

點是描述地理空間的最小單元,世間萬物都可以通過一系列具有三維坐標和屬性的點來刻畫,形成我們肉眼所見的世界。二維的點集可以形成圖像和照片,三維的點集則可以逼真地還原我們所處的三維空間,形成數字城市、數字地球等,產生讓人們猶如置身其中的沉浸式體驗。
這些點是怎么獲取、又是怎樣具有時空信息的呢?這就離不開為我們精準感知世界提供“慧眼”的激光雷達。那么,什么是激光雷達,它是如何工作來獲取萬物之點呢?
什么是激光?
“激光”來自英文“LASER”,也有譯為“鐳射”,是Light Amplification by Stimulated Emission of Radation的縮寫,即受激輻射的光放大。1916年愛因斯坦發現了激光的原理——原子受激輻射的光,即原子中的電子吸收能量后從低能級躍遷到高能級(受激吸收)、再從高能級回落到低能級時所釋放的能量以放大了的光子形式發出(受激輻射),這個被放大的光就是激光。1964年我國科學家錢學森建議將“光受激輻射”改為“激光”。
一提到激光,很多人會想到激光武器、激光手術、激光焊接和切割等,似乎激光是一種對人體具有極大殺傷力的光。其實,激光也分等級,功率越低對人眼越安全,因此人們利用低功率激光生產激光電視、進行激光雷達測繪等。本文主要介紹對地觀測激光雷達的相關知識。
什么是激光雷達?
激光雷達,英文為Light Detection And Ranging,簡稱LiDAR,即光探測與測距。光探測首先需要一個激光源,即激光器發射高頻率激光脈沖到被測物的表面;其次是接收系統,即接收物體表面反射的激光脈沖并對回波進行處理,一般由望遠鏡和各種光電探測器組成,通過測量激光發射到接收經過的時間,結合光速即可計算出被測物體相對于探測器的距離。
激光雷達怎么獲取點的空間位置及幾何信息呢?這就需要全球衛星導航定位系統(GNSS)來提供地球表面或近地空間任何地點的三維坐標和時間信息,如我國的北斗衛星導航系統(BDS)、美國的GPS等,以及監測搭載激光雷達系統平臺姿態的慣性測量系統(Inertial Measurement Unit,簡稱IMU)。GNSS和IMU集成為導航定位定向系統(Position and Orientation System, POS),提供激光雷達系統的空間位置和姿態信息。可見,激光雷達集激光器系統、全球定位系統和慣性導航系統于一身(圖1),是當前直接快速獲取探測目標空間位置及其幾何信息的最有效手段之一。
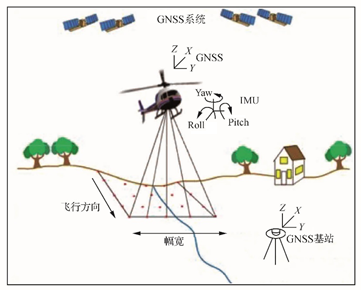
圖1機載激光雷達系統組成
激光雷達如何工作?
激光雷達名字高大上,工作原理卻很簡單。激光器向目標物發射一束很窄的激光脈沖,部分脈沖在地物表面被反射后由接收器接收,系統通過記錄激光脈沖從發射到返回的時間間隔t(Time of Flight, TOF)來計算激光器和目標之間的距離R,R=?·c·t(c為光在空氣中的傳播速度)。利用距離R和掃描角,結合POS系統測量的激光雷達系統的位置和姿態數據,通過坐標解算即可得到被測物及周圍環境各點在地理空間參考下的三維坐標,這些帶有xyz坐標的點在三維空間呈離散分布,人們形象地稱為“點云”(圖2),可在點云數據處理軟件(如點云魔方等)進行三維顯示、量測、建模以及多行業應用等。
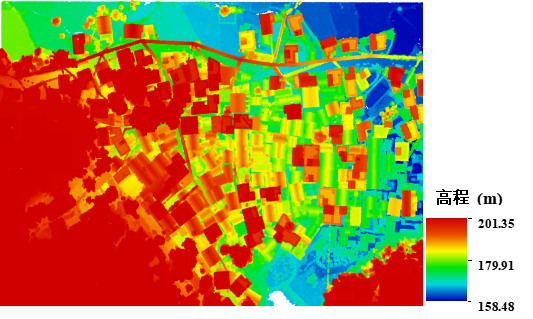
圖2 原始點云數據按高程顯示
常見的激光雷達有哪些?
激光雷達種類很多,按照不同分類方法介紹如下:
(1)按照搭載平臺可分為星載、機載和地基激光雷達(圖3)。其中星載激光雷達主要以衛星、航天飛機、空間站等為平臺,觀測范圍和應用尺度廣,多用于科學研究,如美國的ICESat、ICESat-2和我國陸地生態系統碳衛星“句芒號”;機載主要以固定翼飛機、直升機、無人機等為平臺,適合長距離線狀地物三維信息獲取;地基包括三腳架、車載、背包、手持以及船載等,特點是獲取數據全面、方式靈活。

圖3 不同平臺激光雷達系統
(2)按照測距模式可分為脈沖式和相位式激光雷達。前者利用激光脈沖在發射和接收信號之間往返傳播的時間差進行測量,直接、測量距離長。相位式是一種間接方式,利用電波頻率對激光波束進行幅度調制,測定調制光往返觀測目標一次所產生的相位延遲,根據波長計算該延遲所代表的距離,測距相對較短,但脈沖頻率和獲取的點精度更高。
(3)按照光斑大小可分為大光斑和小光斑激光雷達,前者光斑直徑通常超過10m,目前主要是指星載激光雷達系統,如美國ICESat/GLAS(Geoscience Laser Altimeter System)光斑直徑約70m、我國高分七號獲取的光斑直徑約17m,缺點是點密度低、無法成像,但可獲取全球范圍的數據,在大尺度地學應用方面有優勢。小光斑激光雷達光斑直徑為厘米甚至毫米級,點密度和精度高,通常可以成像,主要指機載和地基激光雷達系統。
(4)按照探測與記錄方式可分為離散點云、全波形和光子計數激光雷達。離散激光雷達最為普遍,商業化應用廣泛,如數字城市中的建筑物三維重建、文化遺產數字化和重建等。全波形激光雷達對回波進行連續采樣,記錄信息更為精細,能獲取目標完整的垂直剖面信息,廣泛應用于林業調查,如ICESat/GLAS、GEDI以及部分地基/機載LiDAR等。光子計數激光雷達不同于前兩者,采用微脈沖激光器和高靈敏度光子探測器,將回波信號(單光子級別)計數為光子點,優點是利用較低的激光能量獲取遠距離空間目標信息,如目前在軌的ICESat-2/ATLAS。
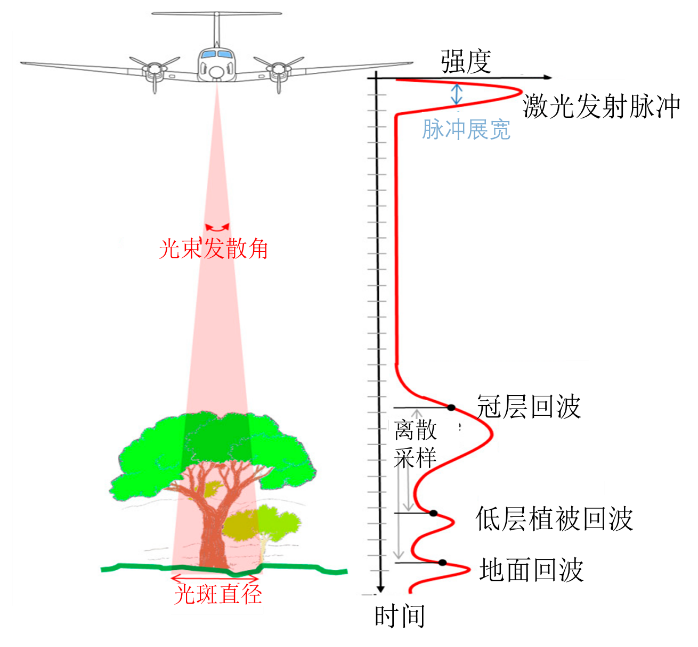
圖4全波形LiDAR工作示意圖
激光雷達有什么優缺點?
激光雷達優點很多,相對于被動光學遙感,首先它主動發射激光脈沖,可以在夜間工作;其次獲取三維信息直接快速,高頻率激光脈沖具有一定穿透性,可以穿透森林冠層到達林下,獲取林下地形信息,用于林業調查、密林考古等;此外藍綠激光(通常采用532nm波長)還可以穿透一定深度的水體,獲取水下地形及水質情況,用于島礁水深測量、近岸水下考古等。
雖然激光雷達有很多優點,但在大雨、濃霧、濃煙等環境下系統發射的脈沖會急劇衰減,導致獲取的數據質量下降或者數據缺失。同時激光點云離散分布,目前以單波長激光雷達系統為主,在光譜和紋理信息獲取方面比傳統的被動光學影像稍遜色。
激光雷達能干啥?
激光雷達的應用非常廣泛,如基礎測繪、林業調查、無人駕駛、室內建模、數字城市、電力巡檢、交通選線、文化遺產保護等,在極地冰蓋、海洋、陸地,大氣層、月球、火星表面測繪中,都有激光雷達的身影。
(1)基礎測繪:星載激光雷達可獲取亞米級高程信息,為制作全球、月球表面高精度控制點提供支持。機載激光雷達獲取的高密度點云經過處理,可生成數字高程模型(DEM)、數字線劃圖(DLG)、等高線等,為其他應用提供基礎測繪數據。
(2)林業調查:激光雷達可以獲取植被冠層高密度點云,高頻率激光脈沖可穿透植被冠層到達地面,不僅可獲取精細的冠層垂直結構信息,還可得到林下地形信息,進而提取樹高、冠幅、葉面積指數、生物量等,為森林碳匯模型提供輸入。
(3)數字城市:機載、車載激光雷達可快速獲取城市中各種構筑物及周圍環境完整的三維點云數據,構建的三維數字模型可置于網絡中,實現數字化管理及交互呈現,讓用戶有沉浸式體驗,這也是當前“實景三維中國”的重要內容。
(4)數字電網:激光雷達可在線路設計、電力設施數字化、危險點檢測、預警分析、變電站數字化與管理等方面發揮作用,如線路安全巡檢中,基于三維點云可精確探測電力線、電力塔的空間位置及其與線下地表面、植被的空間距離,進行電力線與地物、電力線檔距、線下植被的安全距離分析,還可結合桿塔上的溫度、風速等數據,模擬不同工況下電力線弧垂變化等。
(5)文化遺產數字化與保護:激光雷達獲取遺產本體高精度高密度點云,結合其攜帶的高分辨率數碼相機獲取遺產特征信息,構建真三維數字模型,進行數字化展示與保存;還可對考古現場進行數字化記錄、對出土文物進行量測和數字修復等;在密林考古中獲取林下地形信息,結合歷史資料分析古遺址古環境等。
(6)無人駕駛:安裝了激光雷達的無人車在行駛中,激光脈沖遇到障礙物后會返回,系統計算與目標間的相對距離,幫助汽車自主感知道路環境和避障。同時激光雷達可以準確測量視場中物體輪廓邊緣與車身的相對距離,并通過三維建模繪制3D高精地圖,為無人車“開路”。
(7)交通線路規劃:激光雷達不同于單點定位方式,通過掃描獲取的高密度高精度點云可提供公路全景三維數字模型。鐵路隧道施工中可利用激光雷達進行斷面圖生產,爆破面積與體積、開挖土方量計算,開挖隧道壁的平整度分析、超欠挖、隧道掘進方向檢校等。
(8)礦山監測:礦山特別是露天礦的開采規模和深度不斷擴大,給礦區邊坡、土體等穩定性帶來威脅。激光雷達將點測量擴展到面測量,深入復雜環境中直接獲取這些大型、復雜實體的完整三維空間數據,并快速重構目標的三維模型,通過多時相監測獲取礦體的變形信息,為礦區安全監測提供支持。
(9)近岸水深與水底地形測量:532nm波長的激光脈沖(藍綠激光)可以穿透一定深度的水體獲取水深及水底地形信息,成為海岸線變化監測、湖泊水位測量、水下考古等的重要技術手段。
除了上述應用,激光雷達還可用于極地冰蓋、高原冰川高度及消融變化監測、高鐵/地鐵軌道變形監測、農作物長勢和估算產量、交通事故數字化記錄等。有“冰絲帶”之稱和“最快的冰、最平的冰”的國家速滑館,即采用了精度優于2mm的高精度三維激光掃描技術輔助冰場地下制冰排管的精確安裝。
未來的激光雷達
未來的激光雷達可從激光雷達硬件系統、數據處理和應用方面來分析。
當前商業化激光雷達系統研制已進入爆發期,各種性能的激光雷達呈百花齊放的態勢。總體來說,激光雷達系統趨向于高性能、低成本、輕小型化,具有更高的測距精度、更大的掃描范圍、更快的掃描頻率、更窄的光束發散角和更遠的測量距離。自帶激光掃描頭的手機等使激光雷達進入消費級市場。同時,高光譜/多光譜激光雷達的出現彌補了單波長(近紅外的1064nm、1550nm等)或者雙波長(1064nm和532nm)激光雷達系統獲取信息單一、缺乏光譜信息等不足,成為未來發展方向。高光譜/多光譜激光雷達可獲取不同波段下的激光雷達回波,不僅具備空間三維信息獲取能力,并且同時具備地物光譜信息獲取能力,逐漸成為植被結構和生化參數反演的最佳手段。另外,隨著量子信息技術的發展,量子激光雷達具有更強的抗干擾性、更高的靈敏度和距離與角度分辨率。
在數據處理方面,多平臺(星機地)、多模態(點云、波形、光子)激光雷達系統為多行業應用提供了多源、海量三維數據,這些數據各具特點、優勢互補,實際應用中多源數據精準配準和定量應用一直是難點,亟待發展先進的人工智能、深度學習等方法,為激光雷達大數據的處理和應用提供支持。
審核編輯:劉清
-
GNSS
+關注
關注
9文章
851瀏覽量
49120 -
激光雷達
+關注
關注
971文章
4210瀏覽量
192230 -
IMU
+關注
關注
6文章
341瀏覽量
46555 -
LiDAR芯片
+關注
關注
1文章
18瀏覽量
3319
原文標題:激光點云感知三維空間
文章出處:【微信號:bdtdsj,微信公眾號:中科院半導體所】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛中常提的“點云”是個啥?

一種基于基礎模型對齊的自監督三維空間理解方法
三維測量數據處理流程
三維激光掃描儀的數據可視化技術
三維激光掃描儀與無人機結合的應用
三維激光掃描儀應用領域 三維激光掃描儀與傳統測量工具比較
我國科學家研制出具有仿生三維架構的新型電子皮膚系統
友思特方案 基于三維點云實現PCB裝配螺絲視覺檢測

泰來三維 三維激光掃描結合BIM在工廠掃描建模中的優勢
三維可視化的魅力與應用
愛普生IMU產品在激光雷達測繪中的應用

泰來三維|三維激光掃描技術在古建筑保護中的應用






 工商網監
工商網監

評論