 詳解列控中心與ZPW-2000軌道電路接口
詳解列控中心與ZPW-2000軌道電路接口
概述
列控中心(TCC)與ZPW-2000系列軌道電路接口采用CAN總線通信,連接TCC和軌道電路通信接口單元。
TCC向ZPW-2000系列軌道電路發送載頻和低頻編碼等信息,ZPW-2000系列軌道電路向TCC發送軌道區段狀態等信息。
通過該接口實現軌道編碼控制和軌道占用狀態獲取。
總線特點
TCC通過CAN總線與軌道電路通信接口單元(以下簡稱通信接口單元)連接。通信接口單元成對冗余配置,每對通信接口單元對應最多控制10個軌道電路區段。

01
遵從CAN2.0B協議標準
CAN(Controller Area Network)是一種用于實時控制系統中通信的串行通信總線協議,由德國BOSCH公司于1986年開發。CAN總線協議廣泛應用于汽車、工業自動化、醫療設備等領域。
CAN2.0B是CAN協議的一種擴展協議,也稱為CAN 2.0(Bosch)協議。
02
使用擴展結構格式
CAN2.0B協議標準支持兩種幀格式:標準幀格式(11位標識符)和擴展幀格式(29位標識符)。
TCC與軌道電路通信接口單元采用擴展幀格式進行通信。對比實際擴展幀格式和協議描述:
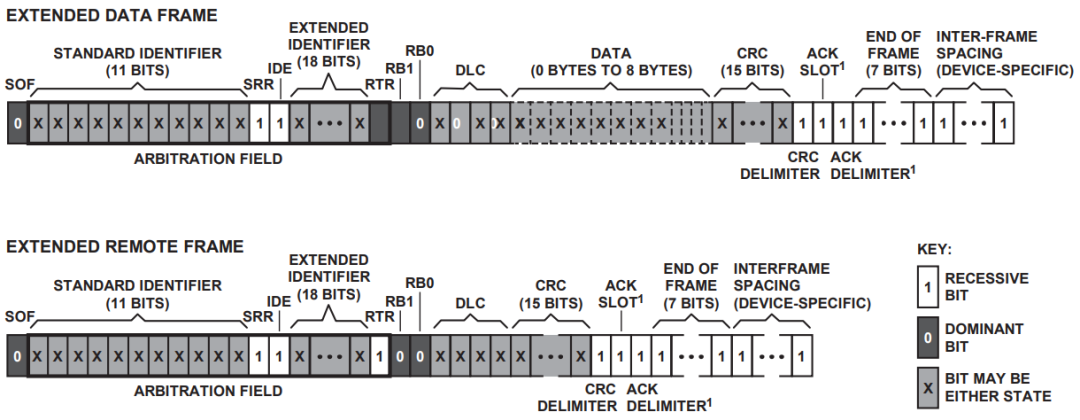
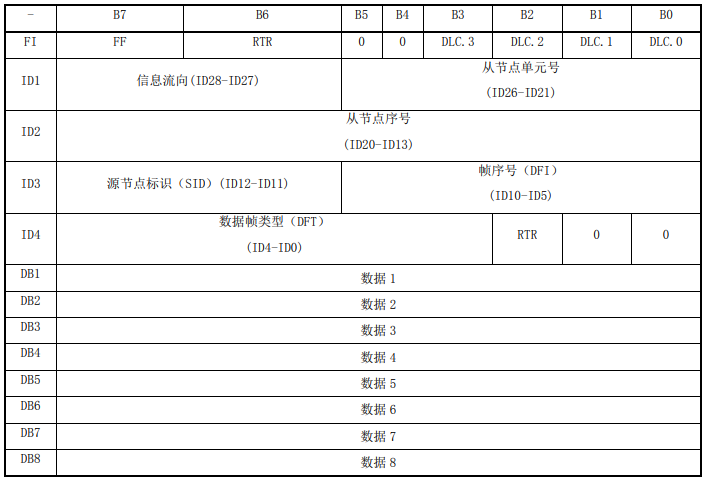
其中FF可以理解為識別符擴展位,即標準幀為顯性"0",擴展幀為隱性“1”。
RTR為遠程標志位,遠程幀為隱性“1”,數據幀為顯性“0”。
DLC為數據長度,使用4位二進制描述0-8個字節長度。
其余內容均根據實際應用特征定義。
03
通信拓撲結構為總線型
總線通信采用分時間片,主從式同步傳送方式,只允許由主節點到從節點或從節點到主節點,不允許從節點之間互相傳送信息。
我們知道CAN協議標準的一個優勢就是仲裁機制,即數據以電平形式在CAN總線傳輸過程中,按位優先顯示顯性(低電平“0”)然后再顯示隱形(高電平“1”),那么為什么還要采用分時間片的方式進行數據傳遞呢?
實際上仲裁機制確實可以實現1個主節點(TCC)和n個從節點(通信接口單元)通信方式,但是除通信鏈路兩端收發節點外,會引入其他節點參與仲裁判斷,無形中增加了鏈路故障點。除此外,仲裁產生的數據通信延時也是很難控制的,會使得通信數據過程難以追蹤,不便于總線調試和維護。
04
通信速率為1Mbit/s
CAN2.0B協議標準的數據傳輸速率可以達到1Mbps,高于CAN2.0A協議的500Kbps。
05
軌道電路通信接口單元地址分配
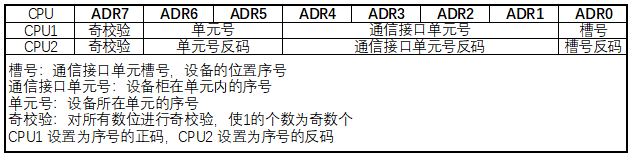
這里的地址(ADR)是指,軌道電路通信接口單元識別的GPIO硬線信號。
相同的通信接口單元通過讀取不同的硬線地址信號,確定發送CAN通信數據中的地址內容。
06
地址碼和屏蔽碼
CAN總線通信中主節點和從節點采用1對多方式,而從節點之間是不允許相互傳送信息的。那么總線節點就需要有一種能夠過濾總線無效信息,只接收所需信息的方法。
是不是可以通過在應用程序中對接收到的信息進行識別,只保留需要的信息呢?
這樣是不行的,當總線數據較少,且通信周期充裕時,或許可以嘗試。但當總線數據周期占用率很高,而單節點所需數據在周期內占比又很低的情況時。通過應用來處理大量的無用數據就會使系統運行非常低效,而且會占用很多的軟件中斷資源,所以在處理CAN數據時很少使用這種方式。
而采用CAN控制器中的屏蔽寄存器設置同樣可以實現過濾效果,而且通過硬件實現過濾,能夠使處理過程更加高效。
ACR寄存器是用于實現點對點屏蔽設置,AMR寄存器是用于實現一點對多點屏蔽。
CAN節點在設置ACR值和AMR值之后,當AMR值對應位為“0”時,該節點只能接收與ACR該位的值相同的地址,而當AMR值對應位為“1”時,該節點將屏蔽ACR該位值,即該位可以是“0”或“1”的地址。
例如:列控1系CPU1的ACR值0x8000 FFFF,AMR值0x7FFF 0000,那么列控1系CPU1可以接收地址ID1、ID2為0b1*** **** **** ****的所有數據。
通信接口單元 0 槽號 0 CPU1的ACR1值0b0001 0111,AMR1值0b0110 1000,那么該CPU只能接收地址ID2為0b0**1 *111的數據。
07
數據幀類型
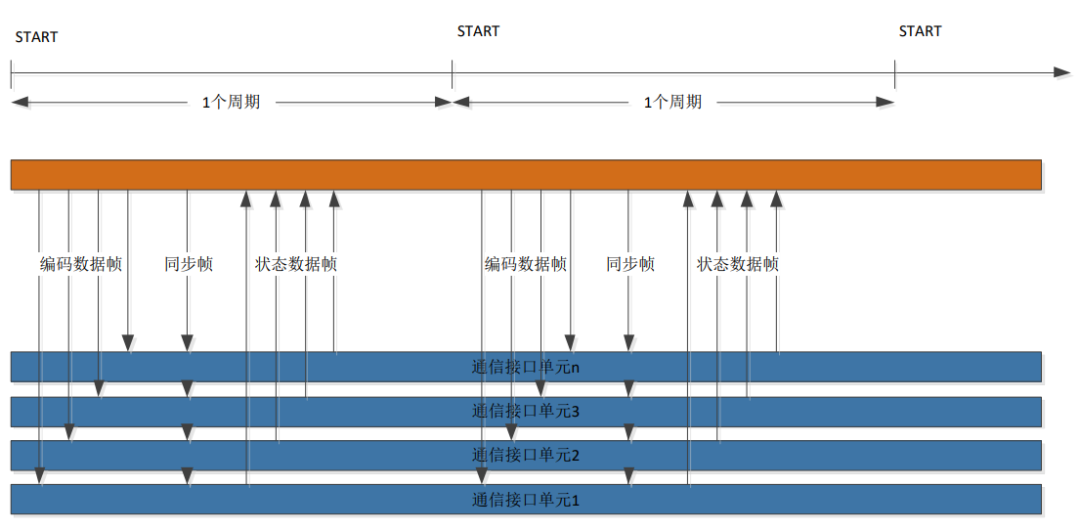
TCC與通信接口單元的數據幀類型總共有三種:
a) TCC→通信接口單元(同步幀)
用于告知各從節點發送數據的時間基準,各從節點根據接收到同步幀的時刻起依次延時固定毫秒后發送狀態數據。
b) TCC→通信接口單元(編碼數據幀)
TCC每周期固定向各個通信接口單元依次發送編碼數據幀,發送完畢后發送一幀同步幀。數據內容包括主軌道載頻、小軌道載頻、主軌道低頻、小軌道低頻。
c) 通信接口單元→TCC(狀態數據幀)
通信接口單元在收到TCC發送的同步幀后根據所屬地址延時固定毫秒后,發送狀態數據。數據內容包括主機主軌道狀態、并機主軌道狀態、主機小軌道狀態、并機小軌道狀態。
總線時序示意圖如下:
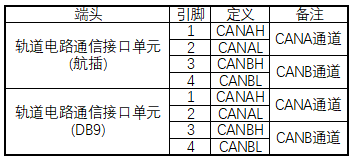
通信線纜端頭引腳定義
TCC側DB9引腳

軌道電路通信接口單元側引腳
-
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
CAN總線
+關注
關注
145文章
1946瀏覽量
130727 -
AMR
+關注
關注
3文章
427瀏覽量
30223 -
GPIO
+關注
關注
16文章
1204瀏覽量
52055
發布評論請先 登錄
相關推薦
[轉帖]基于MSP430的軌道電路在線測試儀設計與實現
采用單片機的軌道壓力測試儀設計
軌道電路分路不良分析
淺析微電子相敏軌道電路對絕緣破損的防護
基于軌道電路的鐵路道口列車測速系統設計

基于單片機的不對稱脈沖軌道電路接收器設計與實現

軌道電路的作用
25赫茲相敏軌道電路全電子接收器的研究與實現的論文說明
軌道電路無功補償用哪種電容器好?





 工商網監
工商網監
評論