 ROS系統的本地搭建(上)
ROS系統的本地搭建(上)
有關ROS系統的相關知識已經在上一篇文章中進行了闡述,在本篇文章中,將就ROS的進一步搭建方法做闡述。
??:本文中“消息代理”、“主服務器”、“Master Server”是相同的意思,可以互換。
0× 1
關于版本選擇
目前穩定的ROS系統有三個版本可供選擇
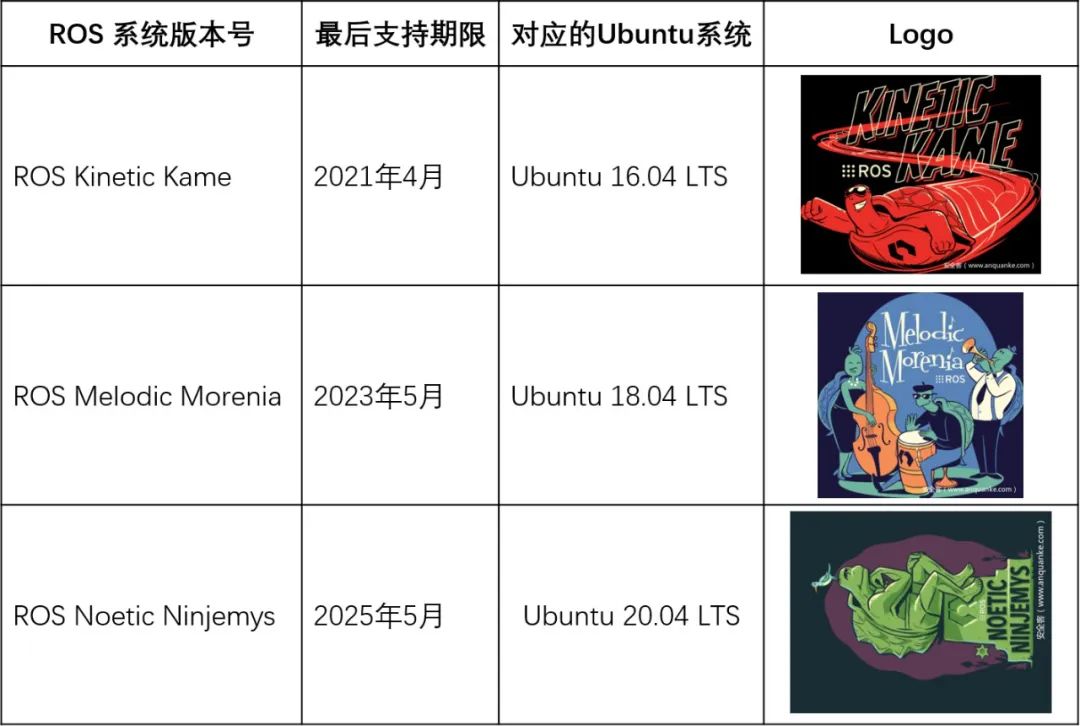
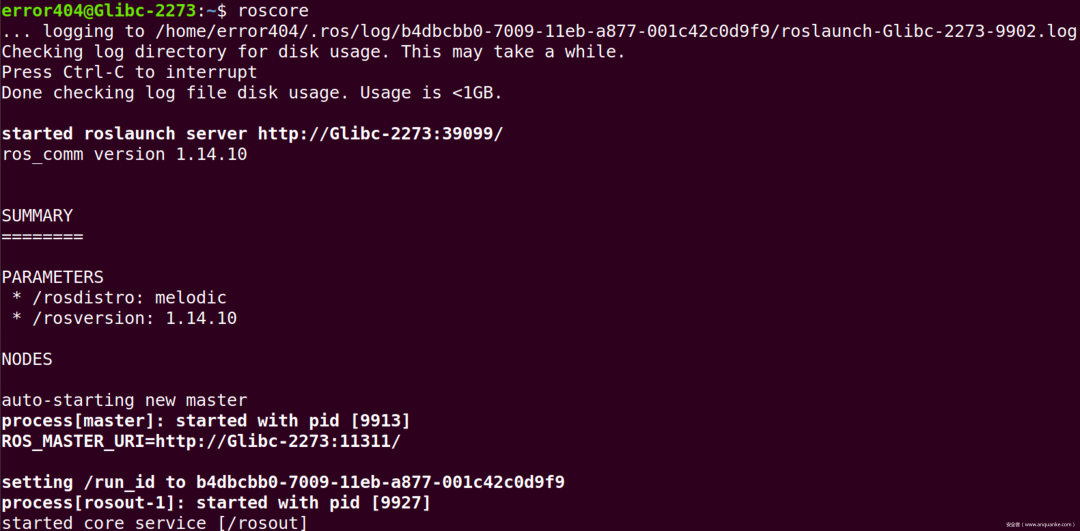
我們此處以ROS Melodic Morenia為例進行本地環境的搭建,選用Ubuntu 18.04 LTS。
??:盡管實際的ROS交互并不需要任何的圖形化界面,但是為了演示方便,我們此處還是選用帶有用戶圖形界面的Desktop版本。
0× 2
本地搭建ROS環境
-
配置apt倉庫
使用以下命令啟用restricted、universe和multiverse存儲庫。
sudo add-apt-repository "deb http://archive.ubuntu.com/ubuntu $(lsb_release -sc) main universe restricted multiverse"
這里也可以換成阿貍云的存儲庫鏈接,但是必須是包含restricted、universe和multiverse的。
-
配置sources.list
使用以下命令啟用ros存儲庫。
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.sjtug.sjtu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
這里給出一些其他的鏡像源以供選擇:
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
物聯網
+關注
關注
2909文章
44568瀏覽量
372830 -
服務器
+關注
關注
12文章
9125瀏覽量
85335 -
ROS
+關注
關注
1文章
278瀏覽量
17001
發布評論請先 登錄
相關推薦
Micro-ROS:把ROS2放在MCU上
機器人的發展。 ? ROS便是為機器人在研發的過程中的代碼復用提供支持的開源框架,大量的機器人開源項目,從感知到控制、從定位到構圖、從導航到可視化,幾乎都使用ROS作為基礎。 ? Micro-ROS從何而來? ? Micro-
Cadence本地庫搭建從0到1的過程
本文將主要介紹Cadence本地庫搭建從0到1的過程,并提供搭建過程中所需要的安裝軟件。搭建Cadence本地庫的目的主要是為了方便元器件的
如何在ROS的基礎上提升無人駕駛系統的可靠性
本文著重介紹基于機器人操作系統ROS的無人駕駛系統。文中將介紹ROS以及它在無人駕駛場景中的優缺點,并討論如何在ROS的基礎
如何搭建實體機器人ros底盤
目錄介紹一、底盤主控板二、嵌入式開發板1. 與上位機pc的關系2. 與STM32主控板的關系介紹自下而上的分析實體機器人(差分輪速機器人)搭建中的關鍵過程。一、底盤主控板本部分搭建實體機器人ros
發表于 01-20 07:36
如何低成本搭建ARM+ROS的硬件載體?
bash,即進入命令交互進程。通過以下命令進入容器內部。進入后,可以操作容器內的命令,如下所示。通過exit命令,可退出容器,退出后容器就處于停止狀態,如下所示。通過以上操作,我們就完成了硬件與底層的搭建,為ROS運行在這套開發板上
發表于 10-13 12:02
搭建ARM+ROS的硬件載體之ROS的移植及測試方法
1. 準備工作 經過前面的環境搭建,HDG2L-IoT評估套件已經能穩定地運行Ubuntu+docker環境,當前需要下載運行ROS鏡像即可。 本文參考ROS官方文檔《Getting
發表于 03-09 13:55
搭建ARM+ROS的硬件載體之ROS部署前的籌備工作及步驟分解
1. 方案概述 本文重點介紹低成本搭建ARM+ROS的硬件及底層實現。開發板選用HDG2L-IoT評估套件,默認配置為2G內存、8G存儲,搭載可玩性極高的Ubuntu系統。 開發套件默認
發表于 03-09 14:11
本地測試環境搭建
本文主要介紹了本地測試環境搭建搭建一個本地測試環境無疑是個明智的選擇,再結合GitHub、Jenkins、Docker等工具,進行持續集成、資源隔離,既可以快速的構建、部署自己的項目,

ROS在Zedboard上的移植
ROS全稱robot operaring system,一般ROS是應用在Ubuntu系統中,本次移植是將ROS移植到Zedboard上的L
發表于 10-26 11:52
?1093次閱讀
ROS系統的本地搭建(下)
有關ROS系統的相關知識已經在上一篇文章中進行了闡述,在本篇文章中,將就ROS的進一步搭建方法做闡述。
??:本文中“消息代理”、“主服務器”、“Master Server”是相
實現ARM+ROS(機器人操作系統)之環境搭建!
如何低成本搭建ARM+ROS的硬件載體?上文為大家介紹了實現的思路及原理,本文將為讀者實際操作,展示ROS部署前的籌備工作及步驟分解。

實現ARM+ROS(機器人操作系統)之運行ROS!
如何低成本搭建ARM+ROS的硬件載體?上文展示ROS部署前的籌備工作及步驟分解,本文將為大家演示ROS的移植及測試方法。

超級干貨!本地搭建代碼托管平臺Gitea
,運行時對CPU和內存的需求較小,適用于個人或小型團隊協作開發,適合在個人電腦或資源受限的服務器上使用。2Gitea的本地搭建本次搭建環境演示系統






 工商網監
工商網監
評論