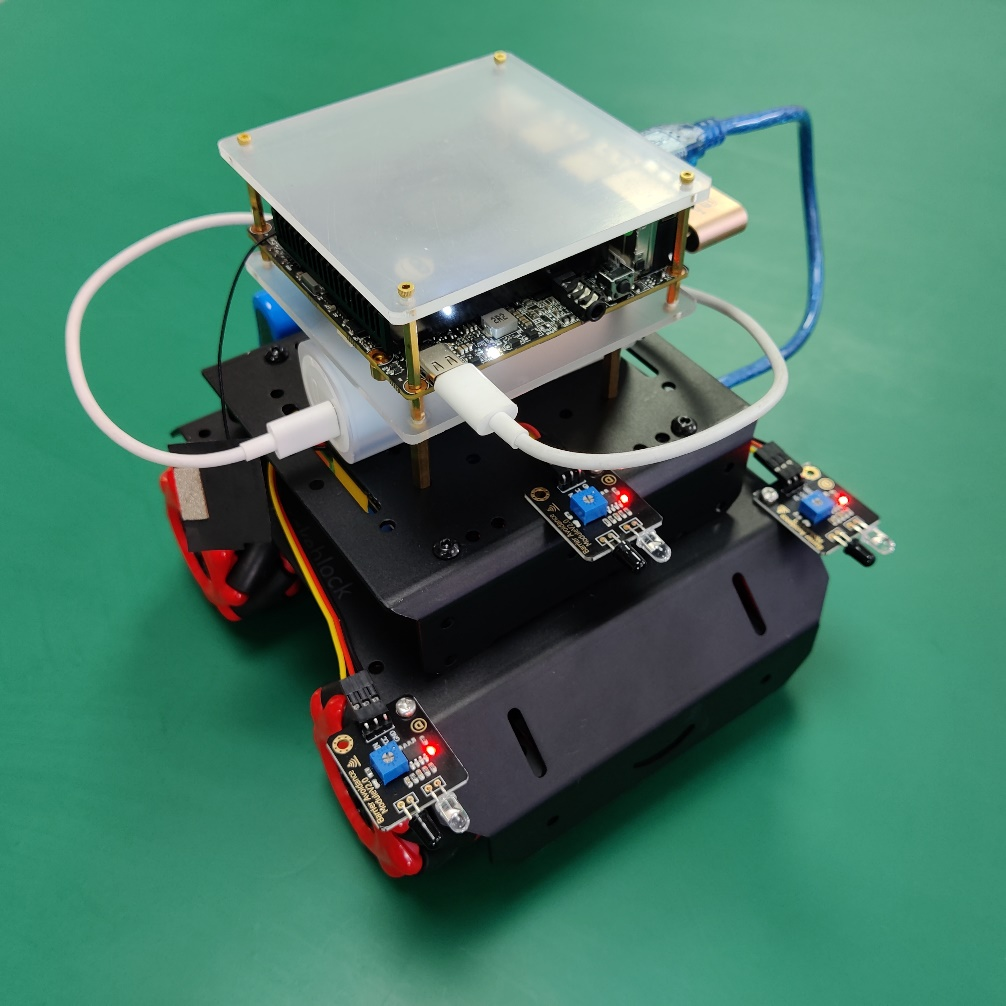
組裝麥輪小車
請按照說明文檔對麥克納母輪小車進行組裝,首先是小車本體的組裝,隨后需要將 AI 愛克斯開發板安裝在小車上,具體可以參考圖或相關文檔。
03
/開發 LabVIEW 程序/
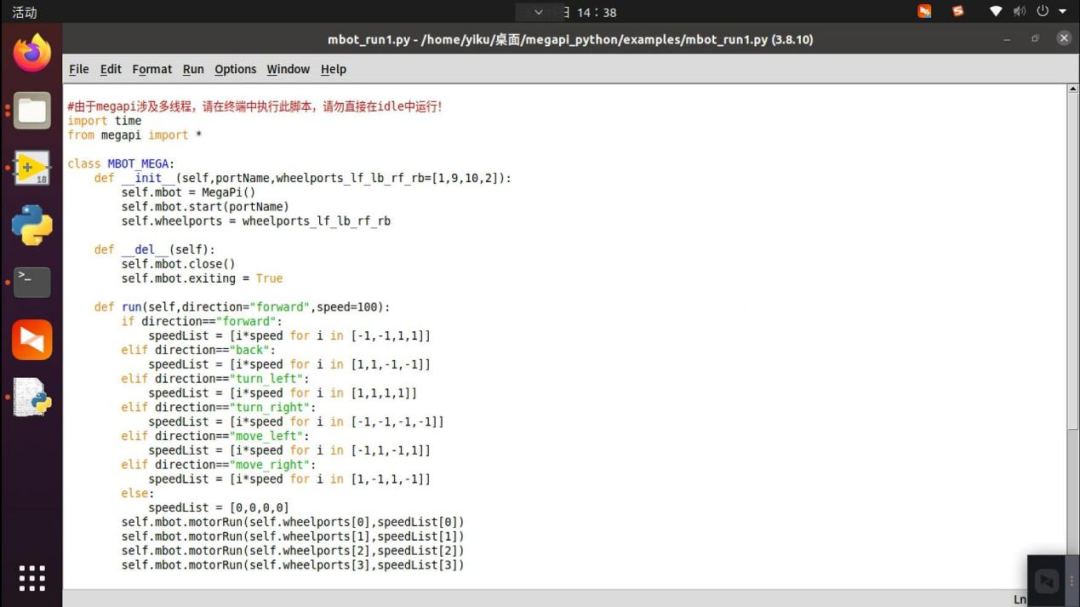
我們可以使用 Python 代碼來實現對麥克納母輪小車的控制(如下圖):
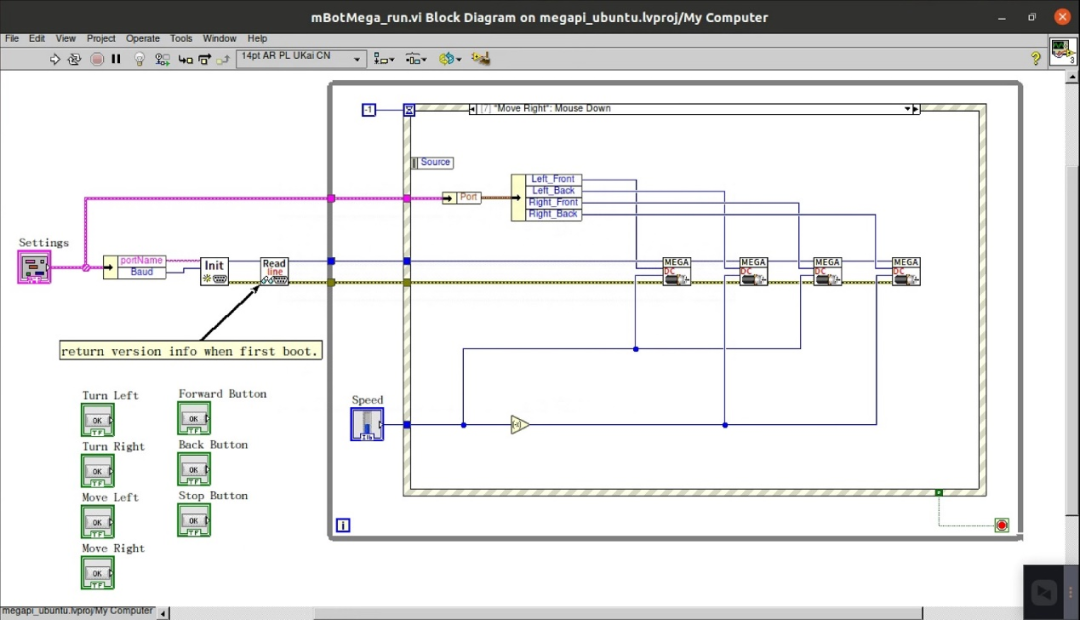
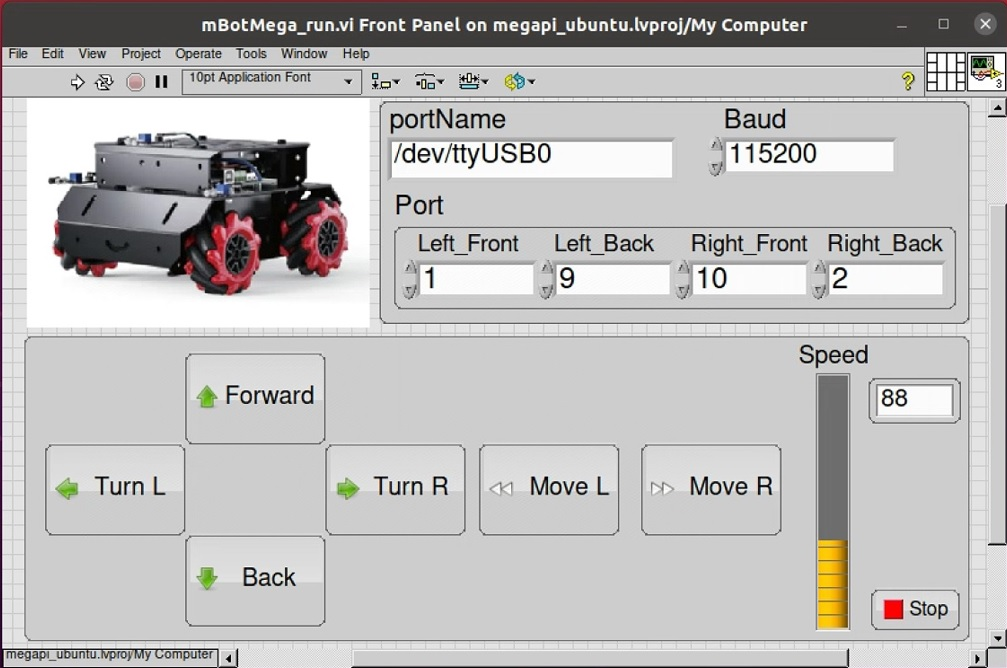
不過相比而言,使用 NI LabVIEW 圖形化編程平臺讓開發更為簡明,如下圖程序所示,簡單的一個事件循環就實現了對麥克納母輪小車的基本運行控制(界面);
04
/結論/
通過本項目的實踐探索,我們驗證了 AI 愛克斯開發板與 LabVIEW 聯合實現對麥克納母輪小車的精確控制的可能性和有效性。LabVIEW 的圖形化編程環境不僅使得控制邏輯的設計和實現更為直觀,而且其豐富的數據處理能力也為我們提供了強大的后盾。同時, AI 愛克斯開發板控制板以其高性能處理器和豐富的接口,有效地執行了我們設計的控制算法,實現了對麥克納母輪小車的控制。
值得指出的是,這樣的軟硬件結合模式不僅限于實現麥克納母輪小車的基本運動控制,其開放的設計和強大的處理能力為我們提供了在此基礎上實現更多人工智能算法的可能性。例如,我們可以在此系統上實現自主導航、避障、物體追蹤等高級功能,從而將麥克納母輪小車開發成一個功能強大的移動機器人平臺。
更為重要的是,這種結合AI 愛克斯開發板和 LabVIEW 的控制方式也為 STEAM 教育提供了一種新的可能。通過編程控制麥克納母輪小車,學生們可以更好地理解和學習科學、技術、工程、藝術和數學相關的知識,同時也能激發他們的創新思維和動手能力。我們期待看到,麥克納母輪小車在此控制系統的驅動下,能夠成為 STEAM 教育的一種新的、有趣的教學工具,激發更多學生對科技創新的興趣。
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28379瀏覽量
206916 -
人工智能
+關注
關注
1791文章
47183瀏覽量
238252 -
應用程序
+關注
關注
37文章
3265瀏覽量
57677
原文標題:使用AI愛克斯開發板與LabVIEW實現麥克納母輪小車的控制 | 開發者實戰
文章出處:【微信號:英特爾物聯網,微信公眾號:英特爾物聯網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
搭載勘智K230的AI視覺開發板介紹


基于哪吒開發板部署YOLOv8模型







 工商網監
工商網監
評論